一种基于先验地图的干散货船舱自动驾驶清舱机的制作方法
- 国知局
- 2024-08-01 06:44:44
本发明主要涉及清舱机相关,具体是一种基于先验地图的干散货船舱自动驾驶清舱机。
背景技术:
1、目前对于装有干散货的船舱多采用门机,装载机,挖掘机三者联合作业的方式进行清理,门机清理中间部位货物,挖掘机和装载机清理四周门机无法抓取到的货物,该过程必须有工作人员进入船舱,操作装载机和挖掘机进行作业,作业效率较低,且船舱内货物松散不一,高低不平,粉尘较大,十分考验工作人员的操作水平,稍有不慎就可能造成重大事故,并且挖掘机在由于机械结构的影响,转弯较为困难,作业效率低下。
2、当前的清理方式严重依赖人力,清理效率较低,由于船舱内部环境较恶劣,对操作人员身体健康产生严重的危害,且容易因为误操作刮蹭船舱壁,装载机推斗只能依靠自身的推力向前推动货物,且转弯困难,作业效率低下,且由于船舱环境复杂,对感知和定位模块的计算资源消耗较大,实现自动驾驶较为困难。
技术实现思路
1、为解决目前技术的不足,本发明结合现有技术,从实际应用出发,提供一种基于先验地图的干散货船舱自动驾驶清舱机,本清舱机具备自动驾驶的功能,可以替代装载机和挖掘机,解放人力,提高作业效率,并提高作业的安全性。
2、本发明的技术方案如下:
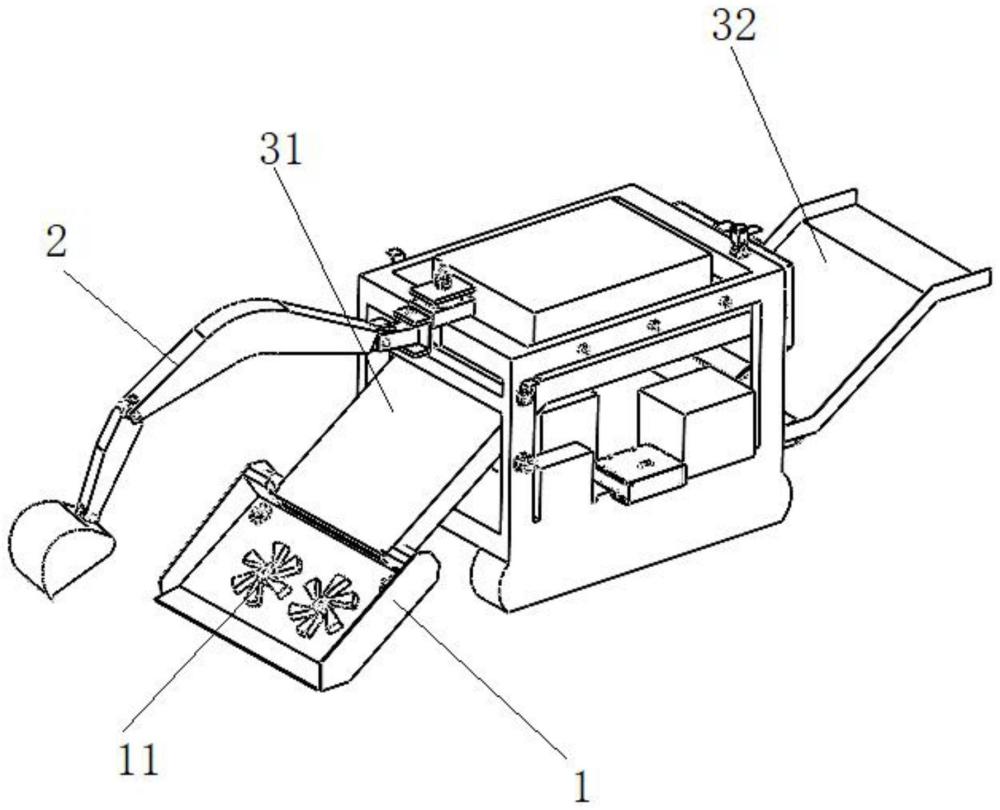
3、一种基于先验地图的干散货船舱自动驾驶清舱机,包括运铲机构、运输机构、机械臂机构,清舱机的自动驾驶系统采用主工控机、副工控机结构,运铲机构、运输机构、机械臂机构通过车端控制器与主工控机连接,主工控机负责任务调度以及路径规划,副工控机负责感知和定位模块的计算,清舱机的自动驾驶系统基于先验地图进行路径规划,并通过感知模块感知前后左右的货物情况,根据货物情况分发任务,通过对运铲机构、运输机构、机械臂机构控制进行铲料,放高,路径规划的动作。
4、进一步,先验地图模块首先对船舱的大小,形状进行提前建模,并输入给自动驾驶系统使用,先验地图采用三维绘制与激光雷达离线采集的方式进行融合;三维绘制采用solidworks根据图纸尺寸按照1:1进行绘制,并转成点云使用,激光雷达离线采集采用slam技术进行点云采集,然后融合匹配得到最终的先验地图。
5、进一步,清舱机布置多个雷达、全景摄像头以及1个gnss组合导航对环境无死角感知,雷达信号连接于交换机,全景摄像头信号通过poe网关连接于交换机,gnss信号连接于副工控机,交换机与主工控机以及副工控机通讯。
6、进一步,所述清舱机配置有远程座舱,远程座舱通过自组网电台与交换机连接,在出现异常情况或出现清舱机无法完成的任务时,清舱机会停止并请求远程接管或由人主动接管,通过远程操作的方式操作清舱机完成任务。
7、进一步,所述运铲机构采用四扒齿设计,两个直径500mm的扒齿处于中间对称分布用于将运铲上的物料推送到运输机构,两个直径100mm的扒齿位于运铲角落,用于清理运铲角落的货物。
8、进一步,所述运铲机构倾角可在10-45度范围内调整,运铲机构两侧挡板可0-180度翻转。
9、进一步,所述运输机构采用二级传送带进行物料输送,传送带设计有立式条纹,条纹高14.8mm,呈倒钩状,角度为75度。
10、进一步,所述机械臂机构采用四关节设计,末端关节装有挖斗,用于处理高处的料堆。
11、本发明的有益效果:
12、1、本发明设计了运铲单元,硬件采用双工控机设计,并使用了三维建模与激光雷达slam建图融合的方式构建先验地图,具备自动驾驶的功能,可以替代装载机和挖掘机,解放人力,提高作业效率,并提高作业的安全性。
13、2、本发明机械结构的运铲部分设计有四个扒齿,且侧面挡板可翻转,能够有效实现货物的清理。
14、3、本发明硬件部分采用了双工控机设计,能够提高计算效率,提高系统的稳定性。
15、4、本发明控制部分使用了三维绘制的点云与激光雷达点云融合的方式构建先验地图,可以提高地图精度。
