一种无人机及变电站巡检航线规划避障系统的制作方法
- 国知局
- 2024-08-01 06:02:01
本发明涉及无人机,具体而言,涉及一种无人机及变电站巡检航线规划避障系统。
背景技术:
1、无人机一种无人驾驶的飞行器,通过无线电遥控设备和自备的程序控制装置进行操纵。无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。
2、在无人机飞行过程中,启动四个或者多个电机,带动桨叶进行旋转,为升降过程中的无人机提供动力,实现飞行操作,而无人机在飞行降落过程中,由于缺乏有效的缓冲结构,其重力在下降过程中会产生较大的冲击力,这会影响无人机降落地面的稳定性。
3、例如:中国发明专利(申请号:cn113002790a)所公开的“一种飞行器用缓冲装置”,其说明书公开:现在市场上的无人驾驶飞行器缓冲装置当装置进行降落时,由于夜间视线模糊容易撞击到建筑物,没有很好地警示结构防止车辆行人靠近装置,无人机升降时的稳定性较差,使得无人机受重力影响容易导致结构损坏,同时装置内部容易由于湿空气影响发生生锈老化的情况,使得装置使用寿命较短,不便于针对不同底部规格的无人机选择需求的安装结构,安装结构复杂;上述专利可以佐证现有技术存在的缺陷。
4、因此我们对此做出改进,提出一种无人机及变电站巡检航线规划避障系统。
技术实现思路
1、本发明的目的在于:针对无人机在飞行降落过程中,由于缺乏有效的缓冲结构,其重力在下降过程中会产生较大的冲击力,这会影响无人机降落地面的稳定性。
2、为了实现上述发明目的,本发明提供了以下无人机及变电站巡检航线规划避障系统,以改善上述问题。
3、本申请具体是这样的:
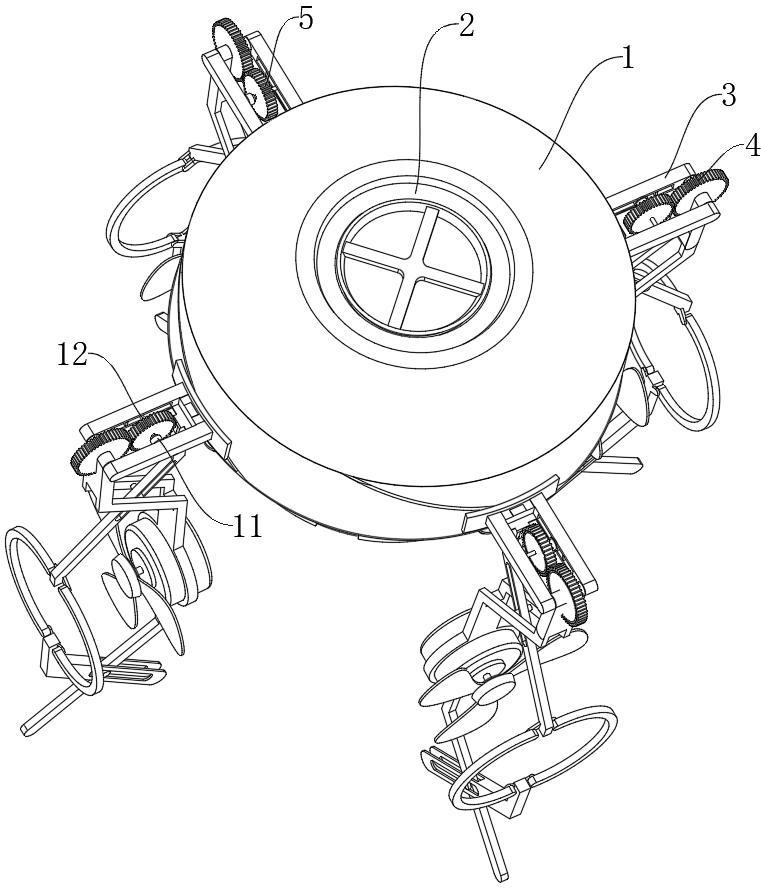
4、一种无人机,包括外壳,所述外壳内壁设有倾斜缓冲组件,所述外壳下方设有飞行保护组件,所述外壳外壁设有防护组件;
5、所述倾斜缓冲组件包括呈圆周均匀分布设在外壳外壁的四个弧形槽,所述弧形槽内壁活动连接有斜杆,四个所述斜杆中间固定连接有限位环,所述限位环内壁活动连接有外槽环,所述外槽环内壁固定连接有固定板,所述固定板中间固定连接有轴承,所述轴承内圈上方固定连接有弹簧伸缩杆。
6、作为本申请优选的技术方案,所述防护组件包括固定安装在轴承外圈下方的延伸杆,所述延伸杆下方贯穿外壳固定连接有充电接口,所述充电接口外壁呈圆周均匀分布固定连接有若干个弹性扇板,若干个所述弹性扇板相邻之间均固定连接有布料,所述弹性扇板上方一侧固定连接有辅助旋转架,所述辅助旋转架另一端活动连接有铁杆,所述外槽环下方设有电磁铁环,所述电磁铁环与若干个所述铁杆活动连接。
7、作为本申请优选的技术方案,所述飞行保护组件包括固定安装在斜杆贯穿弧形槽一端的弧形板,所述弧形板侧面固定连接有槽架,所述槽架内壁活动连接有第一曲杆,所述第一曲杆内壁设有曲槽,所述曲槽内壁固定连接有第一滑杆,所述槽架下方固定连接有第一旋转架,所述第一旋转架另一端活动连接有连杆,所述连杆另一端活动连接有第二旋转架,所述第二旋转架另一端活动连接有第二曲杆,所述第二曲杆表面设有侧槽,所述侧槽内壁与第一滑杆活动连接,所述第二曲杆另一端呈对称均匀分布固定连接有两个定位旋转架,所述定位旋转架另一端活动连接有弹性弧杆,所述弹性弧杆下方固定连接有支撑组件。
8、作为本申请优选的技术方案,所述第一曲杆另一端固定连接有定位板,所述定位板中间固定连接有驱动电机,所述驱动电机输出轴端固定连接有扇叶。
9、作为本申请优选的技术方案,所述支撑组件包括活动安装在同一侧两个弹性弧杆另一端的内槽杆,所述内槽杆表面设有滑动槽,所述定位板另一端固定连接有第三曲杆,所述第三曲杆表面固定连接有第二滑杆,所述滑动槽与所述第二滑杆活动连接。
