一种垂直起降飞行器及其可倾转旋翼气动控制方法
- 国知局
- 2024-08-01 06:12:25
本发明涉及一种垂直起降飞行器,具体涉及一种垂直起降飞行器及其可倾转旋翼气动控制方法。
背景技术:
1、具有倾转旋翼机构的垂直起降飞行器可以做到在狭小的环境运行的同时具备长途飞行的能力,具有非常光明的应用前景。然而截至今日,可靠的高速飞行垂直起降飞行器的研制仍是一项严峻的挑战;
2、现有的具有倾转旋翼机构的垂直起降飞行器大多采用直驱机构(如电动机)来驱动倾转旋翼机构的转动,这样设计的优势在于原理较为清晰,倾转旋翼机构倾斜角度和角速度控制较为简单;然而旋翼倾转机构本身的复杂度高,可靠性低,在发动机故障或倾转机构驱动故障时,将导致灾难后果;
3、同时,具有倾转旋翼机构的垂直起降飞行器是一个高度复杂的系统,其结构和气动特性在三种飞行模式之间变化显著且相互耦合,动力学模型难以建立,飞行器姿态控制参数难以整定;
4、与本发明最接近的技术方案俄罗斯专利号为ru2700323c2、公开日为2019年3月5日的发明专利公开了《可变旋翼机的构型设计和飞行模式切换的气动控制方法》,该技术的本质是:两对旋翼分别分布在前后两个机翼上,前后一对旋翼短舱的支撑轴通过曲柄连杆机构刚性连接,使前后旋翼可以做到同步倾斜,在垂直起降模式下,通过改变各个旋翼的转速来稳定和控制飞行器,而在切换到巡航飞行模式时,通过增加后旋翼的推力,能够形成一个相对于后翼枢轴的力矩,该力矩通过杆和曲柄传导,使前翼也绕其枢轴倾斜,从而完成飞行模式的切换。而这样设计的飞行器虽然并不需要直驱机构来控制旋翼机构倾转,但是第二个机翼的安装以及两对旋翼的曲柄连杆机构会使其机身结构复杂化且重量增加,同时前翼遮蔽会导致阻力增大,降低飞行器气动性能。
技术实现思路
1、本发明为解决现有倾转旋翼飞行器是通过直驱机构(电动机)控制旋翼倾转机构倾转的角度,由此存在可靠性差、飞行器姿态难以控制、故障率高、故障发生危害程度大的问题,而提供一种垂直起降飞行器及其可倾转旋翼气动控制方法。
2、本发明为解决上述技术问题采取的技术方案是:
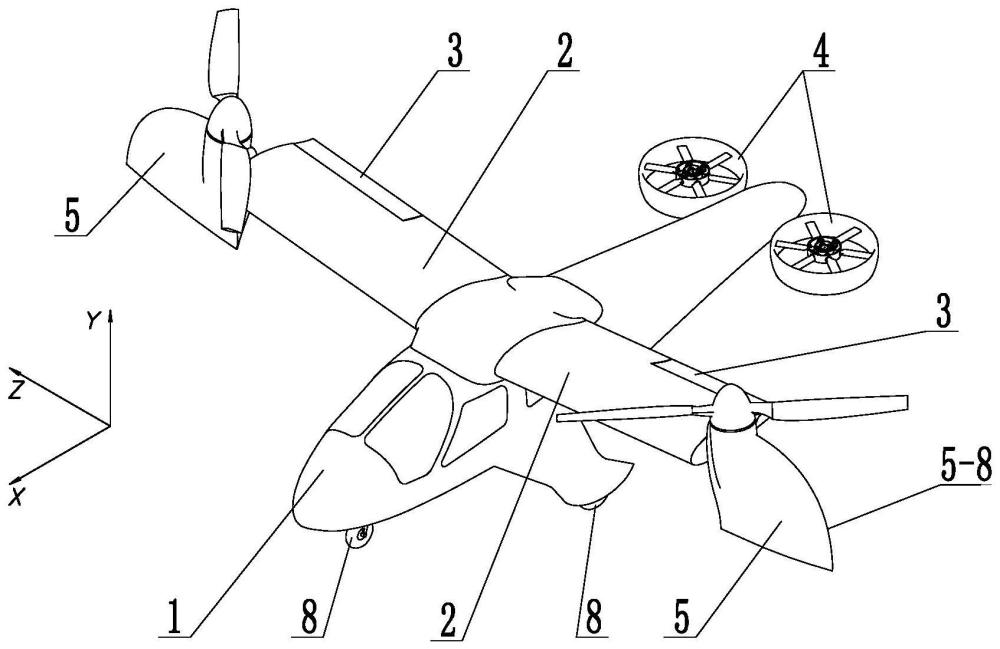
3、一种垂直起降飞行器,其组成包括机身、机翼、副翼、尾翼倾转机构、旋翼倾转机构、尾翼轴、尾翼轴驱动器、起落架、铰链轴、万向节、扇形蜗轮、蜗杆和旋转电机,两个机翼对称设置在机身的两侧,每个机翼上安装一个副翼,起落架设置在机身的底部,两个尾翼倾转机构对称设置在机身尾部的两侧,尾翼倾转机构与尾翼轴固接,尾翼轴设置在机身内部,尾翼轴的输入端与尾翼轴驱动器连接,两个旋翼倾转机构对称设置在两个机翼的外侧,旋翼倾转机构上的短舱框架与铰链轴的一端固接,铰链轴设置在机翼内部,铰链轴的另一端与万向节铰接,万向节与机身内壁固接,扇形蜗轮空套在铰链轴上,扇形蜗轮与机翼内壁固接,蜗杆与扇形蜗轮啮合,蜗杆的两端通过轴承座支撑在旋翼倾转机构的短舱框架上,蜗杆的输入端与旋转电机连接。
