一种带有感知功能的水下仿生柔性驱动装置及制备方法
- 国知局
- 2024-08-01 06:23:37
本发明涉及水下航行器的,具体而言,涉及一种带有感知功能的水下仿生柔性驱动装置及制备方法。
背景技术:
1、随着全球范围内对海洋的开发和利用,水下航行器的设计与研制已成为了各国的重要科研课题,在学科交叉融合的大环境下,将水下航行器同水下生物的运动方式及机械动力学相结合,研制仿生水下航行器,通过研究千百年进化而造就的水下生物的航行机制,应用到水下航行器的研制中来,可以极大的提高航行器的能源利用效率,减小噪声,在军事用途以及商业用途中有很好的前景。
2、柔性驱动装置是一种基于柔性材料和机械结构设计的驱动系统,具有高度灵活性和可变形性,与传统的刚性驱动装置相比,柔性驱动装置具有以下优势:高度可变形性及顺应性:柔性驱动装置采用柔性材料和机械结构设计,具有高度可变形性和灵活性,它可以适应不同形状和曲面,实现复杂的运动和形变,能够在狭小或复杂的环境中进行操作,同时,柔性驱动装置由于可以灵活变形,能够减少能量损耗和摩擦,从而实现节能效果;安全性:由于柔性驱动装置采用柔性材料,因此在与人体或其他物体接触时更为安全,它可以减少因碰撞或接触而引起的伤害,适用于与人类进行密切合作的应用场景,如医疗、康复和人机交互等。
3、多自由度和精确控制尽管柔性驱动装置具有许多优势,但也存在一些缺点,例如精确控制困难,由于柔性驱动装置的可变形性和柔性性质,其精确控制相对困难,如果得不到精确的反馈,柔性驱动装置的柔性材料和结构容易受到磨损、疲劳和老化等因素的影响,导致可靠性和耐久性有限,长时间使用或受到高负载和频繁变形的情况下,柔性驱动装置可能会出现失效或损坏,与刚性驱动装置相比,柔性驱动装置需要更精确的传感器反馈,以实现精确的位置和力控制,为后续仿生水下航行器基于环境的自适应控制打下基础。
4、但是目前所使用到的水下柔性驱动装置由于缺乏准确的分析检测手段,导致传感器的设置位置不准确,进而使得获取信息的准确性较低,并且,目前所使用到的水下柔性驱动装置在运行时的稳定性较差,容易受到外界影响。
技术实现思路
1、本发明要解决的问题是:提供一种带有感知功能的水下仿生柔性驱动装置,能够提高获取信息的准确性、提升运行时的稳定性并减少外界影响。
2、为解决上述问题,本发明提供一种带有感知功能的水下仿生柔性驱动装置,包括:
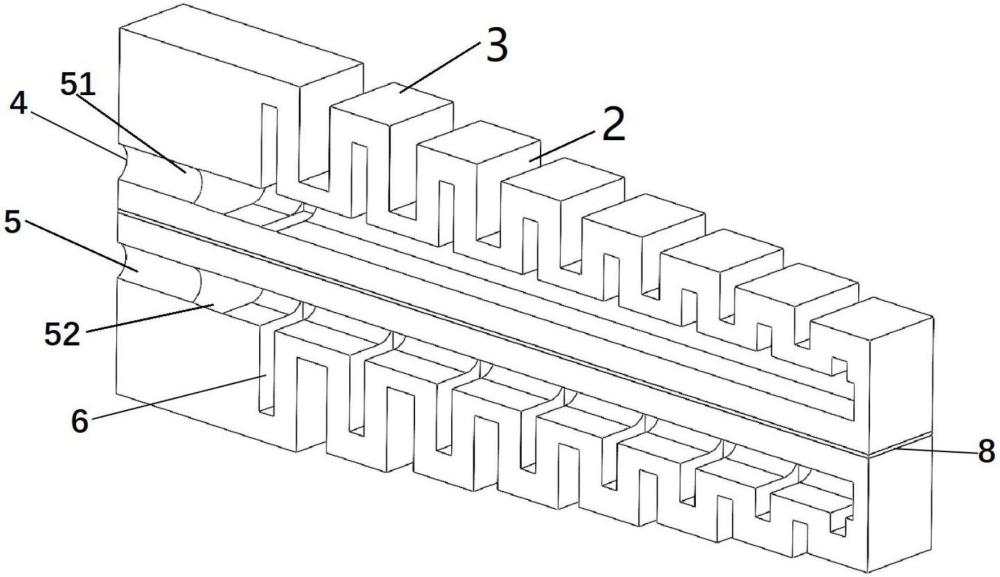
3、两个流体驱动单元,两个所述流体驱动单元沿自身高度方向的一侧与形变限制层一体化浇筑成型,两个所述流体驱动单元沿自身高度方向的另一侧开设有多个槽口且各所述槽口沿所处的所述流体驱动单元的长度方向依次间隔排布,以划分得到间隔排布的多个驱动块,两个所述流体驱动单元沿自身长度方向的一侧分别开设有一输入孔且两个所述输入孔位于同一侧,两个所述输入孔沿所述流体驱动单元的长度方向分别于所处的所述流体驱动单元的内部延伸出一流体通道,各所述驱动块的内部分别开设有一腔体,且处于同一所述流体驱动单元上的所述流体通道和各所述腔体相连通
4、刚性中间板,设于两个所述流体驱动单元之间并一体化浇筑成型;
5、多个传感器,与所述刚性中间板一体化浇筑成型为形变限制层进行信息感知。
6、本发明还提供一种带有感知功能的水下仿生柔性驱动装置的制备方法,应用于上述的水下仿生柔性驱动装置,包括以下步骤:
7、步骤s1,获取预先制备的模具且所述模具与所述流体驱动单元的结构相适配;
8、步骤s2,将混合均匀的硅胶放入负压压力罐内静置进行排泡;
9、步骤s3,将排泡后的所述硅胶缓慢均匀倒入至所述模具内至所述硅胶充满所述模具,并将所述刚性中间板加入至所述模具内进行一体化浇筑;