技术特征:1.一种基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,包括运铲机构、运输机构、机械臂机构,清舱机的自动驾驶系统采用主工控机、副工控机结构,运铲机构、运输机构、机械臂机构通过车端控制器与主工控机连接,主工控机负责任务调度以及路径规划,副工控机负责感知和定位模块的计算,清舱机的自动驾驶系统基于先验地图进行路径规划,并通过感知模块感知前后左右的货物情况,根据货物情况分发任务,通过对运铲机构、运输机构、机械臂机构控制进行铲料,放高,路径规划的动作。
2.根据权利要求1所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,先验地图模块首先对船舱的大小,形状进行提前建模,并输入给自动驾驶系统使用,先验地图采用三维绘制与激光雷达离线采集的方式进行融合;三维绘制采用solidworks根据图纸尺寸按照1:1进行绘制,并转成点云使用,激光雷达离线采集采用slam技术进行点云采集,然后融合匹配得到最终的先验地图。
3.根据权利要求1所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,清舱机布置多个雷达、全景摄像头以及1个gnss组合导航对环境无死角感知,雷达信号连接于交换机,全景摄像头信号通过poe网关连接于交换机,gnss信号连接于副工控机,交换机与主工控机以及副工控机通讯。
4.根据权利要求3所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,所述清舱机配置有远程座舱,远程座舱通过自组网电台与交换机连接,在出现异常情况或出现清舱机无法完成的任务时,清舱机会停止并请求远程接管或由人主动接管,通过远程操作的方式操作清舱机完成任务。
5.根据权利要求1所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,所述运铲机构采用四扒齿设计,两个直径500mm的扒齿处于中间对称分布用于将运铲上的物料推送到运输机构,两个直径100mm的扒齿位于运铲角落,用于清理运铲角落的货物。
6.根据权利要求1所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,所述运铲机构倾角可在10-45度范围内调整,运铲机构两侧挡板可0-180度翻转。
7.根据权利要求1所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,所述运输机构采用二级传送带进行物料输送,传送带设计有立式条纹,条纹高14.8mm,呈倒钩状,角度为75度。
8.根据权利要求1所述的基于先验地图的干散货船舱自动驾驶清舱机,其特征在于,所述机械臂机构采用四关节设计,末端关节装有挖斗,用于处理高处的料堆。
技术总结本发明提供一种一种基于先验地图的干散货船舱自动驾驶清舱机,包括运铲机构、运输机构、机械臂机构,清舱机的自动驾驶系统采用主工控机、副工控机结构,运铲机构、运输机构、机械臂机构通过车端控制器与主工控机连接,主工控机负责任务调度以及路径规划,副工控机负责感知和定位模块的计算,清舱机的自动驾驶系统基于先验地图进行路径规划,并通过感知模块感知前后左右的货物情况,根据货物情况分发任务,通过对运铲机构、运输机构、机械臂机构控制进行铲料,放高,路径规划的动作。本清舱机具备自动驾驶的功能,可以替代装载机和挖掘机,解放人力,提高作业效率,并提高作业的安全性。技术研发人员:黄琰,陈庆伟,冯冲,申永刚受保护的技术使用者:理工雷科智途(北京)科技有限公司技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/224897.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表