一种主动抑制飞机机轮刹车振动的系统及抑制方法与流程
- 国知局
- 2024-08-01 06:01:35
本发明涉及飞机刹车领域,具体是一种主动抑制飞机机轮刹车振动的系统及方法。
背景技术:
1、机轮刹车系统是飞机的最重要的系统之一,在飞机的起飞和着陆过程中起着重要的作用。机轮刹车系统通过检测机轮的打滑状态调整刹车压力实现飞机的减速,但是防滑频率在起落架的固有频率范围内,则会引起起落架的共振。飞机低频振动引起飞行员的不适感以及安全。
2、公开号为cn 112861259 a的发明中公开了一种刹车控制抑制起落架振动的方法及装置。该发明通过建立刹车控制模型、确定性能指标函数、模型预测控制等步骤,通过起落架振动和刹车效率进行起落架抑制振动。但是该方法所涉及的参数较多,调整困难,并且要和防滑刹车控制方法进行集成,较为困难,而且并未对于低速滑行阶段的振动进行抑制。
3、公开号为cn 108343652 a的发明中公开了一种消除刹车系统试验中的液压振动方法。该发明通过外层管、中间层管、内层输油管,调节减振输油管的刚度,达到减振的目的;通过减振油管和安装减振托架,消除刹车系统试验过程中的振动。但是该发明中仅适用于系统试验过程中的减振,不适用于飞机实际刹车过程中的抑制起落架振动。
4、机轮刹车系统引起的低频振动伴随起落架走步以及转弯困难,其转弯困难是因为刹车振动导致两个机轮之间出现轮速差,激活轮间保护,导致转弯的时候内侧轮泄压,转弯半径增大。现有技术中,机轮刹车系统设计时主要考虑刹车效率,对于刹车过程中存在的起落架共振问题,缺乏主动抑制的设计方法。
技术实现思路
1、为克服现有技术中存在的由防滑频率与起落架的固有频率形成共振问题,以及两个起落架刹车力矩不同引起的航向振动的问题,本发明提出了一种主动抑制飞机刹车振动的系统及抑制方法。
2、本发明提出的主动抑制飞机机轮刹车振动的系统包括刹车控制器、起落架航向振动加速度传感器、起落架纵向振动加速度传感器、速度传感器和压力传感器。其中:所述刹车控制器的电信号输入端分别与起落架航向加速度传感器输出端、起落架纵向加速度传感器输出端、速度传感器的输出端、刹车压力传感器的输出端电气连接,分别接收起落架航向加速度传感器提供的起落架航向振动频率、起落架纵向加速度传感器提供的起落架纵向振动频率、速度传感器提供的机轮速度信号和飞机速度信号、压力传感器提供的刹车压力信号。
3、所述刹车控制器包含机轮速度异常判断及处理模块,速度分段模块,航向振动判断模块,纵向振动判断模块,压力计算模块。机轮速度异常判断及处理模块用于根据实际刹车压力和实际机轮速度分别与上一控制周期的刹车压力和上一控制周期的机轮速度进行比较,确定刹车压力变化时检测到的机轮速度是异常,如果异常则根据上一控制周期的机轮速度进行计算,如果正常则继续使用。航向振动判断模块用于根据航向振动频率确定飞机是否发生航向振动,作为压力计算模块的输入值;纵向振动判断模块用于根据纵向振动频率确定飞机是否发生纵向振动,作为压力计算模块的输入值;压力计算模块根据飞机的速度段、航向振动情况、纵向振动情况计算刹车压力。