4、进一步的,所述旋翼倾转机构包括短舱框架、齿轮变速箱、旋翼发动机、旋翼输出轴、旋翼螺旋桨斜盘、旋翼螺旋桨和斜盘驱动器,齿轮变速箱安装在短舱框架内,齿轮变速箱的输入端与旋翼发动机的输出轴连接,齿轮变速箱的输出端与旋翼输出轴连接,旋翼螺旋桨斜盘通过轴套套接在旋翼输出轴上,旋翼螺旋桨安装在旋翼输出轴末端,旋翼螺旋桨与旋翼螺旋桨斜盘通过被动连杆连接,两个斜盘驱动器对称安装在短舱框架的两侧,斜盘驱动器与旋翼螺旋桨斜盘通过主动连杆连接。
5、进一步的,所述尾翼倾转机构包括环形罩、环形罩框架、尾翼螺旋桨电机、尾翼螺旋桨、尾翼螺旋桨斜盘和尾翼螺旋桨斜盘驱动器,环形罩框架固装在环形罩内,尾翼螺旋桨电机安装在环形罩框架上,尾翼螺旋桨和尾翼螺旋桨斜盘均安装在尾翼螺旋桨电机的输出轴上,尾翼螺旋桨斜盘驱动器安装在环形罩框架上。
6、一种垂直起降飞行器可倾转旋翼气动控制方法,所述方法是通过以下步骤实现的:
7、步骤一、垂直起降模式:飞行前、垂直起飞和着陆时,旋翼输出轴和尾翼螺旋桨电机的输出轴均垂直于飞行器的纵轴x;
8、步骤二、过渡飞行模式:飞行器垂直起飞到达指定高度后,进入过渡飞行模式,通过斜盘驱动器驱动旋翼螺旋桨斜盘调节旋翼螺旋桨的循环螺距,即改变旋翼螺旋桨上的叶片相对于飞行器横轴z的倾斜角,使得旋翼螺旋桨产生相对于旋翼输出轴具有角度的推力,推力相对于铰链轴形成推力臂,推力相对于铰链轴产生力矩,力矩使得旋翼倾转机构随着蜗杆绕扇形涡轮相对于铰链轴转动,在旋翼倾转机构旋转的同时,尾翼倾转机构在尾翼轴驱动器的驱动下绕尾翼轴旋转,在过渡飞行模式下,飞行器的俯仰稳定和控制是通过控制尾翼螺旋桨电机同步改变左右尾翼螺旋桨的转速大小,以及通过尾翼螺旋桨斜盘调整尾翼螺旋桨的集体螺距同步改变左右尾翼螺旋桨产生的轴向推力大小来实现;在过渡飞行模式下,飞行器的滚转控制和航向稳定是通过左右旋翼螺旋桨斜盘调整左右旋翼螺旋桨的集体螺距差动产生的轴向推力实现,当左侧旋翼螺旋桨产生的轴向推力大于右侧旋翼螺旋桨产生的轴向推力时,飞行器会顺时针旋转,当左侧旋翼螺旋桨产生的轴向推力小于右侧旋翼螺旋桨产生的轴向推力时,飞行器会逆时针旋转;
9、步骤三、巡航飞行模式:在过渡飞行模式下,当机翼能提供足够的升力维持飞行器在空中飞行的速度后,飞行器切换为巡航飞行模式,在巡航飞行模式下,旋翼输出轴和尾翼螺旋桨电机的输出轴与纵轴x平行。
