预最佳拟合位置的拟合计算方法及系统与流程
- 国知局
- 2024-08-01 05:58:51
本发明涉及校准,具体地,涉及一种预最佳拟合位置的拟合计算方法及系统。
背景技术:
1、最佳拟合系统的作业类型从实际来看与之最相近的是校准作业,目前常见的校准作业方案主要有两种。
2、一是利用同类型的准确度高的标准仪器来校准。校准的时候,标准仪器和被校仪器同时测量由可调信号源输出的一个信号,标准仪器上的输出作为真值,它与被校仪器的测量值之间的差值即为被校仪器的测量误差。由小到大的改变信号源的输出,就可以获得在所有测量点上的校准值。二是采用准确度高的可步进调节输出值的标准信号源校准的时候,信号源的示值作为真值,它与被校仪器示值的差值就是该被校仪器的测量误差。从小到大调节标准信号源的输出,就可以得到被校仪器在所有的测量点上的校准值。
3、但以上二种方案都需由专业人员手动操作,使用极为不便。并且测量出需要进行校准的校准量还需要手动去操作,过程反复且复杂,可能最后校准的结果也与实际希望的理想结果偏差较大。另外校准的最后误差标准还需由计量检定部门给出误差修正表或使用额外的专门标准仪器进行辅助校准。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种预最佳拟合位置的拟合计算方法及系统。
2、根据本发明提供的一种预最佳拟合位置的拟合计算方法及系统,所述方案如下:
3、第一方面,提供了一种预最佳拟合位置的拟合计算方法,所述方法包括:
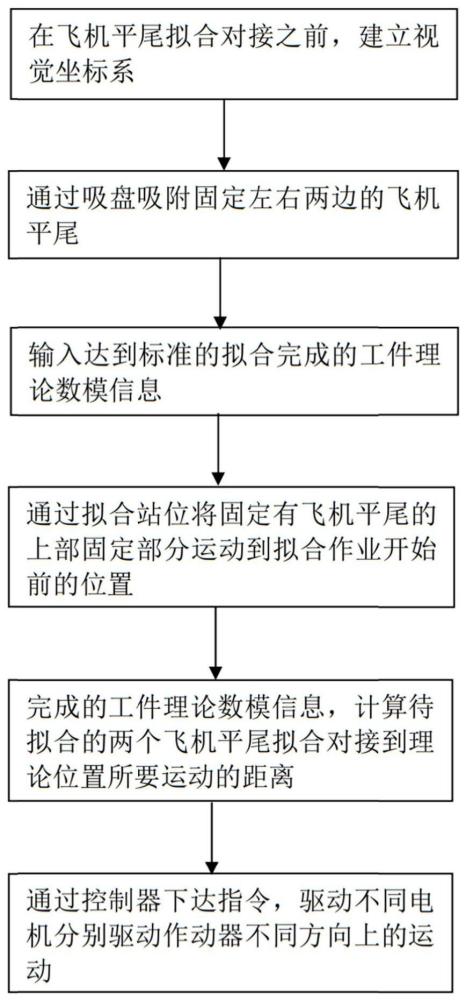
4、步骤s1:在飞机平尾拟合对接之前,建立视觉坐标系;
5、步骤s2:通过吸盘吸附固定左右两边的飞机平尾;
6、步骤s3:输入达到标准的拟合完成的工件理论数模信息;
7、步骤s4:通过拟合站位将固定有飞机平尾的上部固定部分运动到拟合作业开始前的位置;
8、步骤s5:收集两边飞机平尾上反射器所传达的坐标信息,并根据所述达到标准的拟合完成的工件理论数模信息,计算待拟合的两个飞机平尾拟合对接到理论位置在x、y、z三个方向上所要运动的距离;
9、步骤s6:通过控制器下达指令,驱动不同电机分别驱动作动器不同方向上的运动。
10、优选地,所述步骤s5中计算待拟合的两个飞机平尾拟合对接到理论位置在x、y、z三个方向上所要运动的距离包括:在测量到新的坐标即x,y,z三轴坐标后,与标准拟合的工件理论数模的坐标进行对比。
11、优选地,所述步骤s6中控制器将生成的指令方案传达给电机,驱动电机移动和调整作动器,使飞机水平尾翼到达该方案的理论位置。
12、优选地,所述步骤s6包括:从开始运动过程中,通过激光跟踪仪持续传达两边飞机平尾的坐标信息到控制器中并计算达到标准拟合的工件理论数模所需运动的距离,直到待拟合的两边飞机平尾达到标准的三维数模。
13、第二方面,提供了一种预最佳拟合位置的拟合计算系统,所述系统包括:
14、模块m1:在飞机平尾拟合对接之前,建立视觉坐标系;
15、模块m2:通过吸盘吸附固定左右两边的飞机平尾;
16、模块m3:输入达到标准的拟合完成的工件理论数模信息;
17、模块m4:通过拟合站位将固定有飞机平尾的上部固定部分运动到拟合作业开始前的位置;
18、模块m5:收集两边飞机平尾上反射器所传达的坐标信息,并根据所述达到标准的拟合完成的工件理论数模信息,计算待拟合的两个飞机平尾拟合对接到理论位置在x、y、z三个方向上所要运动的距离;
19、模块m6:通过控制器下达指令,驱动不同电机分别驱动作动器不同方向上的运动。
20、优选地,所述模块m5中计算待拟合的两个飞机平尾拟合对接到理论位置在x、y、z三个方向上所要运动的距离包括:在测量到新的坐标即x,y,z三轴坐标后,与标准拟合的工件理论数模的坐标进行对比。
21、优选地,所述模块m6中控制器将生成的指令方案传达给电机,驱动电机移动和调整作动器,使飞机水平尾翼到达该方案的理论位置。
22、优选地,所述模块m6包括:从开始运动过程中,通过激光跟踪仪持续传达两边飞机平尾的坐标信息到控制器中并计算达到标准拟合的工件理论数模所需运动的距离,直到待拟合的两边飞机平尾达到标准的三维数模。