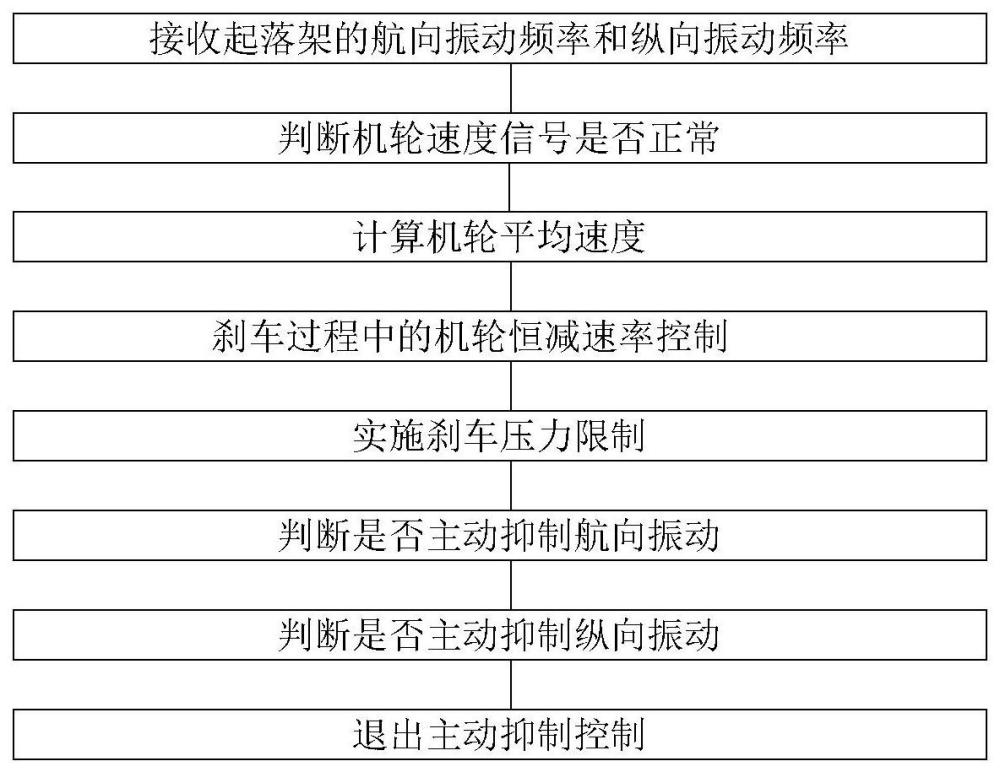
4、本发明提出的利用所述振动系统主动抑制飞机机轮刹车振动的具体过程是:
5、步骤一、接收起落架的航向振动频率和纵向振动频率:
6、刹车控制器接收通过起落架横向加速度传感器检测的航向振动频率,以及接收通过纵向加速度传感器检测的纵向振动频率。
7、步骤二、判断机轮速度信号是否正常:
8、所述机轮速度是否正常是指机轮速度传感器检测的机轮速度信号是否故障。
9、所述当前控制周期的机轮速度通过刹车控制器接收机轮速度传感器检测得到,该当前控制周期的机轮速度为v(n)。刹车控制器通过压力传感器检测到机轮当前控制周期的实际刹车压力;所述当前控制周期的实际刹车压力为p(n)。
10、通过公式(1)和(2)判断机轮速度信号是否正常:
11、|v(n)-v(n-1)|>δv1 (1)
12、|p(n)-p(n-1)|≤δp1 (2)
13、式中:v(n)为当前控制周期的机轮速度;v(n-1)为上一控制周期刻的机轮速度;δv1为速度差门限值;p(n)为当前控制周期的刹车压力;p(n-1)为上一控制周期的刹车压力;δp1为压力上升门限值。
14、在判断机轮速度信号是否正常时,如果当前控制周期的机轮速度v(n)满足公式(1),并且当前控制周期的实际刹车压力p(n)满足公式(2),则判断当前控制周期的机轮速度信号故障;反之,则判断当前控制周期的机轮速度信号正常。
15、步骤三、计算机轮平均速度:
16、通过公式(4)计算机轮平均速度vr(n):
17、
18、式中,vr(n)为当前控制周期的机轮平均速度;v(n)为当前控制周期的机轮速度;v(n-1)为上一控制周期的机轮速度;v(n-2)为前两个控制周期的机轮速度;v(n-3)为前三个控制周期的机轮速度;v(n-4)为前四个控制周期的机轮速度。
19、若判断机轮速度信号正常,则当前控制周期的机轮速度不变。若判断机轮速度信号故障,通过公式(3)计算当前控制周期的机轮速度:
20、v(n)=v(n-1)+δv2 (3)
21、式中,δv2为校准速度门限值。
22、当刹车压力上升时,校准速度门限值δv2为负值;当刹车压力下降时,较准速度门限值δv2为正值。
23、步骤四、刹车过程中的机轮恒减速率控制:
24、当开始实施刹车时,刹车压力从0开始上升,机轮开始减速。通过公式(5)计算机轮减速率δvr。
25、δvr=vr(n)-vr(n-1) (5)
26、式中,vr(n)为当前控制周期的机轮平均速度,vr(n-1)为上一控制周期的机轮平均速度。
27、如果检测到机轮减速率<机轮减速率门限值,即δvr<δv0,则刹车压力根据预设的上升斜率k1进行增加;如果检测到机轮减速率≥机轮减速率门限值并且<限制力矩机轮减速率门限值,即δv0≤δvr<δv1,则刹车压力不变;如果检测到机轮减速率≥限值力矩机轮减速率门限值,即δv1<δvr,则刹车压力为上一控制周期的50%。
