一种载荷照料装置
- 国知局
- 2024-08-01 06:16:35
本发明涉及空间站,具体涉及一种载荷照料装置。
背景技术:
1、随着空间站的建成以及后续设施的不断完善,大量科学实验即将在空间实验室滚动开展,这其中包括但不限于科学实验载荷上行、转运、在轨操作、实验开展任务,这些均需由航天员亲历亲为,航天员现在或将要面临的是任务重、要求高、强度大、时间紧等问题。
2、航天员在轨工作种类繁多,既要面对难度高、操作性强的科学实验还要完成各科学实验柜公共支持设施的在轨维护、升级,以及消耗品补给等任务。基于这种背景下机器人的推广应用无疑是必然且必要的。在简单且重复的操作上,相比于对航天员的培养和时间、资源的投入,机器人的替代是更有优势且更效率的,航天员应该集中精力在难度更高、步骤复杂,协同操作性更强的作业任务上,把空间实验平台的日常维护分摊给照料机器人。所以研制能够照料科学实验平台以及日常维护的载荷照料装置迫在眉睫。
3、在现有科研运用机器人的场景中普遍存有针对性比较强、通用性比较低的特点,主要以工业机器人以及特种机器人为主。工业机器人的代表是在轨中小型机械臂,可以协同辅助航天员开展实验,没有自主管理能力也没有移动能力,仅依靠程序来进行机械且重复的操作,局限性强。特种机器人则千差万别,尤其是结构,几乎是一个场景一种设计如月球车等。
技术实现思路
1、本发明为了解决上述技术问题的一种或几种,提供了一种载荷照料装置。
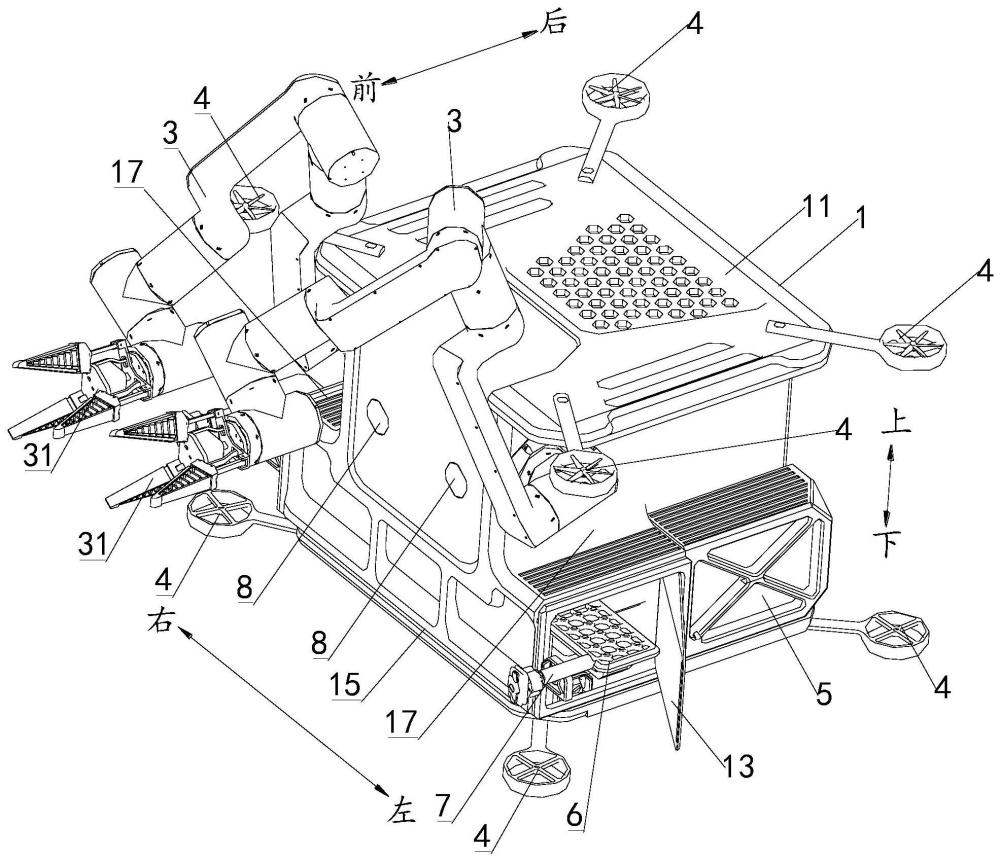
2、本发明解决上述技术问题的技术方案如下:一种载荷照料装置,包括结构壳体、机械臂、旋翼组件、电源系统、锁紧驱动机构和控制系统,所述结构壳体前端的左侧壁和右侧壁上分别安装有机械臂,所述结构壳体的顶壁和/或底壁分别安装有旋翼组件,所述电源系统、控制系统以及锁紧驱动机构分别安装在所述结构壳体内,所述电源系统分别与机械臂、锁紧驱动机构以及旋翼组件电连接,所述控制系统分别与电源系统、机械臂、锁紧驱动机构和旋翼组件电连接;
3、所述锁紧驱动机构的驱动端连接并驱动锁紧杆从结构壳体内伸出或收回,所述锁紧杆位于所述结构壳体的左侧或/和右侧,所述锁紧杆沿前后方向延伸布置。
4、本发明的有益效果是:本发明的载荷照料装置,通过将机械臂、旋翼组件、锁紧驱动机构集成在方形的结构壳体内,通用性强,可以实现对舱内货包、组件、工具等的搬运服务,对舱内基础设施进行维护、对消耗品进行自主更换,对设备状态实时更新等;还可以充当移动工具箱,将比较小型的工具存放在结构壳体内,在需要的时候可以供航天员使用;还可以辅助航天员进行复杂科学实验或独立完成简单操作,节约时间以及人力成本。本发明的载荷照料装置还能通过锁紧杆与实验柜柜口轨道进行锁紧配合,可以配合机械臂实现对实验柜内载荷的维修、维护及操作,如工具、辅料等小零件的临时传递与收纳等。
5、在上述技术方案的基础上,本发明还可以做如下改进。
6、进一步,所述锁紧驱动机构包括x向驱动部和y向驱动部,所述x向驱动部的第一主体结构安装在所述结构壳体内,所述x向驱动部的驱动端与所述y向驱动部的第二主体结构固定连接并驱动y向驱动部沿左右方向运动,所述y向驱动部的驱动端连接有锁紧杆并驱动锁紧杆沿前后方向运动。
