一种仿生救援机器鱼
- 国知局
- 2024-08-01 06:47:33
本发明涉及仿生鱼的,特别是涉及一种仿生救援机器鱼。
背景技术:
1、早在19世纪,水下机器人领域涌现出auv(autonomous underwater vehicle,自主型水下机器人)和rov(remotely operatedvehicle,遥控型水下机器人)等热门的研究方向。但随着人们对鱼类游动机制的研究,发现这些传统的水下机器人具有明显的不足,这些传统的水下机器人大多采用螺旋桨的推进形式,其往往具有噪声大、控制系统复杂、体积庞大、推进效率低等缺点。为此,人们从鱼类的游动机制出发,将鱼类的生物学原理与机械控制相结合,提出一种基于仿生学原理的水下机器人—仿生机器鱼。
2、现在仿生机器鱼常用的浮潜方法有:胸鳍法、形状改变法、储水仓法以及重心改变法。胸鳍法是利用胸鳍的摆动,改变流体推力的方向,从而实现上浮和下潜;形状改变法是改变仿生机器鱼自身的体积,从而改变浮力的大小,完成上浮和下潜运动;储水仓法是改变仿生机器鱼的自重,从而完成上浮和下潜运动;重心改变法是利用重心的偏移,改变仿生机器鱼鱼头的俯仰角,从而完成上浮和下潜运动。
3、当前市面上多数仿生机器鱼采用多关节舵机串联的驱动形式去拟合鱼体波曲线,即一个舵机驱动一个关节,通过驱动每一个舵机的转动角度控制鱼体的摆动幅度,以此来模拟真实鱼类的身体波动。一定程度上这种方法已经很接近鱼类游动的体态,但这种方式对驱动电机的同步性要求很高,且随着关节数的增多,驱动电机的数量也随之增加,往往会造成控制结构越来越复杂,功耗也在增加。此外也有一部分仿生机器鱼采用液(气)压驱动的形式控制鱼体的摆动。这种仿生机器鱼需要建立完整的液(气)压驱动系统,利用液(气)压阀和电子换向阀控制液(气)压缸内活塞的运动来实现机器鱼的运动控制。这类机器鱼具有扭矩较大、控制过程精确的特点,但是整个驱动系统非常复杂。
4、海上钻井平台、桥梁等水下建筑很容易受到海水的侵蚀,对建筑结构造成一定的损伤;同时,由于水下建筑的数据集较少,大部分神经网络训练出来的结果并不理想。目前水下机器人主要以螺旋桨推进的rov、auv机器人为主,其存在效率低、不灵活、体积庞大等缺点。在对鱼类游动实验观察中,我们发现鱼类的游动方式具有较高的推进效率以及鱼类具有较高的灵活性。传统电机驱动的仿生机器鱼主要以多关节串联的驱动方式为主,即一个关节由一个电机驱动,但随着关节数的增加,电机的数量也在增加,虽然这会使得鱼尾的波动与鱼体波动曲线接近,但这也增加了控制难度。
5、其次,现有的仿生机器鱼大多运用于实验测试、水质检测、鱼群检测、水下管道检测等领域,使用场景较为局限。
6、再者,为了实现仿生机器鱼的上浮和下潜,人们设计了多种方案来实现这种功能,其中较为常见的有储水仓法、胸鳍控制法、改变重心位置法等等,但这些方法或多或少存在一些不足。胸鳍控制法不能从功能上完全对鱼类进行仿生,实时性较差缺乏机动性,且难以进行动密封防水;储水仓法需要占据较大的空间,当到达一定的深度时,吸水放水的动作将受到水压的影响且采用丝杆推杆进行抽水和排水的方式效率比较低;重心改变法占用较大的内部空间,且效果甚微。此外,关于水下建筑以及水下遇难人员的图片较少,视觉处理网络训练处理的模型效果并不理想。
技术实现思路
