一种用于无人艇的布放回收装置和回收方法与流程
- 国知局
- 2024-08-01 06:33:12
本发明涉及无人艇,具体涉及一种用于无人艇的布放回收装置和回收方法。
背景技术:
1、近年来,各国政府和各方企业都对海洋资源的开发倾注了极大的人力物力,我国也适时地提出了海洋强国的战略,将发展船舶技术以及开发海洋资源提升到了国家战略层面。
2、无人水面艇(unmanned surface vehicle,usv)是一种集环境感知、路径规划、导航控制功能为一体的无人水面平台,通过搭载相应任务载荷,能够执行不同的任务,尤适用于各种危险、重复及其他不适于有人船艇执行的任务场景,是国家经略海洋的一个重要手段。但因其体量小、携带能源有限,一般由母船携带并通过收放装置投送至特定的海域执行相应任务。系统等其完成使命后,通常需要回收到搭载平台上,以补充能源、下载数据、维护保养和重新设置使命。其执行任务适应能力非常强,且相关的研究依然在不断深入。
3、当前无人艇的布放与回收一般在慢航速与低海况下人工操作进行,存在较大风险且效率低。高效、安全、可靠的无人艇自主布放和回收系统是无人艇推广使用亟需突破的瓶颈。
4、专利cn 108163149 b提出了一种无人艇布放回收系统,该无人艇布放回收系统包括与母船的吊索连接的对接头和安装于无人艇上的弹射机构、弹射头、云台机构、对接机构和牵引线。该系统能够降低海况恶劣时无人艇收放时的难度,但是这种弹射机构仅能实现单次抛射,一旦抛射时无人艇平台遭受突然的风浪,就可能造成抛绳的失败,该装置也就无法发挥作用。
5、因此,目前亟需解决抛绳失败后无人艇平台的回收问题。
技术实现思路
1、本发明提出了一种用于无人艇的布放回收装置和回收方法,目的在于:在无人艇执行任务过程中,本发明能够解决无人艇布放回收的难题,在恶劣的海况下也能够顺利完成母船对无人艇的高效、准确的布放回收,从而极大地节省了无人艇难以回收的时间成本和无法回收可能造成的任务失败的问题。
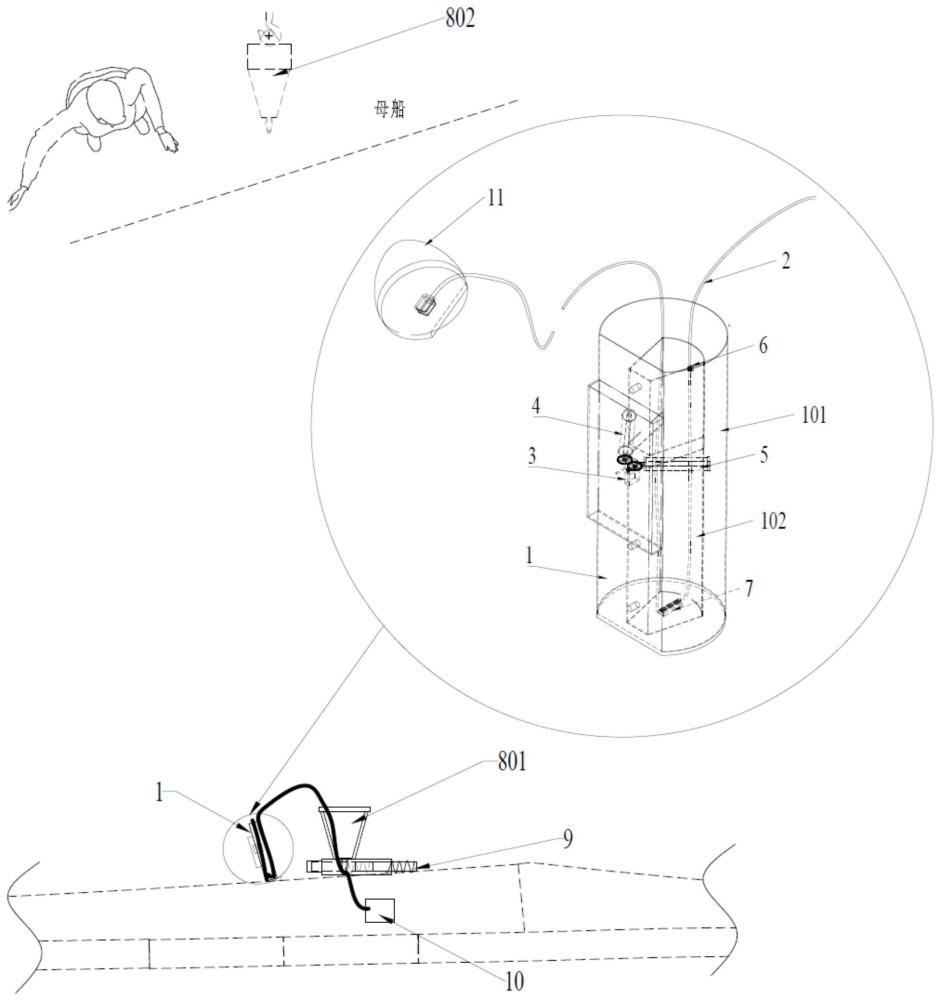
2、为实现上述目的,本发明的技术方案是:一种用于无人艇的布放回收装置,所述布放回收装置包括抛绳器、牵引绳、转筒换向机构、第一转筒、第二转筒、第一夹紧机构、第二夹紧机构、吊艇对接装置、自动收绳装置和牵引重物;
