基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器
- 国知局
- 2024-08-01 05:57:09
本发明涉及仿生扑翼飞行器领域,尤其涉及一种基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器。
背景技术:
1、目前,飞行器在生活中的应用越来越多,其中扑翼飞行器同样也被进行应用。然而,目前较多的飞行器在飞行时,由于气流和涡流的存在,会导致飞行时受到较多的气动阻力,降低飞行效率,影响飞行稳定性。
2、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明的主要目的在于提供一种基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,旨在解决现有技术中在飞行器飞行时,由于气流和涡流的存在,会导致飞行时受到较多的气动阻力,降低飞行效率,影响飞行稳定性的问题。
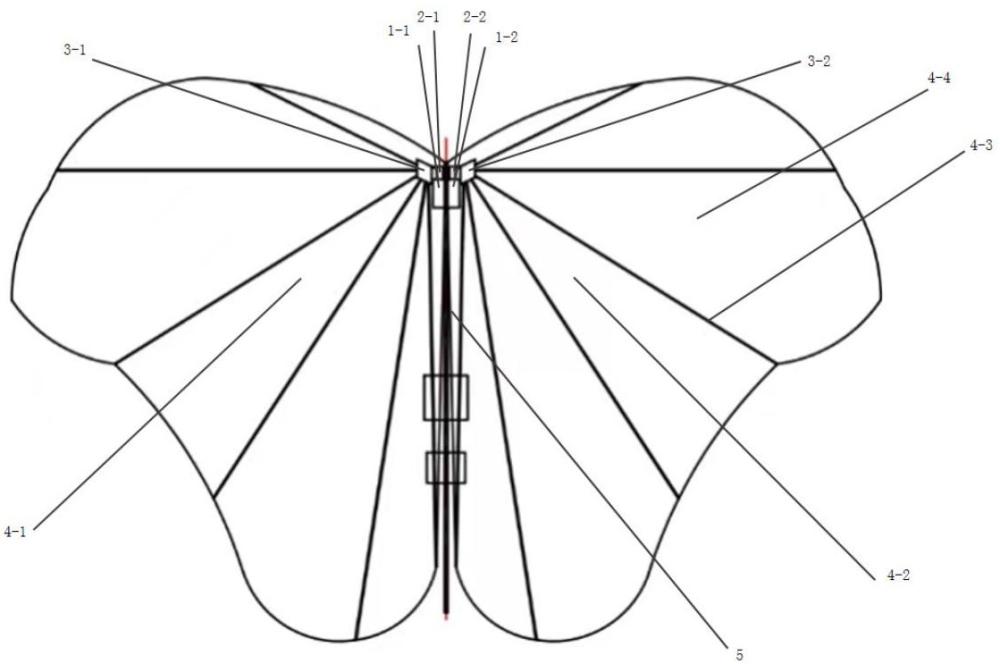
2、为实现上述目的,本发明提供一种基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,所述基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器包括:
3、机架,沿所述仿生扑翼飞行器的纵向轴线延伸;
4、舵机,设置在所述机架上,所述舵机用于带动摆臂转动;
5、摆臂,与所述舵机连接,用于带动翅膀转动;
6、连接件,用于连接所述摆臂和翅膀;
7、翅膀,通过连接件与所述舵机连接,用于捕捉和利用空气动力;
8、其中,所述翅膀采用厚度非对称性结构构建,并且所述翅膀上设置有凹凸与褶皱。
9、可选地,所述舵机包括第一舵机和第二舵机,所述摆臂包括第一摆臂和第二摆臂,所述连接件包括第一连接件和第二连接件,所述翅膀包括第一翅膀和第二翅膀。
10、可选地,所述第一舵机设置在所述机架的一侧,所述第一摆臂与所述第一舵机连接,并通过所述第一连接件连接所述第一摆臂和所述第一翅膀;
11、所述第二舵机设置在所述机架的一侧,并且在所述第一舵机的对侧,所述第二摆臂与所述第二舵机连接,并通过所述第二连接件连接所述第二摆臂和所述第二翅膀。
12、可选地,所述第一翅膀和所述第二翅膀包括翅脉和薄膜;
13、其中,制作所述翅脉的材料采用碳纤维预浸料、玻璃纤维和尼龙中的一种或多种,制作所述薄膜的材料采用尼龙、锦丝绸、无纺布和塑料薄膜中的一种或多种,所述塑料薄膜包括聚乙烯、聚氯乙烯、聚酯薄膜和聚酰亚胺,并且在所述第一翅膀和所述第二翅膀上分别设置有凹凸与褶皱。
14、可选地,所述翅膀的前缘厚度为0.025毫米,所述翅膀的后缘厚度为0.0125毫米,所述翅膀从前缘到后缘厚度均匀递减。
15、可选地,将所述薄膜设置在所述翅脉上时,采用套管连接方式和碳纤维固化方式中的一种方式;
16、其中,所述套管连接方式,对翅脉交界处设计连接套管和褶皱,将所述套管用胶水粘在薄膜对应的位置,并再将翅脉插到套管中;
17、所述碳纤维固化方式,采用所述碳纤维预浸料为所述翅脉的材料根据预浸料中在碳纤维表面浸渍的树脂体系,将按分布方案预设的翅脉粘在聚脂薄膜上,密封在真空袋中,放入恒温箱,根据抽气泵形成袋内真空环境,并在加压加热的环境下固化。
18、可选地,所述机架和所述连接件分别采用3d打印直接成型方法和激光切割制造方法中的一种方法制造。
19、可选地,制作所述连接件的材料采用abs树脂、铝合金和钛合金中的一种或多种。
20、可选地,制作所述机架的材料采用碳纤维板、玻璃纤维板和铝合金中的一种或多种。
21、此外,为实现上述目的,本发明还提供一种基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器的飞行控制方法,其中,所述基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器的飞行控制方法包括:
22、获取飞行需求,根据所述飞行需求调整舵机摆动中心位置;
23、当所述飞行需求为进行平稳飞行时,控制舵机摆动中心位置设置为水平方向;
24、当所述飞行需求为进行俯仰运动时,在进行上扑动飞行时,控制舵机摆动中心位置设置为向上,在进行下扑动飞行时,舵机摆动中心位置设置为向下。
25、本发明中,基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器包括:机架,沿所述仿生扑翼飞行器的纵向轴线延伸;舵机,设置在所述机架上,所述舵机用于带动摆臂转动;摆臂,与所述舵机连接,用于带动翅膀转动;连接件,用于连接所述摆臂和翅膀;翅膀,通过连接件与所述舵机连接,用于捕捉和利用空气动力;其中,所述翅膀采用厚度非对称性结构构建,并且所述翅膀上设置有凹凸与褶皱。本发明提供的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,有益效果包括:
26、(1)本发明中,通过舵机以及摆臂和连接件的设计,实现了舵机与翅膀的联动,这种结构简单、紧凑,同时能够有效地传递舵机的运动到翅膀上,使得翅膀能够通过振动产生升力;
27、(2)本发明中的仿生扑翼飞行器所具有的翅面凹凸与褶皱,通过引导气流可以减少涡流产生,有效地降低了飞行时的气动阻力,进而提升了飞行效率;其次,这种结构使翅面更接近真实蝴蝶翅膀的形态,不仅增强了飞行器的稳定性和机动性,还优化了其空气动力学性能,使飞行更加灵活可控;此外,翅面的凹凸与褶皱增加了表面积,从而增强了飞行器在拍动翅膀时捕捉和利用空气动力的能力,提高了升力,使飞行器更容易起飞和维持飞行状态;
28、(3)本发明中的仿生扑翼飞行器所具有的厚度非对称性结构的翅膀,可以通过改变扇动模式和频率,实现能量的高效利用,从而提高飞行器的续航能力。
技术特征:1.一种基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,所述基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器包括:
2.根据权利要求1所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,所述舵机包括设置在机架一边的第一舵机和设置在机架另一边的第二舵机,所述摆臂包括设置在所述第一舵机上的第一摆臂和设置在第二舵机上的第二摆臂,所述连接件包括设置在第一摆臂上的第一连接件和设置在第二摆臂上的第二连接件,所述翅膀包括设置在所述第一连接件上的第一翅膀和设置在所述第二连接件上的第二翅膀。
3.根据权利要求2所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,所述第一舵机设置在所述机架的一侧,所述第一摆臂与所述第一舵机连接,并通过所述第一连接件连接所述第一摆臂和所述第一翅膀;
4.根据权利要求2所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,所述第一翅膀和所述第二翅膀包括翅脉和薄膜;
5.根据权利要求1所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,所述翅膀的前缘厚度为0.025毫米,所述翅膀的后缘厚度为0.0125毫米,所述翅膀从前缘到后缘厚度均匀递减。
6.根据权利要求4所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,将所述薄膜设置在所述翅脉上时,采用套管连接方式和碳纤维固化方式中的一种方式;
7.根据权利要求1所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,所述机架和所述连接件分别采用3d打印直接成型方法和激光切割制造方法中的一种方法制造。
8.根据权利要求1所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,制作所述连接件的材料采用abs树脂、铝合金和钛合金中的一种或多种。
9.根据权利要求1所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,其特征在于,制作所述机架的材料采用碳纤维板、玻璃纤维板和铝合金中的一种或多种。
10.一种如权利要求1-9 任一项所述的基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器的飞行控制方法,其特征在于,所述基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器的飞行控制方法包括:
技术总结本发明公开了一种基于蝴蝶翅膀破缺结构和厚度非对称性的仿生扑翼飞行器,所述仿生扑翼飞行器包括:机架,沿所述仿生扑翼飞行器的纵向轴线延伸;舵机,设置在所述机架上,所述舵机用于带动摆臂转动;摆臂,与所述舵机连接,用于带动翅膀转动;连接件,用于连接所述摆臂和翅膀;翅膀,通过连接件与所述舵机连接,用于捕捉和利用空气动力;其中,所述翅膀采用厚度非对称性结构构建,并且所述翅膀上设置有凹凸与褶皱。本发明所公开的仿生扑翼飞行器可以通过引导气流、减少涡流产生,有效地降低了飞行时的气动阻力,进而提升了飞行效率。技术研发人员:穆正知,宋文达,柳家祥,马金美,姚家伟,岳远琪,李含秋,杨惠翔,赵骏,李博,韩志武受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/222101.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。