7、采用上述进一步方案的有益效果是:通过设置x向驱动部和y向驱动部,可以实现锁紧杆在x向和y向位置的调整,便于适配实验柜上的轨道。
8、进一步,所述x向驱动部采用第一丝杠螺母驱动机构,第一丝杠螺母驱动机构的第一主体结构安装在所述结构壳体内,所述y向驱动部采用第二丝5杠螺母驱动机构,所述第二丝杠螺母驱动机构的第二主体结构固定在所述第一丝杠螺母驱动机构的第一滑块上,所述锁紧杆固定在第二丝杠螺母驱动机构的第二滑块上。
9、采用上述进一步方案的有益效果是:采用丝杠螺母驱动机构进行x向或y向位置调整,调整精度更高。
10、0进一步,所述结构壳体左右两侧壁的上部分别设有安装槽,所述机械臂的一端安装在所述安装槽内且能够整体折叠后隐藏在所述安装槽内。
11、采用上述进一步方案的有益效果是:通过设置安装槽,可以将机械臂隐藏在安装槽内,方便收纳上行。
12、进一步,所述机械臂为六轴机械臂,所述机械臂的末端设有末端执行器;5所述旋翼组件通过折叠杆连接在所述结构壳体上。
13、采用上述进一步方案的有益效果是:可以将旋翼组件也折叠后收纳在结构壳体表面,方便收纳上行。
14、进一步,还包括分别与控制系统电连接的视觉模块、激光传感器、声觉模块、显示屏和压力传感器;
15、0所述视觉模块和显示屏均安装在所述结构壳体的前侧壁上;所述激光传感器安装在结构壳体的外侧壁上;所述声觉模块安装在结构壳体内;所述压力传感器安装在所述机械臂的关节处并用于检测机械臂关节处的压力。
16、进一步,还包括与控制系统电连接的交互系统,所述交互系统用于获取语音或图形手势交互信号,并发送至控制系统;
17、5所述控制系统用于根据所述语音或图形手势交互信号控制所述旋翼组件按照设定轨迹运行,或/和,所述控制系统用于根据所述语音或图形手势交互信号控制机械臂进行动作。
18、采用上述进一步方案的有益效果是:通过设置交互系统,可以通过语音识别或图形手势识别航天员指令,并控制旋翼组件或机械臂进行相应动作。
19、进一步,所述电源系统包括电池组件、配电单元和无线传能接收器,所述配电单元所述电池组件连接并用于实现自身主备电切换、加断电控制及状态遥测,所述无线传能接收器与所述电池组件电连接并通过无线传能技术对电池组件进行充电。
20、采用上述进一步方案的有益效果是:可以通过无线传能技术实现电池组件的充电。
21、进一步,所述无线传能接收器设置在所述结构壳体的底部,所述结构壳体左右两侧壁的下部后侧设置所述电池组件,所述结构壳体的后侧壁上设置所述配电单元。
22、采用上述进一步方案的有益效果是:使结构设置更合理。
23、进一步,所述结构壳体左右两侧壁的下部分前侧设有开关门,所述结构壳体的顶壁为平面结构。
24、采用上述进一步方案的有益效果是:结构壳体的顶壁设置为平面结构,可以扩展为移动维修平台。
技术特征:1.一种载荷照料装置,其特征在于,包括结构壳体、机械臂、旋翼组件、电源系统、锁紧驱动机构和控制系统,所述结构壳体前端的左侧壁和右侧壁上分别安装有机械臂,所述结构壳体的顶壁和/或底壁分别安装有旋翼组件,所述电源系统、控制系统以及锁紧驱动机构分别安装在所述结构壳体内,所述电源系统分别与机械臂、锁紧驱动机构以及旋翼组件电连接,所述控制系统分别与电源系统、机械臂、锁紧驱动机构和旋翼组件电连接;
