一种供热管网巡检无人机的制作方法
- 国知局
- 2024-08-01 06:08:25
本技术涉及巡检无人机,具体涉及一种供热管网巡检无人机。
背景技术:
1、在供热管网中,有些输送介质为压力1.6mpa、温度300℃的过热蒸汽,而且主干网管道大部分管道架设在水库边或山坡上。平时的巡检工作主要依靠人工来完成,不仅费时费力,还会被蚊虫叮咬,甚至有蛇类出没,需要时刻防范。而且如果碰到涨水的情况,人工巡检存在着落水的风险,也可能部分地方积水过多导致人员根本无法靠近管道,无法正常完成巡检。
技术实现思路
1、本实用新型的目的在于克服上述存在的问题,提供一种供热管网巡检无人机,该供热管网巡检无人机可以自动对管道进行巡检,大大降低工人劳动量,还可以提高巡检效率。
2、本实用新型的目的通过以下技术方案实现:
3、一种供热管网巡检无人机,包括检测模块、无人机本体以及行走机构;
4、所述检测模块设置在无人机本体或行走机构上;
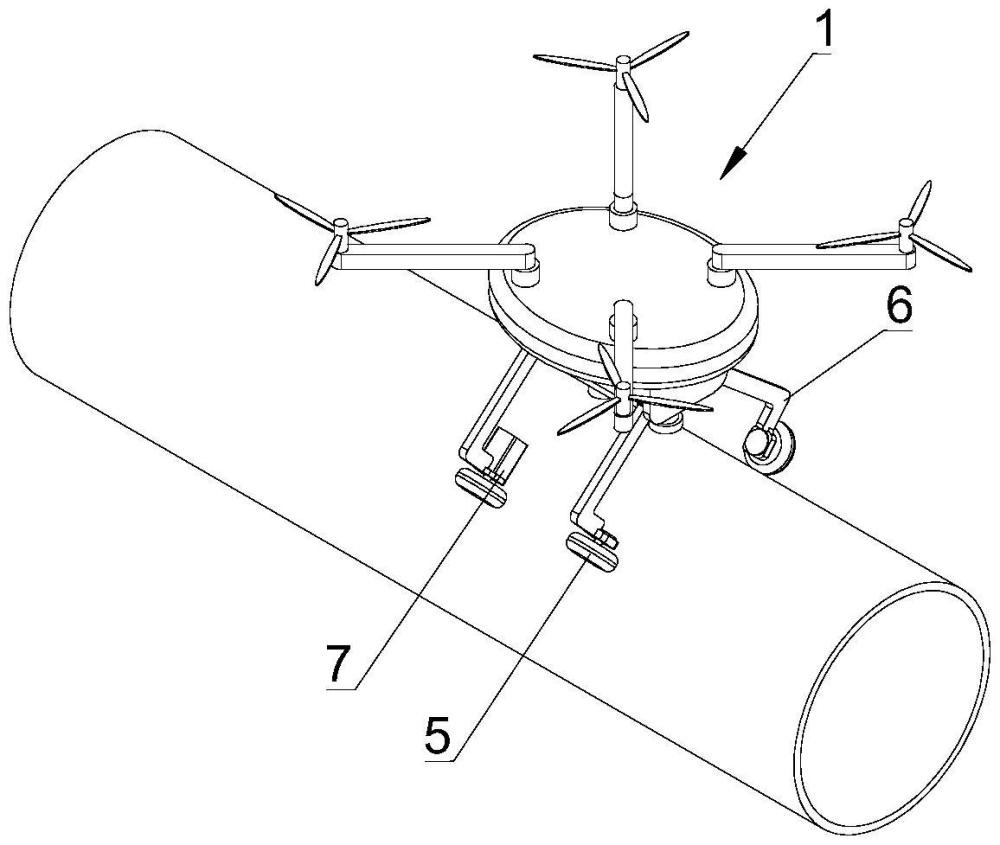
5、所述行走机构包括安装盒、行走组件、行走驱动机构以及伸缩驱动机构;所述安装盒固定在无人机本体的底部;所述行走组件设有两组,每组行走组件均包括行走轮和行走脚架,所述行走轮转动连接在行走脚架的一端,所述行走脚架的另一端转动连接在安装盒中;所述行走驱动机构的驱动端与行走轮连接;所述伸缩驱动机构的驱动端与行走脚架连接;所述行走脚架的摆动平面与管道的轴线垂直。
6、上述供热管网巡检无人机的工作原理为:
7、工作时,通过后台的工作人员遥控无人机本体在管道的上方飞行,即可透过检测模块远程检测管道的情况,实现飞行巡检。其中,如果有树木等阻挡,飞行检测可能受到阻碍,或者有些检测项目需要贴近管道进行检测,则需要无人机本体降落到管道上;通过伸缩驱动机构驱动两组行走脚架往下摆动指定角度(在巡检工作前,可以将无人机本体放置在管道上,调节两组行走脚架以获得合适的跨度,记录当前行走脚架的角度,以便后续作为参考),遥控无人机本体移动至管道的正上方,使无人机本体逐渐下降,直至行走轮接触到管道的外侧面,无人机本体停止飞行的动力;通过行走驱动机构驱动行走轮进行转动,从而可以沿着管道行走,实现行走巡检。
8、进一步,当无人机本体返航降落时,通过伸缩驱动机构驱动两组行走脚架往上摆动,直至行走轮的轴线水平,此时的行走机构作为无人机本体的降落架使用,十分灵活。
9、本实用新型的一个优选方案,其中,所述检测模块包括视觉检测器或红外热成像仪或超声探伤器。由于输送蒸汽的管道,管道温度会有特定的特点,如果发生泄露,会导致局部温度异常等,因此可以通过红外热成像仪进行检测,还可以贴近管道进行超声探伤检测。
10、本实用新型的一个优选方案,其中,所述检测模块设置在行走机构的安装盒上。
11、本实用新型的一个优选方案,其中,同一组行走组件的行走轮和行走脚架均设有两个;两个行走脚架平行设置。
12、进一步,所述行走驱动机构的驱动端与同一组的其中一个行走轮连接。
13、本实用新型的一个优选方案,其中,所述行走驱动机构包括行走驱动电机,该行走驱动电机的壳体固定在行走脚架上,该行走驱动电机的输出轴与所述行走轮连接。
14、本实用新型的一个优选方案,其中,所述伸缩驱动机构包括伸缩驱动电机和伸缩传动组件;所述伸缩驱动电机设置在安装盒中;所述伸缩传动组件包括两个相互啮合的传动齿轮,其中一个传动齿轮与伸缩驱动电机的输出轴连接,另一个传动齿轮与行走脚架连接。通过上述结构,在伸缩驱动电机的驱动下,行走脚架可以进行摆动,以便将行走轮抬起或放下。
