一种面向舰船实海航行的性能评估及辅助决策系统及方法
- 国知局
- 2024-08-01 06:23:41
本发明属于海洋环境预测技术及船舶运动响应计算领域,尤其涉及一种面向舰船实海航行的性能评估及辅助决策系统及方法。
背景技术:
1、舰船在海上执勤时,尽管有天气预报数值产品提供风场、波浪等水文气象预报数值产品,可为舰船操船人员提供航线附近海域的水文气象信息,但无法得到舰船在风浪环境中的摇荡的具体评估结果,所以舰船的航行依靠船长等的判断。但遭遇恶劣海况及能见度较低的海洋环境时,依靠经验评估海洋环境可能会导致舰船航行决策出现失误,威胁舰船航行的安全性和产生不必要的能耗。因此,通过对实海域海洋环境进行快速预报并结合船舶运动响应,对实海域航行船舶进行适航性能评估具有重要意义。
2、基于舰船海上航行作业的背景与舰船安全航行的实际需求,本发明提出一种面向舰船实海航行的性能评估及辅助决策系统。首先基于机器学习实现海洋环境的快速预报,然后基于实海域风浪环境预报数据开发舰船摇荡性能评估模型,为舰船海上航行规划提供直接的精确的辅助判断信息,为保障船舶在实海域中安全航行和海上执行任务提供技术手段。
3、当前,已有通过岸基获取实时气象数据或水文气象预报数据,并进一步通过船舶性能参数或船舶运动响应库对航线上各个海区的风险等级进行评价的研究。
4、通过上述分析,现有技术存在的问题及缺陷为:在当前的船舶适航性能评估研究中,已经有通过岸基或气象台获取实海域环境数据并对船舶的摇荡进行评估的相关研究,但多数在预报中使用的环境数据为开源数据,信息存在一定滞后性,船舶在航行过程中,不能及时、准确的获取海洋环境数据,从而导致摇荡评估不及时、不准确等问题。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种面向舰船实海航行的性能评估及辅助决策系统及方法。具体涉及一种通过预报的海洋环境数据评估船舶运动的方法。
2、所述技术方案如下:面向舰船实海航行的性能评估及辅助决策方法,包括:
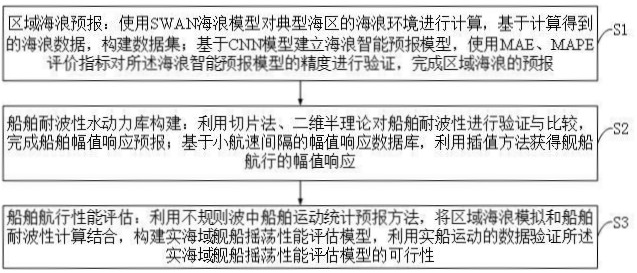
3、s1,区域海浪预报:使用swan海浪模型对典型海区的海浪环境进行计算,基于计算得到的海浪数据,构建数据集;基于cnn模型建立海浪智能预报模型,使用mae、mape评价指标对所述海浪智能预报模型的精度进行验证,完成区域海浪的预报;
4、s2,船舶耐波性水动力库构建:利用切片法、二维半理论对船舶耐波性进行验证与比较,完成船舶幅值响应预报;基于小航速间隔的幅值响应数据库,利用插值方法获得舰船航行的幅值响应;
5、s3,船舶航行性能评估:利用不规则波中船舶运动统计预报方法,将区域海浪模拟和船舶耐波性计算结合,构建实海域舰船摇荡性能评估模型,利用实船运动的数据验证所述实海域舰船摇荡性能评估模型的可行性。
6、在步骤s1中,所述使用swan海浪模型对典型海区的海浪环境进行计算包括:通过公开的环境数据集获得目标海域风场信息和地形信息,设置swan模式运行的配置参数运行swan模式,所述配置参数包括模拟时间、模拟范围、模拟分辨率信息。
7、在步骤s1中,所述海浪智能预报模型输入为计算域风场数据及过去的波浪数据,输出为计算域当前的波浪数据;cnn利用卷积核对输入矩阵进行滤波操作,所述滤波操作为卷积核与输入数据相乘再相加,表达式为:
8、;
9、式中,为当前层的特征映射,为激活函数,为特征映射的集合,为上一层的特征映射,为第层位置的卷积滤波器所对应的权重,为偏置;
10、所述输入数据为;
11、cnn利用池化核对输入矩阵进行下采样,将输入矩阵各处的显著特征信息筛选出来;池化有最大值池化和平均值池化,最大值池化为提取池化核对应位置矩阵的最大值,平均值池化则为提取平均值,表达式分别为:
12、;
13、;
14、式中,为平均值池化后的数,为最大值池化后的数,为池化核作用的局部矩阵,为作用的局部矩阵的数字个数,所述数字个数为局部矩阵中的元素数目。
15、在步骤s1中,mae、mape评价指标的计算公式如下:
16、;
17、;
18、式中,为样本个数,为真实值,为预测值,为平均绝对误差,为平均相对误差。
19、在步骤s2中,所述船舶耐波性水动力库构建包括:基于catia建模软件,通过已知的型值、型线数据对船体进行建模,并根据船体横剖线图、纵剖线图对船体曲面进行光顺;
20、基于ug软件对船体曲面进行切片划分,通过截出切片处的船体轮廓线进行均匀布点,得到各切片点的半宽和吃水值;
21、基于构造得到的船型数据文件及用户配置的工况,根据弗汝德数对航速进行划分,船舶低速航行时采用切片法、高速航行时采用二维半方法计算得到船舶运动响应,形成不同航向、航速下的船舶水动力运动响应数据库。