23、第三方面,提供了一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现所述的预最佳拟合位置的拟合计算方法的步骤。
24、第四方面,提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被处理器执行时实现所述的预最佳拟合位置的拟合计算方法的步骤。
25、与现有技术相比,本发明具有如下的有益效果:
26、通过采用基于拟合算法的自动控制方式,解决了人工调整产品精密位置不断拟合接近的流程复杂反复的问题。
27、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
技术特征:1.一种预最佳拟合位置的拟合计算方法,其特征在于,包括:
2.根据权利要求1所述的预最佳拟合位置的拟合计算方法,其特征在于,所述步骤s5中计算待拟合的两个飞机平尾拟合对接到理论位置在x、y、z三个方向上所要运动的距离包括:在测量到新的坐标即x,y,z三轴坐标后,与标准拟合的工件理论数模的坐标进行对比;
3.根据权利要求1所述的预最佳拟合位置的拟合计算方法,其特征在于,所述步骤s6中控制器将生成的指令方案传达给电机,驱动电机移动和调整作动器,使飞机水平尾翼到达该方案的理论位置。
4.根据权利要求1所述的预最佳拟合位置的拟合计算方法,其特征在于,所述步骤s6包括:从开始运动过程中,通过激光跟踪仪持续传达两边飞机平尾的坐标信息到控制器中并计算达到标准拟合的工件理论数模所需运动的距离,直到待拟合的两边飞机平尾达到标准的三维数模。
5.一种预最佳拟合位置的拟合计算系统,其特征在于,包括:
6.根据权利要求5所述的预最佳拟合位置的拟合计算系统,其特征在于,所述模块m5中计算待拟合的两个飞机平尾拟合对接到理论位置在x、y、z三个方向上所要运动的距离包括:在测量到新的坐标即x,y,z三轴坐标后,与标准拟合的工件理论数模的坐标进行对比;
7.根据权利要求5所述的预最佳拟合位置的拟合计算系统,其特征在于,所述模块m6中控制器将生成的指令方案传达给电机,驱动电机移动和调整作动器,使飞机水平尾翼到达该方案的理论位置。
8.根据权利要求5所述的预最佳拟合位置的拟合计算系统,其特征在于,所述模块m6包括:从开始运动过程中,通过激光跟踪仪持续传达两边飞机平尾的坐标信息到控制器中并计算达到标准拟合的工件理论数模所需运动的距离,直到待拟合的两边飞机平尾达到标准的三维数模。
9.一种存储有计算机程序的计算机可读存储介质,其特征在于,所述计算机程序被处理器执行时实现权利要求1至4中任一项所述的预最佳拟合位置的拟合计算方法的步骤。
10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至4中任一项所述的预最佳拟合位置的拟合计算方法的步骤。
技术总结本发明提供了一种预最佳拟合位置的拟合计算方法及系统,包括:步骤S1:在飞机平尾拟合对接之前,建立视觉坐标系;步骤S2:通过吸盘吸附固定左右两边的飞机平尾;步骤S3:输入达到标准的拟合完成的工件理论数模信息;步骤S4:通过拟合站位将固定有飞机平尾的上部固定部分运动到拟合作业开始前的位置;步骤S5:收集两边飞机平尾上反射器所传达的坐标信息,并根据所述达到标准的拟合完成的工件理论数模信息,计算待拟合的两个飞机平尾拟合对接到理论位置在X、Y、Z三个方向上所要运动的距离;步骤S6:通过控制器下达指令,驱动不同电机分别驱动作动器不同方向上的运动。本发明能够解决人工调整产品精密位置不断拟合接近的流程复杂反复的问题。技术研发人员:李晶,桑成思,邹冀华,王启任,姜益昊,黄雪怡,刘晓东,陈辉,谢晨晨受保护的技术使用者:埃瑞泰克斯(上海)机械制造有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/222242.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表