浮体清洁机器人的制作方法
- 国知局
- 2024-08-01 06:23:36
本发明涉及海上光伏电站结构安全和清洁,具体涉及一种浮体清洁机器人。
背景技术:
1、海上漂浮式光伏电站建设完成后,浮体结构表面在一定时间后会被多种类型的海生物附着。其中一些海生物会腐蚀浮体结构,其影响长期积累下来会极大影响海上漂浮式光伏电站的结构稳定性与安全性。因此需要定期对结构表面附着的海生物进行清理。
2、与船舶不同,漂浮式光伏电站无法运输到船坞内进行维护,只能采用现场维护的方式,而相关技术中用于浮体结构表面清洁维护的方式主要有两种,一种是由至少一名潜水员使用手持设备进行附着物清理,但这种方式成本及危险性高;另一种则是采用清洁机器人自动清理,但相关技术中的清洁机器人十分笨重,在漂浮式光伏电站的浮体的外表面不全为水平面的情况下,清洁机器人在浮体外表面行走可靠性差,不能很好的完成对浮体的清洁操作。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明的实施例提出一种浮体清洁机器人,该浮体清洁机器人具有在浮体外表面行走可靠性高,清洁成本和危险性低的优点。
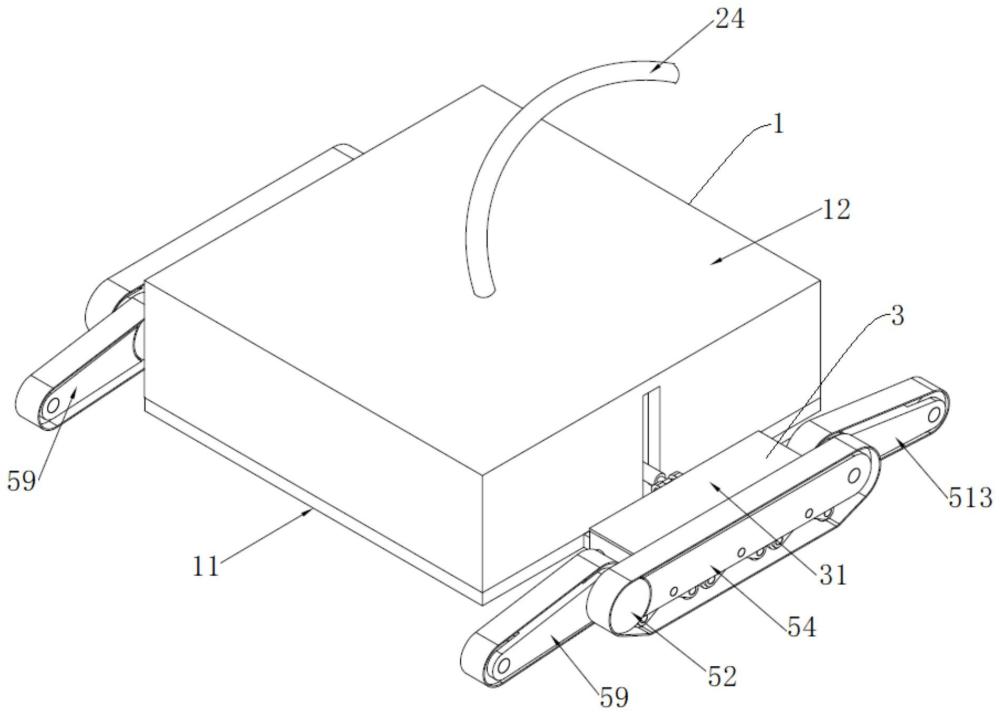
3、本发明实施例的浮体清洁机器人包括机体、清洁模块、动力模块、锁紧机构和行走机构,所述清洁模块安装于所述机体;所述动力模块有两个并分别位于所述机体沿第一方向相对的两侧,所述动力模块与所述机体可枢转地相连,所述动力模块的枢转轴线所在方向与所述第一方向垂直;所述锁紧机构能够在任意所述动力模块相对所述机体枢转至任意位置时锁紧所述动力模块和所述机体;所述行走机构有两个并与所述动力模块一一对应,所述行走机构包括第一履带组、第二履带组和第三履带组,所述第一履带组安装在相应所述动力模块上并具有沿第二方向相对的第一端和第二端,所述第二方向与所述动力模块的枢转轴线所在方向一致,所述第二履带组与所述第一履带组的第一端可枢转地相连,所述第三履带组与所述第一履带组的第二端可枢转地相连,所述第二履带组和所述第三履带组能够自适应调节与所述第一履带组之间的角度并和所述第一履带组同速移动,所述动力模块与所述第一履带组、所述第二履带组和所述第三履带组中的至少一者传动相连。
4、根据本发明实施例的浮体清洁机器人,设置每个行走机构中的第二履带组和第三履带组分别与第一履带组的两端可枢转地相连,在第一履带组行走在浮体的不规则外表面时,第二履带组件和第三履带组件总能够自适应调节与第一履带组之间的角度,以使第二履带组件和第三履带组件同时与浮体外表面接触,由此保证行走机构与浮体外表面之间具有足够的接触面积和摩擦力。同时,通过设置两个动力模块相对机体可枢转,能够调节第一至第三履带组件的下表面与另一行走机构中第一至第三履带组件的下表面之间的角度来适应浮体的不规则外表面,以保证任一第一至第三履带组件的下表面与浮体外表面具有更大的接触面积,使得浮体清洁机器人在浮体外表面上的行走可靠,跨障能力强,能够按设计路线自动、可靠地实现对浮体的清洁,清洁成本低、安全性高。