22、在步骤s2中,所述插值方法包括:由已知的航线上船舶的航速搜索数据库中相近的航速的幅值响应,利用插值公式计算出航线上船舶航速下的幅值响应,表达式为:
23、;
24、式中,为航线上的船舶航速,单位是m/s;为数据库中临近的较低的航速,单位是m/s;为数据库中临近的较高的航速,单位是m/s;为航线上的船舶幅值响应,为数据库中航速下的幅值响应,为数据库中航速下的幅值响应。
25、在步骤s3中,所述构建实海域舰船摇荡性能评估模型包括:基于深度学习模型得到的区域风浪数据,进行ittc双参数谱计算,拟合海浪谱,表达式为:
26、;
27、;
28、;
29、式中,为波浪的特征周期,,如果缺乏波浪特征周期资料,取平均周期,即,为有义波高,为谱密度函数,为由有义波高和波周期决定的参数,为波浪频率,为由波周期决定的参数。
30、进一步,所述进行ittc双参数谱计算,公式为:
31、;
32、式中,为海浪谱对原点的一阶矩,为频率的微分,得到:
33、;
34、;
35、;
36、;
37、;
38、代入后得到双参数海浪谱:
39、;
40、式中,为有义波高,单位为m;为波浪的特征周期,单位为s;为海浪谱对原点的0阶矩,为波能谱密度函数,单位是;
41、当缺乏海浪资料时,取为平均观测周期,当时,达到最大值,最大值为;
42、得到海浪谱后,结合切片法及二维半法得到的船舶幅频响应函数,利用谱分析理论,根据波能谱和船舶摇荡能谱的关系,得到船舶摇荡能谱;基于船舶摇荡能谱,通过积分计算进而得到船舶运动的有义值。
43、在步骤s3中,所述不规则波中船舶运动统计预报方法包括:无航速条件下,令波能谱密度函数为,船舶摇荡能谱密度函数为,表达式为:
44、;
45、式中,为波能谱密度函数,单位是,为船舶摇荡谱密度函数,为频率响应函数;
46、船舶航行时,遭遇频率的表达式为:
47、;
48、式中,为遭遇频率,单位是rad/s;为波浪真实频率,单位是rad/s;为船舶航速,单位是m/s;为重力加速度,单位是;为浪向角,单位是°;
49、根据雅可比转换得:
50、;
51、在波浪能谱的转换只是由航速引起作用于船上的扰动力频率发生变化,而对应波浪没有发生变化,因此波浪总能量前后不变,即:
52、;
53、将根据雅可比转换得到的公式代入上式中,得:
54、;
55、计算出遭遇频率的波能谱,计算出船舶在有航速情况下运动谱,即:
56、;
57、由此对船舶运动谱积分获得船舶运动的有义值。
58、本发明的另一目的在于提供一种面向舰船实海航行的性能评估及辅助决策系统,该系统实施所述面向舰船实海航行的性能评估及辅助决策方法,该系统包括:
59、区域海浪预报模块,用于使用swan海浪模型对典型海区的海浪环境进行计算,基于计算得到的海浪数据,构建数据集;基于cnn模型建立海浪智能预报模型,使用mae、mape评价指标对所述海浪智能预报模型的精度进行验证,完成区域海浪的预报;
60、船舶耐波性水动力库构建模块,用于利用切片法、二维半理论对船舶耐波性进行验证与比较,完成船舶幅值响应预报;基于小航速间隔的幅值响应数据库,利用插值方法获得舰船航行的幅值响应;
61、船舶航行性能评估模块,用于利用不规则波中船舶运动统计预报方法,将区域海浪模拟和船舶耐波性计算结合,构建实海域舰船摇荡性能评估模型,利用实船运动的数据验证所述实海域舰船摇荡性能评估模型的可行性。
62、结合上述的所有技术方案,本发明所具备的有益效果为:本发明提出了一种面向舰船实海航行的性能评估及辅助决策系统,该系统通过将深度学习与船舶航行性能结合,构建船舶实海域摇摆运动计算方法,通过本系统可以实现实海域环境预报及船舶适航性评估,为舰船海上航行规划提供直接的精确的辅助判断信息,为保障船舶在实海域中安全航行和海上执行任务提供技术手段。
63、本发明通过数值模式计算的海浪数据,利用深度学习模型对区域海浪的统计值、波浪谱等信息等进行预报,结合船舶航行性能,构建船舶实海域摇摆运动计算方法,实现实海域环境预报及船舶适航性评估。相比传统方法,该方法使用机器学习模型对航线上的海洋环境进行预报,能够快速、准确预测不同提前时间、不同位置处的有义波高、波周期等海浪要素,从而与船舶运动响应相结合,更好的实现船舶摇荡性能的评估。本发明可以为舰船的航行提供更准确、及时的海洋环境数据和船舶摇荡性能评估数据,为船舶的航行提供更适用的决策信息,保障舰船在实海域中航行的安全。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223643.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表