10、本发明与现有技术相比具有以下有益效果:
11、1、本发明的垂直起降飞行器与现有飞行器不同之处在于旋翼倾转机构可以相对机翼旋转,由于扇形蜗轮牢牢地固定在机翼上,蜗杆通过轴承座支撑在旋翼倾转机构的短舱框架上,蜗杆上的旋转电机用于控制旋翼倾转机构倾斜角度和角速度,使其可以达到垂直、水平或任何倾斜位置。万向节位于机翼中部,确保了左右两侧的旋翼倾转机构同步倾转。本发明的垂直起降飞行器采用蜗轮蜗杆限制旋翼倾转机构的旋转角速度,从而实现垂直起降模式和巡航飞行模式的平稳切换;相较于传统直驱倾转机构,本发明中的旋翼倾转机构绕铰链轴倾转所需的转矩由旋翼螺旋桨产生的轴向推力提供,而并不需要直驱倾转机构,可以提高飞行器的可靠性,减轻飞行器的重量,并改善飞行器的气动特性。以及提升气动性能;同时,旋翼倾转机构与尾翼倾转机构共同作用,将进一步提高飞行器的飞行速度、续航时间和整体效率。
12、2、本发明的垂直起降飞行器还设计了对称的尾翼倾转机构,两个尾翼倾转机构通过尾翼轴紧密相连,尾翼倾转机构位于机身尾部并垂直于纵轴x,尾翼轴由尾翼轴驱动器驱动旋转。
13、3、本发明的垂直起降飞行器的升力由旋翼倾转机构产生,飞行器的飞行高度与速度通过左右旋翼倾转机构的轴向推力同步变化而改变。为此,需要等量改变左右旋翼螺旋桨斜盘的集体螺距使左右旋翼倾转机构产生相同的轴向推力,并且在垂直起降模式下,通过改变尾翼倾转机构的轴向推力方向与大小来进行飞行器的俯仰运动控制;飞行器的滚转运动控制则是通过差动改变旋翼倾转机构的推力大小来实现的。
14、4、本发明的方法是通过旋翼螺旋桨斜盘调整旋翼螺旋桨的循环螺距和集体螺距的方式来调整旋翼螺旋桨的叶面倾角,在过渡飞行模式下,飞行器上升到给定高度后,旋翼倾转机构上的螺旋桨叶片的循环螺距发生变化,从而使旋翼螺旋桨产生相对于旋翼输出轴具有一定角度的推力,该推力相对于铰链轴形成推力臂,从而产生相对于铰链轴的力矩,并利用蜗轮蜗杆传动控制旋翼倾转机构倾转的角速度。蜗轮蜗杆传动节约了空间,降低了飞行器质量,从而增加飞行时间和速度;蜗轮蜗杆传动相较现有的直驱机构,可靠性更高,因此可以降低驱动机构故障的可能性。
15、5、本发明的方法在水平巡航模式下通过倾斜尾翼倾转机构能够产生额外的推力,这可以增加飞行器的飞行速度、续航时间和效率。飞行器的尾翼倾转机构使其在悬停模式下更易于控制且具有更强的稳定性,提高了飞行器的可靠性和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222909.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。