卫星的入轨速率阻尼方法、系统、设备和介质与流程
- 国知局
- 2024-08-01 05:57:54
所属的技术人员知道,本发明可以实现为系统、方法或计算机程序产品,因此,本发明可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是一一但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本发明中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
背景技术:
1、地球卫星按照轨道高度划分,分为低轨道地球卫星(简称:“低轨卫星”)、中轨道地球卫星(简称:“中轨卫星”)、高轨道地球卫星(简称:“高轨卫星”)。其中,中轨卫星主要是指卫星轨道距离地球表面2000km~20000km的卫星。它属于地球非同步卫星,主要是作为陆地移动通信系统的补充和扩展,与地面公众网有机结合,实现全球个人移动通信,也可以用作卫星导航系统。在全球个人移动通信和卫星导航系统中具有极大的优势。中轨卫星兼具静止轨道和低轨道卫星的优点,可实现真正的全球覆盖和更有效的频率复用。中轨通信卫星通常在轨寿命较长,配置单台电推进系统进行轨道维持,满足通信业务运行对轨道的需求。
2、卫星由运载火箭发射到预定轨道后进行星箭分离,由于火箭自身运动及星箭分离时分离机构作用,分离后卫星以一定的角速度相对惯性空间旋转,往往三轴角速度较大,超出飞轮角动量吸收能力,无法直接进入业务运行姿态;为了消除星箭分离扰动影响,降低星体姿态角速度,需要对卫星进行速率阻尼。
3、目前星箭分离后卫星速率阻尼方案,有以喷气推进为执行机构的喷气阻尼、以磁力矩器为执行机构的磁阻尼、以飞轮为执行机构的轮控阻尼等,以电推进为执行机构的速率阻尼方案及工程实施较少。由于中轨卫星尤其是10000km轨道高度的卫星,卫星运行环境磁场强度极弱,若用磁阻尼方案阻尼时间极长,不适合进行磁阻尼控制;可选用喷气进行阻尼控制,但喷气阻尼仅在入轨段仅执行一次,执行完毕后推进装置作为无用装置留置于星体。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,具体提供了一种卫星的入轨速率阻尼方法、系统、设备和介质,具体如下:
2、1)第一方面,本发明提供一种卫星的入轨速率阻尼方法,具体技术方案如下:
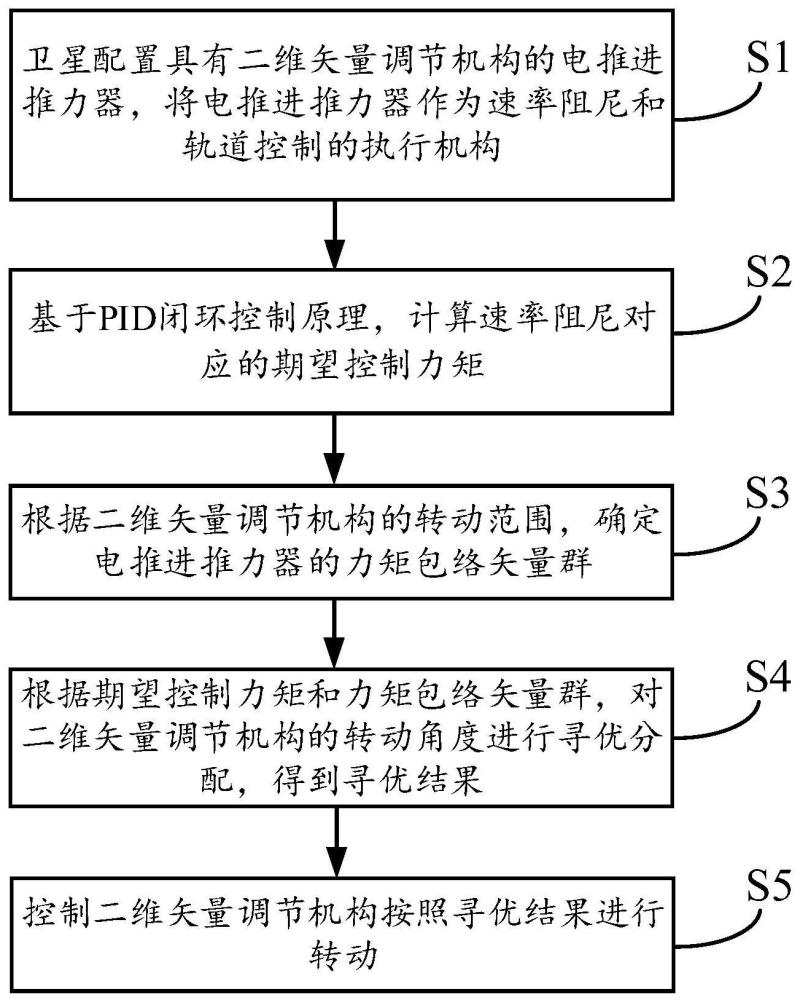
3、卫星配置具有二维矢量调节机构的电推进推力器,将电推进推力器作为速率阻尼和轨道控制的执行机构;
4、基于pid闭环控制原理,计算速率阻尼对应的期望控制力矩;
5、根据二维矢量调节机构的转动范围,确定电推进推力器的力矩包络矢量群;
6、根据期望控制力矩和力矩包络矢量群,对二维矢量调节机构的转动角度进行寻优分配,得到寻优结果;
7、控制二维矢量调节机构按照寻优结果进行转动。
8、本发明提供的一种卫星的入轨速率阻尼方法的有益效果如下:
9、考虑到卫星长期在轨以电推进作为执行机构进行轨道维持和控制,统筹轨道控制和入轨阻尼控制需求,选用带有推力矢量调节机构的电推进系统作为执行机构进行入轨速率阻尼,本发明同时能够简化轨道控制时的卫星姿态调整需求,通过调节电推进推力矢量调节机构调整推力方向至轨道控制时所需的推力方向;本发明适用于10000km中轨卫星的入轨星箭分离后的速率阻尼,工程实施可操作性强。
10、在上述方案的基础上,本发明的一种卫星的入轨速率阻尼方法还可以做如下改进。
11、进一步,还包括:确定电推进推力器在卫星中的布局。
12、进一步,根据期望控制力矩和力矩包络矢量群,对二维矢量调节机构的转动角度进行寻优分配,得到寻优结果,包括:
13、计算期望控制力矩分别与力矩包络矢量群中每个力矩矢量之间的夹角,判断所有夹角中的最小夹角是否小于夹角阈值,当判断结果为是时,则将最小夹角对应的转动角度确定为寻优结果。
14、进一步,卫星为中轨卫星。
15、2)第二方面,本发明还提供一种卫星的入轨速率阻尼系统,具体技术方案如下:
16、包括期望力矩确定模块、力矩包络矢量群确定模块、寻优模块和控制模块;
