一种大规模异构星座连续观测目标的控制方法及装置与流程
- 国知局
- 2024-08-01 06:03:10
本发明属于卫星控制,尤其涉及一种大规模异构星座连续观测目标的控制方法及装置。
背景技术:
1、随着航天对地观测技术和卫星系统技术的发展,对地观测类卫星由单星单一载荷、单一功能向单星综合载荷、一体化孔径多功能发展,卫星星座由单一类型载荷组成的单一功能星座向多种载荷混合卫星编队的多功能星座发展。中国高分专项对地观测卫星星座已包含可见光、多光谱、高光谱、sar成像等多载荷类型的卫星,形成综合观测卫星星座。
2、卫星研制生产方面,随着卫星平台技术和载荷技术都朝着模块化的方向发展,卫星平台和卫星观测载荷逐渐由一体化设计、一体化制造的方式向着平台、载荷解耦设计、分别制造、插拔式的方向发展。美国太空太空探索技术公司(spacex)在在星链卫星2.0平台的基础上,将载荷接口进行开放式标准化,支持对不同传感器(如可见光、红外、sar)等不同观测载荷的挂载,实现卫星平台和卫星载荷的标准化组装,大大提升了星座的综合化观测能力形成。
3、卫星在轨处理方面,随着在轨cpu、gpu、npu、fpga、dsp等处理资源和ddr、flash、ssd等存储资源的日渐丰富,对地观测卫星逐步具备在轨数据预处理、处理、目标提取、目标识别等能力,具备对海上目标在轨发现、识别的能力,尤其是随着人工智能技术的发展,在轨目标识别与解译水平显著提高。
4、卫星星间通信方面,随着星间激光、微波技术的日益成熟,多个卫星星座的异轨之间逐渐具备信息传输与任务协同的能力,大大提升了异构星座的信息在轨协同、目标融合、目标关联等能力形成。
5、综上,随着卫星在星座规模、载荷能力、在轨处理、星间通信等方面均发生了巨大的进步和发展,未来对地观测类卫星针对海上移动目标的观测、发现、确认、跟踪的时敏能力将大大提升,能够支撑实时性要求较高的观测任务。现有对地观测类卫星星座的运用流程包括:地面提报观测需求,生成观测区域;地面规划满足观测区域和过境窗口条件的卫星,进一步筛选卫星的测控资源和数传资源,生成观测计划;测控上传观测需求,同步安排数据下传链路资源,形成数据下传计划;卫星按照观测计划实施观测,完成后将原始数据或在轨处理后数据根据数据下传计划进行传输;地面处理系统接收下传数据进行数据处理,生成信息产品用于决策;决策后生成新的观测需求,重复上述步骤实施对目标的新一轮观测。
6、传统基于地面测控和数传的规划方法,由于现有卫星的星间链路尚未建立,测控和数传通过地面站网星地控制,预先生成观测计划,待目标卫星经过测控站测控范围时进行观测指令上注,待观测任务完成后,卫星进入数传接收站的接收范围时,将数据进行下传,完成整个观测任务。随着星间链路、网络路由和高低轨通信链路等技术的发展,未来测控、数传将不再受制于地面站网的布局约束,可以通过高低轨的“星-星-地”链路、低轨的接续星间网络路由完成在轨自动生成任务并实施观测,并自动将观测结果分发给其他卫星进行二次、多次拍摄,实现对海上动目标的高时敏性连续观测。
7、但是,在传统星地延时指令上注、延时数据下传的卫星控制架构下,尚未发展卫星在轨自主任务筹划的成熟技术和相关装备装置,面向未来星间链路通畅、高低轨链路互联形成星间实时通联的大规模异构星座自主控制和连续观测,当前技术仍存在以下缺陷:
8、现有规划技术是根据地面人工生成,尚不具备自主生成规划任务的能力;
9、现有技术重点在轨获取需求区域后如何快速规划最有效的资源进行观测,不具备自主从任务规划生成到观测任务执行的循环自主迭代运行的机制;
10、现有技术难以适应海上高时敏运动目标的连续观测安排,即便在网络通联性具备的条件下,依然难以摆脱人在回路的控制,面向海上运动目标,无法形成非人工干预的大规模星座自主规划与连续跟踪能力。
技术实现思路
