双磁悬浮电动垂直起落飞行器的制作方法
- 国知局
- 2024-08-01 06:16:27
本发明涉及飞行器领域,具体涉及双磁悬浮电动垂直起落飞行器。
背景技术:
1、电动垂直起降飞行器是一种变革性的新型航空飞行器产品,发展道路虽然才刚刚起步,但是其广阔的市场前景,已经受到了全球投资者的广泛关注,发展前景一片光明。
2、目前,电动垂直起降飞行器行业正处于起步期,但未来市场前景非常可观,根据国际知名的商业咨询公司research and markets的预测:到2025年,evtol市场规模将达到1.62亿美元,到2030年将达到4.11亿美元,预测期间的复合年增长率cagr为20.42%。还有商业咨询公司预测到2040年evtol市场规模为1万亿美元。短期来看,政策驱动及产业链的完善,将释放evtol发展的巨大空间;长期来看,技术成熟、成本下降和应用需求增加将推动电动垂直起降飞行器(evtol)行业的发展。
3、现阶段的电动垂直起落飞行器虽然可实现垂直起落的功能,但存在噪声大、悬停效果不佳的问题。
4、因此,发明双磁悬浮电动垂直起落飞行器很有必要。
技术实现思路
1、为此,本发明提供双磁悬浮电动垂直起落飞行器,以解决现阶段的电动垂直起落飞行器虽然可实现垂直起落的功能,但存在噪声大、悬停效果不佳的问题。
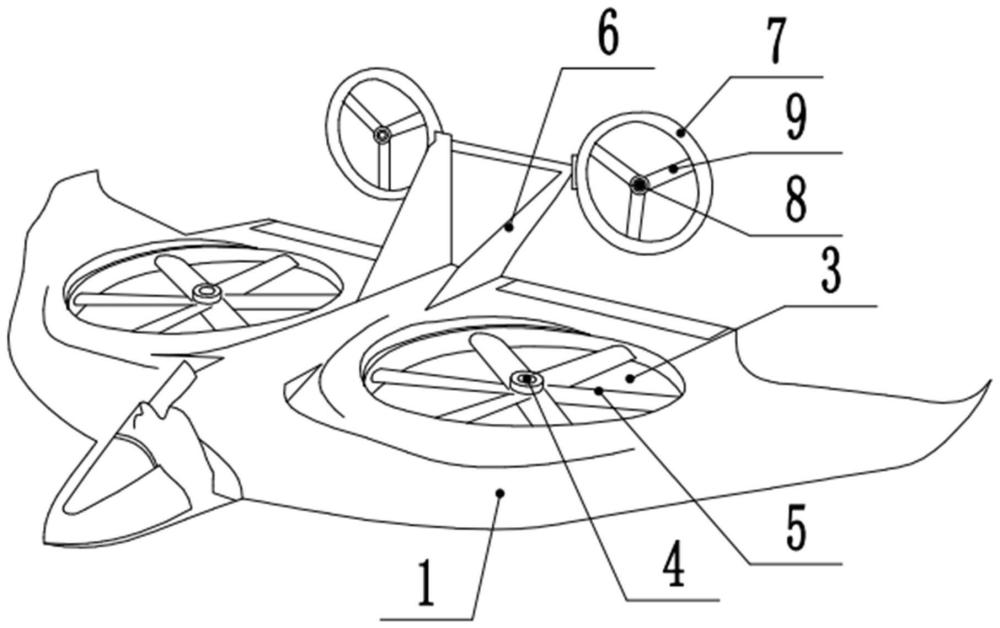
2、为了实现上述目的,本发明提供如下技术方案:双磁悬浮电动垂直起落飞行器,飞行器内置有控制器,还包括低地轨道网联无人机单元、避障单元与混动驱动单元,所述飞行器两个机翼内侧对称开设有安装孔,所述安装孔内通过磁悬浮系统连接有第一气动飞行组件,所述飞行器两个尾翼上活动连接有安装环,所述安装环内通过磁悬浮转子连接有第二气动飞行组件。
3、优选的,所述第一气动飞行组件包括第一微型电机,所述第一微型电机电性连接控制器,所述第一微型电机设置在安装孔中心处,所述第一微型电机输出轴固定有第一桨叶,所述第一桨叶端部与安装孔孔壁磁悬浮转子连接。
4、优选的,所述第二气动飞行组件包括第二微型电机,所述第二微型电机电性连接控制器,所述第二微型电机位于安装环中心处,所述第二微型电机输出轴固定有第二桨叶,所述第二桨叶端部与安装环内壁磁悬浮转子连接。
5、优选的,所述低地轨道网联无人机单元包括:
6、低地轨道卫星,所述低地轨道卫星通过卫星网络与控制器通信连接,用于飞行器定位和导航,且用于将飞行器宽带互联网地球全覆盖,速率1gbit/s、延迟时间小于10ms。
7、优选的,所述混动驱动单元包括:
8、微型柴油机,所述微型柴油机内置在飞行器内;
9、微型发电机,所述微型发电机内置在飞行器内,所述微型柴油机用于驱动微型发电机发电;
10、充电控制器,所述充电控制器内置在飞行器内,所述充电控制器电性连接微型发电机;
11、聚合物电池,所述聚合物电池内置在飞行器内,所述聚合物电池电性连接充电控制器;
12、逆变器,所述逆变器内置在飞行器内,所述逆变器电性连接聚合物电池,所述逆变器与控制器电性连接。
13、优选的,所述避障单元包括:
14、红外传感器,所述红外传感器均匀分布在飞行器上,所述红外传感器电性连接控制器;