28、所述的δv0为机轮减速率门限值;δv1为限制力矩机轮减速率门限值。
29、步骤五、实施刹车压力限制:
30、所述刹车过程中,将飞机的滑行速度划分为两个速度区间进行压力限制,以避免飞机振动。
31、刹车控制器接收飞机速度va。通过公式(6)和(7)进行速度区间划分判断是否实施刹车压力限制:
32、v1≤va<v2 (6)
33、v2≤va<v3 (7)
34、式中,v1为第一速度区间的速度下限值,v2为第一速度区间的速度上限值,v3为第二速度区间的速度上限值。
35、如果飞机速度va满足公式(6),则刹车控制器输出的刹车压力<第一速度区间的压力上限p1;如果飞机速度满足公式(7),则刹车控制器输出的刹车压力<第二速度区间的压力上限p2;如果既不满足公式(6)也不满足公式(7),则刹车控制器不限制刹车压力。
36、所述的p1为第一速度区间的压力上限,p2为第二速度区间的压力上限。
37、步骤六、判断是否主动抑制航向振动:
38、在刹车过程中,通过刹车控制器接收起落架航向振动频率fa。如果航向振动频率fa>航向振动频率门限值fac,则释放刹车压力,以主动抑制航向振动;反之,则继续实施刹车,无需进行主动抑制航向振动。
39、步骤七、判断是否主动抑制纵向振动;
40、在所述刹车过程中,刹车控制器接收起落架纵向振动频率fv。如果航向振动频率fv>航向振动频率门限值fvc时,则刹车压力降低为上一控制周期的刹车压力的50%;反之,则继续实施刹车,无需进行主动抑制纵向振动。
41、步骤八,退出主动抑制控制:
42、通过各机轮速度传感器分别发送机轮速度。当刹车控制器接收的各机轮速度均为0时,判断飞机刹停,刹车控制器退出主动抑制控制。至此,完成飞机刹车过程中的飞机机轮振动的主动抑制。
43、与现有技术相比,本发明的有益效果为:
44、通过对机轮速度是否突变进行判断,以避免由于机轮速度突变导致的不对称刹车压力引起的起落架航向振动以及转弯困难的问题。通过对飞机低速滑行速度进行速度分段,根据分段的速度进行刹车压力限制,避免了低速时飞机的纵向振动问题,低速阶段的振动概率降低了1e-4。在飞机高速段根据刹车力矩特性制定机轮的减速率控制范围,控制刹车压力实现恒力矩的控制目的,避免了由于力矩变化引起在飞机高速刹车阶段由于防滑引起的刹车振动。在机轮刹车系统中增加纵向加速度传感器和航向加速度传感器,根据航向振动频率和纵向振动频率信号,对刹车压力进行限制已确保全刹车过程中不会出现由于刹车引起的振动。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222482.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表