10、步骤s4,将浇筑完成的所述模具放置成型得到所述流体驱动单元的各个组成部分,并取出各所述组成部分利用硅胶粘合剂进行集成装配并进行一体化浇筑得到所述流体驱动单元;
11、步骤s5,于所述流体驱动单元上安装主体骨架并集成外置管路;
12、步骤s6,对所述流体驱动单元进行变形曲线拟合测试,并根据得到的拟合曲线得到各所述传感器的布局设计;
13、步骤s7,基于所述布局设计,将各所述传感器与一对所述流体驱动单元的所述刚性中间板一体化浇筑制备形成水下仿生柔性驱动装置,随后对所述水下仿生柔性驱动装置进行一体化浇筑固定。
14、优选的,所述步骤s2中,将所述硅胶放入所述负压压力罐内,并在-0.08mpa~-0.05mpa环境下静置排泡5~10min。
15、优选的,所述步骤s6包括:
16、步骤s61,对所述流体驱动单元的侧面标记marker;
17、步骤s62,于所述输入孔对所述流体驱动单元的所述流体通道输入0.01mpa~0.8mpa的压力,使所述流体驱动单元产生0-70°的弯曲变形;
18、步骤s63,对应每10°的弯曲变形,用高清相机进行帧图拍摄,记录对应的弯曲角度及输入压力;
19、步骤s64,对各所述弯曲曲度和各所述输入压力进行变形曲线拟合得到拟合曲线;
20、步骤s65,基于所述拟合曲线,对各所述传感器进行轴向布局得到所述布局设计。
21、优选的,所述步骤s7中,选用0.3mm~0.5mmpet薄板或纤维织物薄板或0.1mm~0.3mm碳纤维板作为所述刚性中间板。
22、本发明具有以下有益效果:本发明的制备过程中将传感器与流体驱动单元一体化浇筑制备,相较于传统的表面贴附型传感器,一体化浇筑制备能够提高传感器运作的稳定性,不会发生驱动过程中传感器的剥离、脱离影响传感器测量结果,提高获取信息的准确性,且将传感器与一对流体驱动单元的刚性中间板一体化浇筑成型为形变限制层,能更准确测量柔性驱动装置的形变测量参数,且有效减少外界影响。
技术特征:1.一种带有感知功能的水下仿生柔性驱动装置,其特征在于,包括:
2.一种带有感知功能的水下仿生柔性驱动装置的制备方法,其特征在于,应用于如权利要求1中所述的水下仿生柔性驱动装置,包括以下步骤:
3.根据权利要求2所述的制备方法,其特征在于,所述步骤s2中,将所述硅胶放入所述负压压力罐内,并在-0.08mpa~-0.05mpa环境下静置排泡5~10min。
4.根据权利要求2所述的制备方法,其特征在于,所述步骤s6包括:
5.根据权利要求3所述的制备方法,其特征在于,所述步骤s7中,选用0.3mm~0.5mmpet薄板或纤维织物薄板或0.1mm~0.3mm碳纤维板作为所述刚性中间板(7)。
技术总结本发明提供了一种带有感知功能的水下仿生柔性驱动装置及制备方法,包括:一体化浇筑成型的双侧流体驱动单元,流体驱动单元沿自身高度方向的另一侧开设有槽口,流体驱动单元沿自身长度方向的一侧开设有输入孔,输入孔于所处的流体驱动单元的内部延伸出流体通道,各驱动块的内部开设有腔体,且流体通道和各腔体相连通;柔性传感器与刚性中间板一体化浇筑成型为形变限制层,并与双侧流体驱动单元一体化制备为带有感知功能的水下仿生柔性驱动装置。有益效果是本发明通过引入感知‑驱动功能一体化成型制备方法,相比于外置粘贴式传统传感器布局方法,能够有效排除外界因素对传感器传感信号的影响,且能够提升仿生水下航行器的适航性和安全性。技术研发人员:宫蕾,侯佳润,曹勇,曹永辉,潘光,宋保维,郝艺伟,刘博俊受保护的技术使用者:西北工业大学宁波研究院技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223635.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表