1、有鉴于此,本发明旨在面向未来大规模异构星座面向海上运动目标观测的需求,在星间传输链路畅通、不受地面站网分布条件约束的情况下,提出一种自主控制、非人工干预的海上运动目标连续跟踪观测的流程机理与方法装置,降低星座在对地观测任务过程中的人力投入,通过对被观测目标的连续任务规划和目标运动轨迹预测,形成对目标连续观测和跟踪的自主维持,形成对运动目标的自主化连续跟踪,提高对目标的持续观测能力和持续跟踪能力。
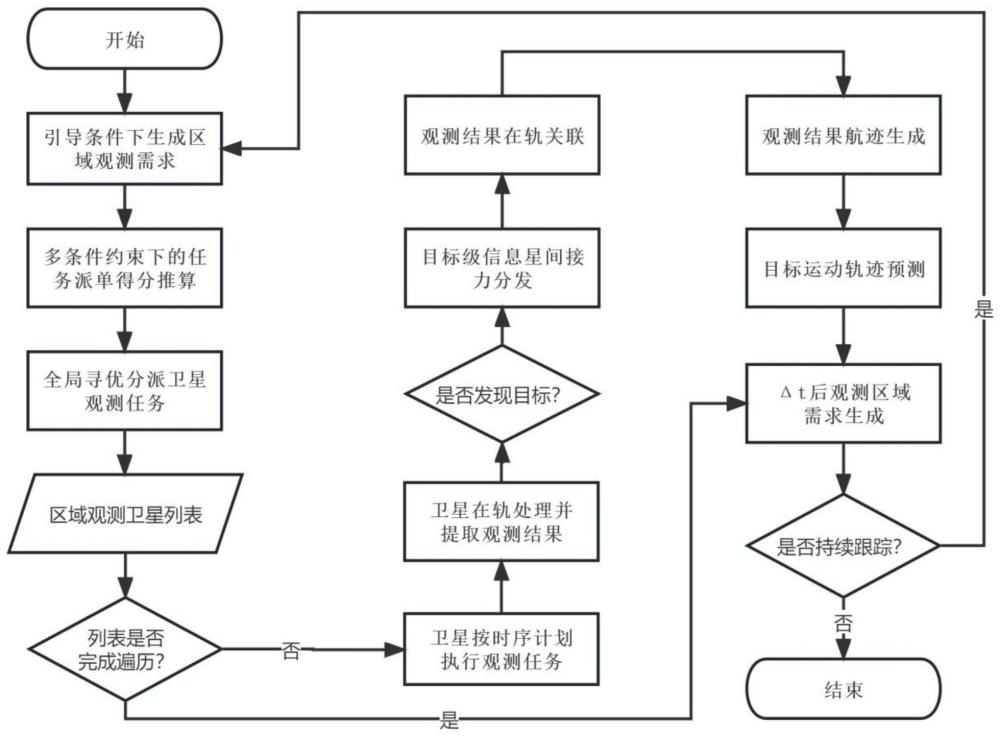
2、本技术围绕分布式异构大规模星座连续观测海上移动目标,提出目标发现、属性确认、轨迹预测、连续跟踪的多模式分布式自主控制与连续跟踪方法,主要包括:1、目标观测模型构建;2、目标观测任务自主生成;3、任务导向的卫星自主规划;4、单星在轨数据处理及目标提取;5、多星区域组网关联融合;6、星上目标轨迹预测与星间分发;7、未来时刻的观测需求二次生成。通过上述步骤的循环迭代,实现大规模星座对海上移动目标的连续观测、确认和跟踪。最后提供一个软件装置用于在轨部署、任务分配和数据处理。
3、具体地,本技术第一方面公开的大规模异构星座连续观测目标的控制方法,包括以下步骤:
4、设置影响观测目标的挣值的影响因子,包括轨道因子o、幅宽因子a、天气因子w、辐射因子ra、光照因子s、分辨率因子re、精度因子p、工作模式m,将所述影响因子综合描述当前卫星对未来δt时刻以后在s区域位置开展目标观测的挣值得分;
5、将全球待观测的区域以格网的形式进行剖分,根据区域观测的权重进行格网赋值加权,格网的尺度根据需求的颗粒度进行缩放,最终根据需求的高低和紧迫性对格网进行加权赋值,根据赋值高低生成需求列表;
6、根据格网生成的需求列表,建立大规模星座获得观测任务抢单得分机制,根据观测任务的类型对工作模式m进行筛选;
7、每颗卫星执行完观测任务后,在轨开展数据处理与目标提取任务,得到目标的属性、类别、经纬度、置信度信息;
8、围绕观测目标,区域星群根据星间互联条件,建立接续关联融合方法,进行多星区域组网关联融合;
9、在星上开展目标的行动轨迹预测,通过时空偏差阈值约束的方法对持续获取的目标点位进行轨迹拟合,并利用历史轨迹数据对当前目标进行关联验证,开展目标运动轨迹的预测,为目标在未来δt时间后的位置和置信度提供预测结果输出,并通过通信链路对预测结果进行星地、星空、星间信息分发,生成对未来某时间后船只可能出现的区域,以该区域s和当前到未来某时刻的时间间距δt为输入,自动触发后续接续观测任务,实现星上自主引导规划生成;
10、其他卫星节点根据δt时间后的预测位置重启区域规划,重新调度满足条件的卫星开展二次目标观测与跟踪。
11、进一步地,所述挣值得分表示为:
12、es(δt,s)=f(c(o,a,δt,s),w,ra,s,re,p,m)
13、其中,e(δt,s)指当前卫星在δt时刻后针对区域s的观测挣值,该值的高低是评价当前卫星传感器是否适合执行该任务的评价指标;
14、f是与轨道因子o、幅宽因子a、天气因子w、辐射因子ra、光照因子s、分辨率因子re、精度因子p、拍摄模式m7个变量相关的线性加权函数,该函数模型代表当前卫星受上述因子影响下的观测挣值得分高低,具体表现为:
15、
16、其中,wi为加权系数,
17、c是指与轨道因子o、幅宽因子a,以及δt、区域s相关的覆盖度函数,核心描述当前卫星在δt时刻后对于区域s的观测覆盖状况;
18、o为轨道因子,以轨道6根数形式描述卫星所在轨道;
19、a为幅宽因子,包含聚束、推扫、侦收、侧视、聚束多种模式,每种模式的幅宽结果与天线的角度相关;
20、w为天气因子,描述s区域的天气状况,每种天气状况对不同类型传感器感知电磁波的传输衰减各异,针对不同的传感器,w不同天气下的因子影响权重各异;
21、ra为辐射因子,描述s区域内的有源辐射的信号类型与信号强弱,针对不同的辐射特性各种传感器的电磁接收结果不同;