17、期望力矩确定模块用于:基于pid闭环控制原理,计算速率阻尼对应的期望控制力矩,其中,卫星配置具有二维矢量调节机构的电推进推力器,将电推进推力器作为速率阻尼和轨道控制的执行机构;
18、力矩包络矢量群确定模块用于:根据二维矢量调节机构的转动范围,确定电推进推力器的力矩包络矢量群;
19、寻优模块用于:根据期望控制力矩和力矩包络矢量群,对二维矢量调节机构的转动角度进行寻优分配,得到寻优结果;
20、控制模块用于:控制二维矢量调节机构按照寻优结果进行转动。
21、在上述方案的基础上,本发明的一种卫星的入轨速率阻尼系统还可以做如下改进。
22、进一步,还包括布局模块,布局模块用于:确定电推进推力器在卫星中的布局。
23、进一步,寻优模块具体用于:
24、计算期望控制力矩分别与力矩包络矢量群中每个力矩矢量之间的夹角,判断所有夹角中的最小夹角是否小于夹角阈值,当判断结果为是时,则将最小夹角对应的转动角度确定为寻优结果。
25、进一步,卫星为中轨卫星。
26、3)第三方面,本发明还提供一种计算机设备,计算机设备包括处理器,处理器与存储器耦合,存储器中存储有至少一条计算机程序,至少一条计算机程序由处理器加载并执行,以使计算机设备实现上述任一项卫星的入轨速率阻尼方法。
27、4)第四方面,本发明还提供一种计算机可读存储介质,计算机可读存储介质中存储有至少一条计算机程序,至少一条计算机程序由处理器加载并执行,以使计算机实现上述任一项卫星的入轨速率阻尼方法。
28、需要说明的是,本发明的第二方面至第四方面的技术方案及对应的可能的实现方式所取得的有益效果,可以参见上述对第一方面及其对应的可能的实现方式的技术效果,此处不再赘述。
技术特征:1.一种卫星的入轨速率阻尼方法,其特征在于,包括:
2.根据权利要求1所述的一种卫星的入轨速率阻尼方法,其特征在于,还包括:确定所述电推进推力器在卫星中的布局。
3.根据权利要求1所述的一种卫星的入轨速率阻尼方法,其特征在于,根据所述期望控制力矩和所述力矩包络矢量群,对所述二维矢量调节机构的转动角度进行寻优分配,得到寻优结果,包括:
4.根据权利要求1至3任一项所述的一种卫星的入轨速率阻尼方法,其特征在于,所述卫星为中轨卫星。
5.一种卫星的入轨速率阻尼系统,其特征在于,包括期望力矩确定模块、力矩包络矢量群确定模块、寻优模块和控制模块;
6.根据权利要求5所述的一种卫星的入轨速率阻尼系统,其特征在于,还包括布局模块,所述布局模块用于:确定所述电推进推力器在卫星中的布局。
7.根据权利要求5所述的一种卫星的入轨速率阻尼系统,其特征在于,所述寻优模块具体用于:
8.根据权利要求5至7任一项所述的一种卫星的入轨速率阻尼系统,其特征在于,所述卫星为中轨卫星。
9.一种计算机设备,其特征在于,所述计算机设备包括处理器,所述处理器与存储器耦合,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现权利要求1至4任一项权利要求所述的一种卫星的入轨速率阻尼方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现权利要求1至4任一项权利要求所述的一种卫星的入轨速率阻尼方法。
技术总结本发明公开了一种卫星的入轨速率阻尼方法、系统、设备和介质,涉及卫星姿态控制技术领域,方法包括:卫星配置具有二维矢量调节机构的电推进推力器,将其作为速率阻尼和轨道控制的执行机构;基于PID闭环控制原理,计算速率阻尼对应的期望控制力矩;根据二维矢量调节机构的转动范围,确定电推进推力器的力矩包络矢量群;根据期望控制力矩和力矩包络矢量群,对二维矢量调节机构的转动角度进行寻优分配,得到寻优结果;控制二维矢量调节机构按照寻优结果进行转动。本发明同时能够简化轨道控制时的卫星姿态调整需求,通过调节电推进推力矢量调节机构调整推力方向至轨道控制时所需的推力方向,工程实施可操作性强。技术研发人员:张安强,高恩宇,孔令波,黄繁荣,孙荣威受保护的技术使用者:北京微纳星空科技有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/222158.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表