10、一种变电站巡检航线规划避障系统,包括以下组件:
11、高精度传感器:采用更先进的激光传感器,提高障碍物检测的精度和范围;
12、智能航线规划算法:该算法基于深度学习技术,能够根据实时环境数据和历史巡检数据自动生成最佳巡检路线;
13、快速控制系统:采用高速处理器和优化算法,实现无人机飞行轨迹的快速调整;
14、高效通信模块:采用超宽带通信技术,实现无人机与地面控制站之间的高速数据传输。
15、作为本申请优选的技术方案,所述传感器能够实时获取无人机周围环境的详细信息,并将数据传输给智能航线规划算法。
16、作为本申请优选的技术方案,所述智能航线规划算法具有自适应学习能力,可根据不同变电站的实际情况进行智能调整,提高航线规划的准确性和效率。
17、作为本申请优选的技术方案,所述快速控制系统能够根据智能航线规划算法的指令,迅速控制无人机的飞行轨迹,确保无人机按照最佳路线进行巡检。
18、作为本申请优选的技术方案,所述高效通信模块能够实时传输传感器数据与航线规划结果,确保无人机与地面控制站之间的实时通信。
19、与现有技术相比,本发明的有益效果:
20、在本申请的方案中:
21、1.为了解决现有技术中无人机在飞行降落过程中,由于缺乏有效的缓冲结构,其重力在下降过程中会产生较大的冲击力,这会影响无人机降落地面稳定性的问题,本申请通过弹性伸缩杆、斜杆与弧形槽,以斜杆在弧形槽之中倾斜升降运动,而对降落过程中的冲击力进行缓冲,且配合弹簧伸缩杆,进行弹性缓冲,从而能够对无人机降落过程中的冲击力以弹性与斜向卸力的方向进行分解,以提高其无人机降落地面的稳定性;
22、2.本申请通过电磁铁环、铁杆、弹性扇板与布料,在无人机失去动力,其弹性扇板便向下翻转,与布料相互配合,形成半球状结构,以此增加其无人机下降过程中与空气产生的阻力,降低无人机下降的速度;
23、3.本申请通过其弹性弧板与延伸杆相互配合,为降落提供一个稳定的底座,而在动力失去后,其弹性弧板在布料的辅助下,形成半球状结构,增加无人机坠落与空气产生的阻力,使其由底座支撑结构切换为半球状结构,改变其保护方式;
24、4.通过设置的第一曲杆、第二曲杆与弹性弧杆,在第一曲杆与第二曲杆之间的距离被机臂展开后逐渐拉近,而使得弹性弧杆处于扇叶周围,从而能够为飞行过程中的扇叶进行防护,增加无人机飞行的安全性;
25、5.通过设置的第三曲杆、内槽杆与弹性弧杆,其第三曲杆和内槽杆之间形成的交叉结构与地面接触后,便对弹性弧杆进行挤压,以此对无人机降落过程的支撑保护,防止其电机与外壳直接接触地面,而造成整体结构的损坏;
26、6、通过在飞行过程中,其弹性弧杆便带动处于扇叶的周围,以此为飞行过程进行防护,而在失去动力后,其弹性弧杆脱离扇叶的周围,与第三曲杆相互配合,其弹性弧杆变为弹性缓冲结构,使其在防护结构切换为缓冲结构。
技术特征:1.一种无人机,其特征在于,包括外壳(1),所述外壳(1)内壁设有倾斜缓冲组件(2),所述外壳(1)下方设有飞行保护组件(3),所述外壳(1)外壁设有防护组件(6);
2.根据权利要求1所述的一种无人机,其特征在于,所述防护组件(6)包括固定安装在轴承(207)外圈下方的延伸杆(602),所述延伸杆(602)下方贯穿外壳(1)固定连接有充电接口(603),所述充电接口(603)外壁呈圆周均匀分布固定连接有若干个弹性扇板(606),若干个所述弹性扇板(606)相邻之间均固定连接有布料(608),所述弹性扇板(606)上方一侧固定连接有辅助旋转架(604),所述辅助旋转架(604)另一端活动连接有铁杆(605),所述外槽环(209)下方设有电磁铁环(601),所述电磁铁环(601)与若干个所述铁杆(605)活动连接。