22、s为光照因子,描述一天不同时间段星下点位置的太阳辐射地球表面的能量状态,不同传感器接收太阳辐射能量的程度不同,受太阳光辐射强弱的影响各异;
23、re为分辨率因子,表示各传感器探测目标的空间分辨率,是描述目标最小尺度的指标因子;
24、p为精度因子,表示观测结果与目标实际位置的误差值,是描述目标位置准确度的指标因子;
25、m为工作模式,表示不同传感器根据观测特性差异所呈现的多种工作模式,对于具有大范围侦收或者探测目标能力的传感器,用于搜索发现目标,对于小范围成像的传感器,用于其它信息引导下的二次成像识别,对目标的属性、类别信息进行确认。
26、更进一步地,所述工作模式分为三种:
27、一是广域搜索,通过主动雷达、或被动信号侦收形式大范围对陆海特定区域进行扫描,首先获取目标的大致方位,完成对目标的发现;
28、二是定向成像确认,即在具备先验信息条件下开展对小规模区域的成像观测,然后对目标进行类别确认,具备为第三方用户提供准确类别、位置信息的能力;
29、三是对固定设施进行定时观测,在轨进行地物分类和变化检测,通过发现同一区域不同时间的设施、目标变化判断区域的态势和目标意图。
30、更进一步地,所述接续关联融合方法为星型、串型、网状三种信息汇聚手段;所述星型汇聚方法是从星座的区域星群中临机选择一颗星为主星,周边开展拍摄任务的卫星将目标信息同时段汇聚给主星,由主星开展在轨多源数据的关联、合批工作,待多源数据关联融合后,由主星或者通信卫星节点将目标观测结果向用户端进行分发;
31、串型汇聚方法是利用接力的方式,由前序卫星将积累的目标结果接力传递给后一颗卫星,在此过程中,通过每一颗参与观测卫星的目标信息的融合,使得目标的位置精度、置信度逐渐提升,持续向用户进行分发;
32、网状汇聚方式是星群在区域构建务中心的网状结构,每一颗卫星进行广播分发,各自开展面向目标的关联融合,融合后的信息再进一步广播,持续提升目标的信息置信度。
33、本技术第二方面公开的大规模异构星座连续观测目标的控制装置,包括数据接入模块、数据关联模块、目标轨迹预测模块、传感器控制模块、任务控制模块、观测挣值计算模块、时空匹配模块;数据接入模块接受其他临近卫星节点在轨处理生成的目标、切片、点位数据,还接收传感器控制模块发送的本卫星节点在轨观测的目标切片结果,然后输出目标属性到数据关联处理模块,数据关联处理模块输出目标点位序列到目标轨迹预测模块中,目标轨迹预测模块根据连续获取的目标点位时序数据,利用lstm算法计算预计的目标点位序列和运动方向,根据当前的目标点位序列和预计的目标点位序列的差值,确定跟踪拍摄区的阈值,基于该阈值生成未来δt时间后观测区域多边形s;
34、当前观测节点卫星将新的观测区域s作为下一次跟踪观测的新需求分发给决策卫星节点的时空匹配模块,时空匹配模块利用c(o,a,δt,s)算法函数将任务进行时空匹配后,得到满足观测条件的观测节点卫星列表,并向该列表中的卫星节点分发观测需求;
35、观测需求由决策星发送至各观测节点后,观测需求输入到观测挣值计算模块,观测挣值计算模块利用es(δt,s)生成自身节点的观测挣值;
36、所有观测节点星将观测挣值结果返回给决策节点星,由决策节点星比较星群的挣值排序。根据挣值排序结果,决策节点星对观测任务进行分配,将δt后的观测任务分配给观测挣值得分最高的观测节点星;
37、得到新观测任务的观测节点星触发观测任务准备,将观测需求发送到任务控制模块,任务控制模块驱动传感器按计划实施观测任务,调度传感器进行在轨观测,以及调度数据处理模块进行在轨观测结果计算分析。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222610.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。