5、在一些实施例中,所述锁紧机构包括两个电动推杆,所述电动推杆与所述动力模块一一对应,所述电动推杆的本体与相应所述动力模块可枢转地相连,所述电动推杆的推杆与所述机体可枢转地相连。
6、在一些实施例中,所述第一履带组件包括依次传动相连的第一主动轮、第一履带和第一从动轮,所述第二履带组件包括依次传动相连的第二主动轮、第二履带和第二从动轮,所述第三履带组件包括依次传动相连的第三主动轮、第三履带和第三从动轮;
7、所述动力模块与所述第二主动轮和所述第三主动轮中的每一者传动相连,所述第二主动轮与所述第一主动轮同轴相连,所述第三主动轮与所述第一从动轮同轴且相对所述第一从动轮可枢转。
8、在一些实施例中,所述动力模块包括动力箱,所述动力箱与所述机体可枢转地相连;
9、所述第一履带组件还包括第一支架,所述第一支架与所述动力箱相连并位于所述动力箱背离所述机体的一侧,所述第一主动轮和所述第一从动轮转动安装于所述第一支架,所述第二履带组件还包括第二支架,所述第二主动轮和所述第二从动轮转动安装于所述第二支架,所述第三履带组件还包括第三支架,所述第三主动轮和所述第三从动轮转动安装于所述第三支架,所述第二支架和所述第三支架分设于所述动力箱沿所述第二方向相对的两侧。
10、在一些实施例中,所述第一履带、所述第二履带和所述第三履带中的每一者的外周面设有多个沿周向间隔排列的磁铁。
11、在一些实施例中,所述第一履带组件还包括安装于所述第一支架的多个支撑轮,所述支撑轮与所述第一履带传动相连,多个所述支撑轮的高度相同并沿所述第二方向间隔排列在所述第一主动轮和所述第一从动轮之间,所述支撑轮的下沿低于所述第一主动轮和所述第一从动轮的下沿。
12、在一些实施例中,所述动力模块还包括:
13、驱动电机,所述驱动电机安装于所述动力箱内;和
14、传动杆,所述传动杆与所述驱动电机的转轴传动相连,所述传动杆沿所述第二方向延伸,所述传动杆的两端凸出于所述动力箱沿所述第二方向相对的两侧,所述传动杆的两端分别与所述第二主动轮和所述第三主动轮传动相连。
15、在一些实施例中,所述清洁模块包括:
16、环形电机,所述环形电机安装于所述机体;
17、硬毛刷,所述硬毛刷沿高度方向延伸并位于所述机体的下方,所述环形电机与所述硬毛刷传动相连,所述硬毛刷在伸展状态下的下端高度低于所述第一履带组、所述第二履带组和所述第三履带组中每一者的最低高度;和
18、空化射流生成器,所述空化射流生成器安装于所述机体并位于所述硬毛刷的圆心位置。
19、在一些实施例中,所述机体包括相连的底座和上壳,所述底座和所述上壳限定出容置腔,所述空化射流生成器的部分和所述环形电机位于所述容置腔内,所述底座设有安装孔,所述空化射流生成器的喷射端配合在所述安装孔并适于向下射流;
20、所述清洁模块还包括供水管,所述供水管的第一端穿过所述安装孔并与所述空化射流生成器的进水端相连。
21、在一些实施例中,所述上壳由透明材质制成,所述浮体清洁机器人还包括相机,所述相机安装于所述容置腔内。
技术特征:1.一种浮体清洁机器人,其特征在于,包括:
2.根据权利要求1所述的浮体清洁机器人,其特征在于,所述锁紧机构包括两个电动推杆,所述电动推杆与所述动力模块一一对应,所述电动推杆的本体与相应所述动力模块可枢转地相连,所述电动推杆的推杆与所述机体可枢转地相连。
3.根据权利要求1所述的浮体清洁机器人,其特征在于,所述第一履带组件包括依次传动相连的第一主动轮、第一履带和第一从动轮,所述第二履带组件包括依次传动相连的第二主动轮、第二履带和第二从动轮,所述第三履带组件包括依次传动相连的第三主动轮、第三履带和第三从动轮;
4.根据权利要求3所述的浮体清洁机器人,其特征在于,所述动力模块包括动力箱,所述动力箱与所述机体可枢转地相连;
5.根据权利要求4所述的浮体清洁机器人,其特征在于,所述第一履带、所述第二履带和所述第三履带中的每一者的外周面设有多个沿周向间隔排列的磁铁。
6.根据权利要求4或5所述的浮体清洁机器人,其特征在于,所述第一履带组件还包括安装于所述第一支架的多个支撑轮,所述支撑轮与所述第一履带传动相连,多个所述支撑轮的高度相同并沿所述第二方向间隔排列在所述第一主动轮和所述第一从动轮之间,所述支撑轮的下沿低于所述第一主动轮和所述第一从动轮的下沿。
7.根据权利要求3所述的浮体清洁机器人,其特征在于,所述动力模块还包括:
8.根据权利要求1所述的浮体清洁机器人,其特征在于,所述清洁模块包括:
9.根据权利要求8所述的浮体清洁机器人,其特征在于,所述机体包括相连的底座和上壳,所述底座和所述上壳限定出容置腔,所述空化射流生成器的部分和所述环形电机位于所述容置腔内,所述底座设有安装孔,所述空化射流生成器的喷射端配合在所述安装孔并适于向下射流;
10.根据权利要求9所述的浮体清洁机器人,其特征在于,所述上壳由透明材质制成,所述浮体清洁机器人还包括相机,所述相机安装于所述容置腔内。
技术总结本发明公开一种浮体清洁机器人,浮体清洁机器人包括机体、清洁模块、动力模块、锁紧机构和行走机构,动力模块与机体可枢转地相连,动力模块的枢转轴线所在方向与第一方向垂直,锁紧机构能够在任意动力模块相对机体枢转至任意位置时锁紧动力模块和机体,行走机构包括第一履带组、第二履带组和第三履带组,第一履带组安装在相应动力模块,第二履带组和第三履带组分别与第一履带组的两端可枢转地相连,第二履带组和第三履带组能够自适应调节与第一履带组之间的角度并和第一履带组同速移动,动力模块与第一履带组、第二履带组和第三履带组中的至少一者传动相连。本发明提供的浮体清洁机器人具有在浮体外表面行走可靠性高,清洁成本和危险性低的优点。技术研发人员:李易初,刘孟孟,练继建,姚烨,崔益鸣,王婷,梁镇宇,林宝玉,孙慧丽,李庆彬,张庆海受保护的技术使用者:天津绿动未来能源管理有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223633.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种船用防撞条的制作方法
下一篇
返回列表