3.根据权利要求1所述的一种无人机,其特征在于,所述飞行保护组件(3)包括固定安装在斜杆(211)贯穿弧形槽(205)一端的弧形板(206),所述弧形板(206)侧面固定连接有槽架(301),所述槽架(301)内壁活动连接有第一曲杆(302),所述第一曲杆(302)内壁设有曲槽(303),所述曲槽(303)内壁固定连接有第一滑杆(312),所述槽架(301)下方固定连接有第一旋转架(304),所述第一旋转架(304)另一端活动连接有连杆(305),所述连杆(305)另一端活动连接有第二旋转架(306),所述第二旋转架(306)另一端活动连接有第二曲杆(307),所述第二曲杆(307)表面设有侧槽(308),所述侧槽(308)内壁与第一滑杆(312)活动连接,所述第二曲杆(307)另一端呈对称均匀分布固定连接有两个定位旋转架(309),所述定位旋转架(309)另一端活动连接有弹性弧杆(310),所述弹性弧杆(310)下方固定连接有支撑组件(7)。
4.根据权利要求3所述的一种无人机,其特征在于,所述第一曲杆(302)另一端固定连接有定位板(311),所述定位板(311)中间固定连接有驱动电机(13),所述驱动电机(13)输出轴端固定连接有扇叶(8)。
5.根据权利要求4所述的一种无人机,其特征在于,所述支撑组件(7)包括活动安装在同一侧两个弹性弧杆(310)另一端的内槽杆(701),所述内槽杆(701)表面设有滑动槽(704),所述定位板(311)另一端固定连接有第三曲杆(702),所述第三曲杆(702)表面固定连接有第二滑杆(703),所述滑动槽(704)与所述第二滑杆(703)活动连接。
6.一种变电站巡检航线规划避障系统,使用如权利要求5所述的无人机,其特征在于,包括以下组件:
7.根据权利要求6所述的一种变电站巡检航线规划避障系统,其特征在于,所述传感器能够实时获取无人机周围环境的详细信息,并将数据传输给智能航线规划算法。
8.根据权利要求7所述的一种变电站巡检航线规划避障系统,其特征在于,所述智能航线规划算法具有自适应学习能力,可根据不同变电站的实际情况进行智能调整,提高航线规划的准确性和效率。
9.根据权利要求8所述的一种变电站巡检航线规划避障系统,其特征在于,所述快速控制系统能够根据智能航线规划算法的指令,迅速控制无人机的飞行轨迹,确保无人机按照最佳路线进行巡检。
10.根据权利要求9所述的一种变电站巡检航线规划避障系统,其特征在于,所述高效通信模块能够实时传输传感器数据与航线规划结果,确保无人机与地面控制站之间的实时通信。
技术总结本申请提供了一种无人机及变电站巡检航线规划避障系统,包括外壳,所述外壳内壁设有倾斜缓冲组件,所述外壳下方设有飞行保护组件,所述倾斜缓冲组件包括呈圆周均匀分布设在外壳外壁的四个弧形槽,所述弧形槽内壁活动连接有斜杆,四个所述斜杆中间固定连接有限位环,所述限位环内壁活动连接有外槽环,所述外槽环内壁固定连接有固定板。本申请通过弹性伸缩杆、斜杆与弧形槽,以斜杆在弧形槽之中倾斜升降运动,而对降落过程中的冲击力进行缓冲,且配合弹簧伸缩杆,进行弹性缓冲,从而能够对无人机降落过程中的冲击力以弹性与斜向卸力的方向进行分解,以提高其无人机降落地面的稳定性。技术研发人员:孙权,黄小青,胡延宝受保护的技术使用者:中飞赛维智能科技股份有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/222507.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表