2.根据权利要求1所述一种载荷照料装置,其特征在于,所述锁紧驱动机构包括x向驱动部和y向驱动部,所述x向驱动部的第一主体结构安装在所述结构壳体内,所述x向驱动部的驱动端与所述y向驱动部的第二主体结构固定连接并驱动y向驱动部沿左右方向运动,所述y向驱动部的驱动端连接有锁紧杆并驱动锁紧杆沿前后方向运动。
3.根据权利要求2所述一种载荷照料装置,其特征在于,所述x向驱动部采用第一丝杠螺母驱动机构,第一丝杠螺母驱动机构的第一主体结构安装在所述结构壳体内,所述y向驱动部采用第二丝杠螺母驱动机构,所述第二丝杠螺母驱动机构的第二主体结构固定在所述第一丝杠螺母驱动机构的第一滑块上,所述锁紧杆固定在第二丝杠螺母驱动机构的第二滑块上。
4.根据权利要求1所述一种载荷照料装置,其特征在于,所述结构壳体左右两侧壁的上部分别设有安装槽,所述机械臂的一端安装在所述安装槽内且能够整体折叠后隐藏在所述安装槽内。
5.根据权利要求1所述一种载荷照料装置,其特征在于,所述机械臂为六轴机械臂,所述机械臂的末端设有末端执行器;所述旋翼组件通过折叠杆连接在所述结构壳体上。
6.根据权利要求1所述一种载荷照料装置,其特征在于,还包括分别与控制系统电连接的视觉模块、激光传感器、声觉模块、显示屏和压力传感器;
7.根据权利要求1所述一种载荷照料装置,其特征在于,还包括与控制系统电连接的交互系统,所述交互系统用于获取语音或图形手势交互信号,并发送至控制系统;
8.根据权利要求1所述一种载荷照料装置,其特征在于,所述电源系统包括电池组件、配电单元和无线传能接收器,所述配电单元所述电池组件连接并用于实现自身主备电切换、加断电控制及状态遥测,所述无线传能接收器与所述电池组件电连接并通过无线传能技术对电池组件进行充电。
9.根据权利要求8所述一种载荷照料装置,其特征在于,所述无线传能接收器设置在所述结构壳体的底部,所述结构壳体左右两侧壁的下部后侧设置所述电池组件,所述结构壳体的后侧壁上设置所述配电单元。
10.根据权利要求1所述一种载荷照料装置,其特征在于,所述结构壳体左右两侧壁的下部分前侧设有开关门,所述结构壳体的顶壁为平面结构。
技术总结本发明涉及一种载荷照料装置,包括结构壳体、机械臂、旋翼组件、电源系统、锁紧驱动机构和控制系统,结构壳体前端的左侧壁和右侧壁上分别安装有机械臂,结构壳体的顶壁和/或底壁分别安装有旋翼组件,所述电源系统、控制系统以及锁紧驱动机构分别安装在结构壳体内,电源系统分别与机械臂、锁紧驱动机构以及旋翼组件电连接,控制系统分别与电源系统、机械臂、锁紧驱动机构和旋翼组件电连接;所述锁紧驱动机构的驱动端连接并驱动锁紧杆从结构壳体内伸出或收回,所述锁紧杆位于所述结构壳体的左侧或/和右侧,所述锁紧杆沿前后方向延伸布置。本发明的载荷照料装置,通过将机械臂、旋翼组件、锁紧驱动机构集成在方形的结构壳体内,通用性强。技术研发人员:李泽韬,王珂,张聚乐,吕宏宇,全源受保护的技术使用者:中国科学院空间应用工程与技术中心技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/223092.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表