15、超声波传感器,所述超声波传感器均匀分布在飞行器上,所述超声波传感器电性连接控制器;
16、激光传感器,所述激光传感器均匀分布在飞行器上,所述激光传感器电性连接控制器;
17、双目视觉避障模块,所述双目视觉避障模块均匀分布在飞行器上,所述双目视觉避障模块电性连接控制器。
18、本发明的有益效果是:
19、1.采用双旋翼结构,并利用双磁悬浮结构系统代替传统的滚子轴承,实现转轴的无接触支撑,具有摩擦阻力小、不受转速限制、工作温度范围宽、使用寿命长,以及降低了飞行器定常噪声等优点;
20、2.应用磁悬浮技术,大大提高了悬停效率,在相同能耗的前提下能够搭载更多载荷;
21、3.活动零部件少,结构简单实用,气动效率高,提高了安全可靠性;
22、4.采用油电混合动力系统,两种动力装置组装可降低能耗、减少噪声和排放、增大航时和航程;
23、5.采用低地轨道网联无人机技术,实现宽带互联网地球全覆盖;
24、6.采用智能壁障技术,自主飞行感知障碍物,自主绕开和规划路径阶段。
技术特征:1.双磁悬浮电动垂直起落飞行器,飞行器(1)内置有控制器(2),其特征在于:所述飞行器(1)两个机翼内侧对称开设有安装孔(3),所述安装孔(3)内通过磁悬浮系统连接有第一气动飞行组件,所述飞行器(1)两个尾翼(6)上活动连接有安装环(7),所述安装环(7)内通过磁悬浮连接有第二气动飞行组件;
2.根据权利要求1所述的双磁悬浮电动垂直起落飞行器,其特征在于:所述第二气动飞行组件包括第二微型电机(8),所述第二微型电机(8)电性连接控制器(2),所述第二微型电机(8)位于安装环(7)中心处,所述第二微型电机(8)输出轴固定有第二桨叶(9),所述第二桨叶(9)端部与安装环(7)内壁磁悬浮转子连接。
3.根据权利要求1所述的双磁悬浮电动垂直起落飞行器,其特征在于:所述飞行器(1)还包括低地轨道网联无人机单元,所述低地轨道网联无人机单元包括:
4.根据权利要求1所述的双磁悬浮电动垂直起落飞行器,其特征在于:所述飞行器(1)还包括混动驱动单元,所述混动驱动单元包括:
5.根据权利要求1所述的双磁悬浮电动垂直起落飞行器,其特征在于:所述飞行器(1)还包括避障单元,所述避障单元包括:
技术总结本发明涉及飞行器领域,具体涉及双磁悬浮电动垂直起落飞行器,飞行器内置有控制器,还包括低地轨道网联无人机单元、避障单元与混动驱动单元,所述飞行器两个机翼内侧对称开设有安装孔,所述安装孔内通过磁悬浮系统连接有第一气动飞行组件,所述飞行器两个尾翼上活动连接有安装环,所述安装环内通过磁悬浮系统连接有第二气动飞行组件,本发明的有益效果是:采用双旋翼结构,并利用双磁悬浮结构系统代替传统电动机转子轴的滚子轴承支撑结构,实现转轴的无接触支撑,具有摩擦阻力小、不受转速限制、工作温度范围宽、使用寿命长,以及降低了飞行器定常噪声等优点。技术研发人员:符长青,张月义,张伟,符晓勤,凌琪,张翰博受保护的技术使用者:稞米科技(深圳)有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/223074.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种气囊飞行器的制作方法
下一篇
返回列表