3、所述转筒换向机构安装在所述抛绳器内部;所述第一转筒和所述第二转筒的连接端分别与所述转筒换向机构相连,且所述抛绳器斜架在无人艇上,安装所述转筒换向机构的一侧朝下;在所述转筒换向机构驱动下,所述第一转筒和所述第二转筒分别以连接端为中心反向摆动;所述第一转筒和所述第二转筒夹紧所述牵引绳时,通过向所述牵引绳方向同步旋转能够回收所述牵引绳;所述第一夹紧机构安装在所述抛绳器内上部,位于与所述转筒换向机构相对的一侧;所述第二夹紧机构安装在所述抛绳器内底部;所述抛绳器上方具有开口;
4、所述吊艇对接装置包括子对接装置和母对接装置;所述子对接装置固定在所述无人艇平台上,且所述抛绳器和所述自动收绳装置分别位于所述子对接装置附近;所述母对接装置固定在母船上起吊装置的吊钩上;所述子对接装置与所述母对接装置连接后,所述无人艇通过所述起吊装置起吊来进行布放回收;
5、所述自动收绳装置安装在所述无人艇上;所述牵引绳一端与所述自动收绳装置固定连接,另一端先经过所述子对接装置再由所述抛绳器上方开口进入所述抛绳器内,依次经过所述第一夹紧机构和所述第二夹紧机构与所述牵引重物相连;所述无人艇布放时,所述牵引重物置于所述开口处,回收所述无人艇时,所述牵引重物在抛射装置的作用下向母船做抛绳动作。
6、进一步地,所述抛绳器包括间隔设置的抛绳器外壁和抛绳器内部套筒;所述抛绳器内部套筒由上下间隔设置的上部和下部组成,所述上部和所述下部分别固定在所述抛绳器外壁内;
7、所述第一夹紧机构设置在所述抛绳器内部套筒内的上部,所述第二夹紧机构设置在所述抛绳器内部套筒内的底端;
8、所述转筒换向机构在所述抛绳器内部套筒上部与下部之间安装在所述抛绳器外壁内部;所述第一转筒和所述第二转筒对称匹配在所述抛绳器内部套筒上部与下部的间隔两侧,所述第一转筒和所述第二转筒摆动换向时经过所述间隙进出所述抛绳器内部套筒;所述牵引绳收在所述抛绳器内部套筒中。
9、进一步地,所述布放回收装置还包括伺服机构插销;所述伺服机构插销设置在所述子对接装置下方;所述母对接装置下方具有销孔;所述母对接装置插入所述子对接装置内,且所述销孔穿过所述子对接装置底端,所述伺服机构插销通过所述销孔连接所述子对接装置和所述母对接装置。
10、进一步地,所述布放回收装置还包括控制系统;所述控制系统与所述转筒换向机构、所述第一转筒、所述第二转筒、所述第一夹紧机构、所述第二夹紧机构、所述伺服机构插销和所述自动收绳装置分别信号相连。
11、进一步地,所述吊艇对接装置整体呈由上向下逐渐收缩的圆锥结构。
12、进一步地,所述母对接装置下方设有金属环,用于回收时绑定所述牵引绳。
13、进一步地,所述转筒换向机构包括电机、主动齿轮和两个从动齿轮;两个所述从动齿轮啮合相连,并与所述第一转筒和所述第二转筒分别相连;所述主动齿轮与其中一个所述从动齿轮啮合连接;所述电机用于驱动所述主动齿轮旋转。
