一种无人超高速舰艇姿态自适应调节方法及装置与流程
- 国知局
- 2024-08-01 06:35:41
本发明涉及无人艇,特别涉及一种无人超高速舰艇姿态自适应调节方法及装置。
背景技术:
1、超高速无人艇是无人艇的发展方向之一,随着动力装置升级为航空发动机其速度得到了空前的提高。然而无人舰艇由于吨位小,受到自身运动因素和诸多环境因素的影响,常常导致船体产生摇摆运动,船体的剧烈摇摆会严重影响到舰船的性能,对于军舰来说剧烈的摇荡会严重影响军舰战斗力的发挥,降低舰炮与导弹的命中率,甚至导致舰船倾覆。船舶姿态调节目的为研究船舶的减摇,其中横摇对船体性能影响最大,通过控制船体的横摇,使船舶运动过程中保持良好的运动姿态。目前减摇措施分为被动式和主动式,其中被动式有:舭龙骨、减摇水舱等;主动式:减摇鳍、减摇陀螺等。因此无人艇如何在超高速航行过程中调整姿态成为重要研究内容之一。
技术实现思路
1、鉴于上述分析,本公开提供一种无人超高速舰艇姿态自适应调节方法及装置,用于减缓横摇,保证无人艇在超高速航行过程中保持最佳性能。
2、本公开提供的无人超高速舰艇姿态自适应调节方法,主要包括以下步骤:
3、s1,由惯导实时检测船体的横摇信息θ(t),采样频率为qhz,θ为船体横摇角度;
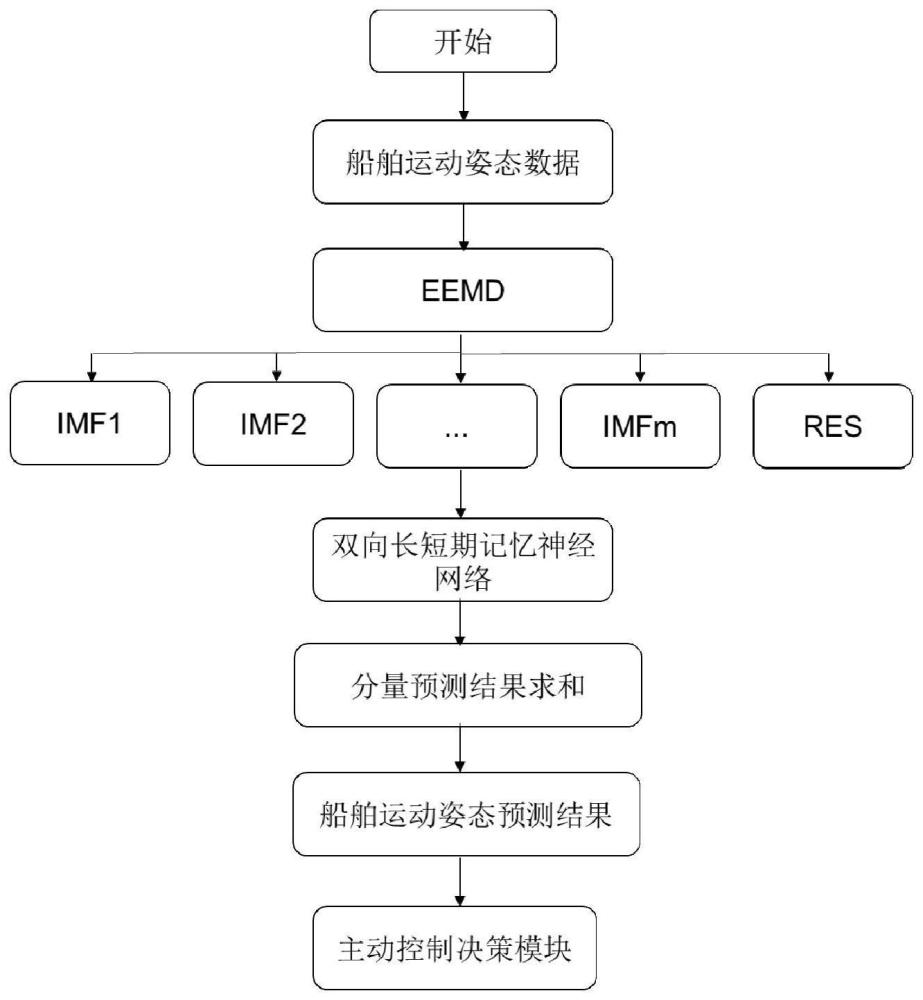
4、s2,根据获得的横摇信息θ(t),通过改进的经验模态分解方法eemd对摇摆信号进行分解,得到不同频段本征模函数imf的摇摆角度、周期信息;
5、s3,构建双向长短期记忆神经网络,对各imf分量进行预测,求和得到预测的摇摆信息θ'(t);
6、s4,根据预测得到的摇摆信息θ'(t),控制减摇鳍的转速、减摇陀螺,进而做到减缓横摇。
7、应用以上方法的无人超高速舰艇姿态自适应调节装置,主要包括:摇摆信息采集系统、摇摆信息预测模块、主动控制决策模块;其中:
8、摇摆信息采集模块,利用惯导实时检测船体的摇摆信息θ(t),θ为船体横摇角度,并将横摇信息θ(t)传送至摇摆信息预测模块;
9、摇摆信息预测模块,根据接收到横摇信息θ(t),通过改进的经验模态分解方法对摇摆信号进行分解,得到不同频段本征模函数imf的摇摆角度、周期信息;并利用双向长短期记忆神经网络,对各imf分量进行预测,求和得到预测的摇摆信息θ'(t);
10、主动控制决策模块,根据预测得到的摇摆信息θ'(t),控制减摇陀螺飞轮以及减摇鳍的转速,做到减缓横摇。
11、与现有技术相比,本公开的有益效果是:(1)建立自适应预测模型,能够根据实时的船体横摇信息,对横摇信息进行预测;(2)根据预测摇摆信息,控制作出相应减摇动作;(3)使无人舰艇超高速航行过程中自适应调节舰艇姿态,保持舰上各类设备性能可靠,避免船体出现大角度横摇,甚至倾覆。
技术特征:1.一种无人超高速舰艇姿态自适应调节方法,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述步骤s2包括:
3.根据权利要求2所述的方法,其特征在于,所述步骤s3包括:
4.根据权利要求3所述的方法,其特征在于,所述步骤s33包括:
5.根据权利要求1所述的方法,其特征在于,所述步骤s4包括:
6.一种应用权利要求1-5中任一所述方法的无人超高速舰艇姿态自适应调节装置,其特征在于,包括:摇摆信息采集模块,摇摆信息预测模块,主动控制决策模块;其中:
技术总结一种无人超高速舰艇姿态自适应调节方法及装置,其实时采集船体的横摇信息,建立自适应预测模型,对横摇信息进行预测,根据预测摇摆信息,作出相应减摇动作。该方法及装置能使无人舰艇在超高速航行过程中自适应调节舰艇姿态,保持舰上各类设备性能可靠,避免船体出现大角度横摇,甚至倾覆。技术研发人员:崔浩洋,李明,丁洋坤,张鹏,赵博园,米有杰,李宇航受保护的技术使用者:河北汉光重工有限责任公司技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/224425.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表