15、进一步,所述伸缩传动组件还包括同步带和两个同步轮,其中一个同步轮与伸缩驱动电机的输出轴连接,另一个同步轮与其中一组行走组件的行走脚架连接;所述另一个传动齿轮与另一组行走组件的行走脚架连接。通过上述结构,可以共用一个动力,同时完成两组行走组件的伸缩操作。
16、进一步,同一组行走组件的行走轮和行走脚架均设有两个;
17、所述伸缩传动组件还包括同步轴,该同步轴固定连接在两个行走脚架之间。这样,可以共用一个动力,同时完成同一组的两个行走脚架的伸缩操作。
18、本实用新型与现有技术相比具有以下有益效果:
19、1、本实用新型的供热管网巡检无人机通过后台的工作人员遥控无人机本体在管道的上方飞行,即可透过检测模块远程观察管道的情况,实现飞行巡检,大大降低工人劳动量,还可以提高巡检效率。
20、2、如果有树木等阻挡,飞行检测可能受到阻碍,或者有些检测项目需要贴近管道进行检测,则需要遥控无人机本体降落到管道上;通过行走驱动机构驱动行走轮进行转动,从而可以沿着管道行走,实现行走巡检,功能强大。
技术特征:1.一种供热管网巡检无人机,其特征在于,包括检测模块、无人机本体以及行走机构;
2.根据权利要求1所述的供热管网巡检无人机,其特征在于,所述检测模块包括视觉检测器或红外热成像仪或超声探伤器。
3.根据权利要求1或2所述的供热管网巡检无人机,其特征在于,所述检测模块设置在行走机构的安装盒上。
4.根据权利要求1所述的供热管网巡检无人机,其特征在于,同一组行走组件的行走轮和行走脚架均设有两个;两个行走脚架平行设置。
5.根据权利要求4所述的供热管网巡检无人机,其特征在于,所述行走驱动机构的驱动端与同一组的其中一个行走轮连接。
6.根据权利要求1所述的供热管网巡检无人机,其特征在于,所述行走驱动机构包括行走驱动电机,该行走驱动电机的壳体固定在行走脚架上,该行走驱动电机的输出轴与所述行走轮连接。
7.根据权利要求1所述的供热管网巡检无人机,其特征在于,所述伸缩驱动机构包括伸缩驱动电机和伸缩传动组件;所述伸缩驱动电机设置在安装盒中;所述伸缩传动组件包括两个相互啮合的传动齿轮,其中一个传动齿轮与伸缩驱动电机的输出轴连接,另一个传动齿轮与行走脚架连接。
8.根据权利要求7所述的供热管网巡检无人机,其特征在于,所述伸缩传动组件还包括同步带和两个同步轮,其中一个同步轮与伸缩驱动电机的输出轴连接,另一个同步轮与其中一组行走组件的行走脚架连接;所述另一个传动齿轮与另一组行走组件的行走脚架连接。
9.根据权利要求7所述的供热管网巡检无人机,其特征在于,同一组行走组件的行走轮和行走脚架均设有两个;
技术总结本技术公开一种供热管网巡检无人机,包括检测模块、无人机本体以及行走机构;所述检测模块设置在无人机本体或行走机构上;所述行走机构包括安装盒、行走组件、行走驱动机构以及伸缩驱动机构;所述安装盒固定在无人机本体的底部;所述行走组件设有两组,每组行走组件均包括行走轮和行走脚架,所述行走轮转动连接在行走脚架的一端,所述行走脚架的另一端转动连接在安装盒中;所述行走驱动机构的驱动端与行走轮连接;所述伸缩驱动机构的驱动端与行走脚架连接;所述行走脚架的摆动平面与管道的轴线垂直。该供热管网巡检无人机可以自动对管道进行巡检,大大降低工人劳动量,还可以提高巡检效率。技术研发人员:周法文,熊海燕,郑奕艺,吴庆权,陈元斌,胡锦标受保护的技术使用者:佛山综合能源(公控)有限公司技术研发日:20231114技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/222819.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表