14、本发明还公开了一种根据上述中任一项所述的用于无人艇的布放回收装置进行的无人艇回收方法,包括如下步骤:
15、s1、所述无人艇到达设定的回收区域,达到预设的抛射条件时,转筒换向机构控制第一转筒和第二转筒张开,退出抛绳器内部套筒内部,牵引重物在抛射装置的作用下,拉着牵引绳抛向母船;
16、所述牵引绳未能抛上母船时,所述转筒换向机构驱动所述第一转筒和所述第二转筒靠拢夹紧所述牵引绳,所述第一转筒与所述第二转筒同时向所述牵引绳方向旋转,将所述牵引绳收至抛绳器内部套筒中,所述牵引重物归位,所述转筒换向机构驱动所述第一转筒和所述第二转筒张开,移出所述抛绳器内部套筒内部,准备再次抛绳,直至抛绳成功;
17、s2、所述牵引绳抛上母船后,与母对接装置下部的金属环绑定;
18、s3、第一夹紧机构与第二夹紧机构解除对牵引绳的约束,自动收绳装置启动回收所述牵引绳,所述牵引绳拉着母对接装置与无人艇上的子对接装置接近,直至所述母对接装置完全插入所述子对接装置内,所述自动收绳装置收绳完毕,伺服机构插销固定连接子对接装置和母对接装置;母船上的起吊装置将无人艇吊至母船。
19、本发明的有益效果是:
20、本发明结构简单,便于实现,对工艺、技术要求不高,在回收无人艇时能够实现多次抛绳,抛绳难度低,不仅避免了在抛绳失败后需要工作人员亲自上艇对接的问题,有效地提升了操作时的安全性,而且能够克服高海况下无人艇姿态不易控制,无法快速准确对接的难题,有效提升无人艇任务执行效率,促进我国无人艇领域的发展,有望在救援、运输、测绘以及勘探等诸多任务场景中予以应用,应用范围较广。
21、本发明通过转筒换向机构控制第一转筒和第二转筒摆动,在抛绳失败时,两个转筒能够夹紧牵引绳,在第一转筒和第二转筒同步向内旋转的作用下带动牵引绳有序回收至抛绳器内部套筒内。
22、本发明的抛绳器斜架在无人艇上,安装转筒换向机构的一侧朝下,保证在回收牵引绳时,牵引绳进入第一转筒和第二转筒之间,保证牵引绳与转筒接触。
23、本发明中设置的夹紧机构可保证牵引绳进入抛绳器内部套筒内部后按预定方向延伸。
24、本发明通过控制系统能够在母船上遥控无人艇的回收,避免了传统需要工作人员亲自上艇对接等人工干预,有效地提升了操作时的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224210.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表