1、本发明的目的是提供一种仿生救援机器鱼,以解决上述现有技术存在的问题,使机器鱼的机动性提升且具备救援功能。
2、为实现上述目的,本发明提供了如下方案:
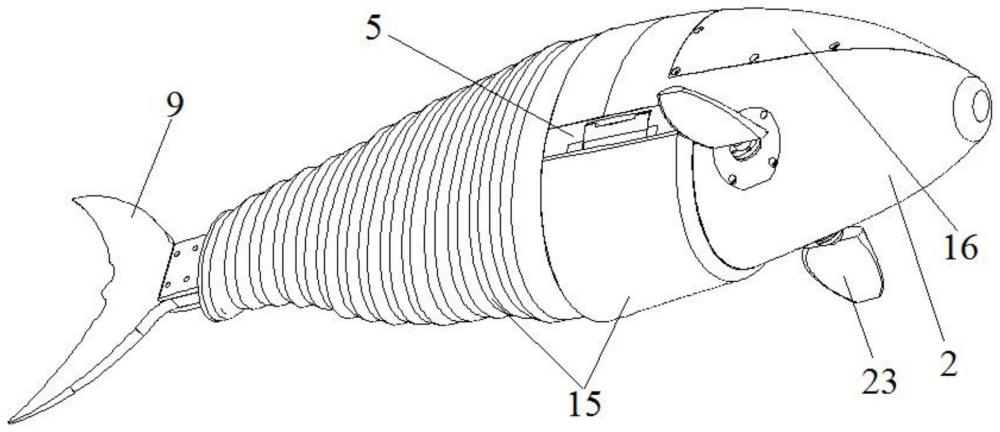
3、本发明提供了一种仿生救援机器鱼,包括鱼身骨架、鱼头骨架、鱼尾摆动机构和胸鳍摆动机构、救援机构和浮力调整机构,所述鱼身骨架与所述鱼头骨架活动连接,所述鱼头骨架上设置有所述鱼尾摆动机构、所述胸鳍摆动机构、所述救援机构和所述浮力调整机构,所述鱼身骨架和所述鱼头骨架的表面密封连接有仿生鱼皮,所述鱼尾摆动机构和所述胸鳍摆动机构、所述救援机构和所述浮力调整机构均与一控制单元通讯连接,所述救援机构能够释放救生气囊,所述浮力调整机构能够改变鱼肚体积。
4、优选的,所述鱼身骨架包括若干个仿形支撑片,所述仿形支撑片的外轮廓尺寸根据鱼外形尺寸设计,且由尾部至头部逐步变大,所述仿形支撑片的中部设置有一个或者一对铰接耳,相邻的所述仿形支撑片通过所述铰接耳与销轴铰接,最小的所述仿形支撑片上连接有柔性尾鳍,最大的所述仿形支撑片与所述鱼头骨架上的铰接耳铰接,最小的所述仿形支撑片与所述鱼头骨架的端部外密封连接有所述仿生鱼皮,形成仿生鱼身。
5、优选的,相邻的所述仿形支撑片之间固定连接有弹性片;所述仿生鱼皮为波纹管结构,所述仿形支撑片为椭圆形且下方设置有配重块,所述配重块的形状关于所述仿形支撑片的长轴对称设置且重心靠近鱼体中部。
6、优选的,所述鱼尾摆动机构包括步进电机、齿轮传动机构、拉线和拉线盘,所述拉线盘连接于所述齿轮传动机构的转轴上且垂直于所述柔性尾鳍上下对称设置有两个,每个所述拉线盘的两侧均通过拉线与最小的所述仿形支撑片上对应位置固定连接,所述步进电机与所述齿轮传动机构连接。
7、优选的,所述鱼头骨架的上部密封设置有透明的观察窗,所述观察窗内通过支架连接有彩色摄像头,所述观察窗为耐压玻璃盖且与所述鱼头骨架之间设置有密封圈;所述鱼头骨架上设置有密封仓和电池仓,所述密封仓内设置有所述控制单元,所述电池仓内设置有蓄电池,所述鱼头骨架的顶部设置有电源开关、两侧和前端部均设置有超声波传感器。
8、优选的,所述鱼头骨架的两侧对称设置有所述胸鳍摆动机构,所述胸鳍摆动机构包括两个防水舵机、两组齿轮传动机构和胸鳍,所述防水舵机分别与一组所述齿轮传动机构连接,每组所述齿轮传动机构的一个齿轮的转轴均通过联轴器与所述胸鳍连接,所述联轴器转动设置于一异形的防水块的通槽中,所述防水块的内部通过双唇密封圈与所述齿轮的转轴上的法兰盘连接,所述防水舵机能够使所述胸鳍以水平面为中心上下摆动30°-50°。
9、优选的,所述鱼头骨架的鱼肚部位设置有一u型槽,所述u型槽内依次设置有所述救援机构和所述浮力调整机构,所述浮力调整机构与所述u型槽的两侧壁和所述救援机构的底部密封连接有所述仿生鱼皮,所述仿生鱼皮具有弹性,所述浮力调整机构能够使所述仿生鱼皮的体积发生变化。
10、优选的,所述救援机构的外形呈u型且包括底座、上盖、防水舵机、锥齿轮传动机构、开舱门机构、开气瓶机构、救生气囊和气瓶,所述底座与所述上盖通过螺栓密封连接,所述防水舵机通过所述锥齿轮传动机构分别与两侧的所述开舱门机构和所述开气瓶机构连接,所述底座的两侧对称铰接有一救生舱,所述救生舱上设置有所述开舱门机构,所述救生舱内分别密封设置有所述气瓶和折叠的所述救生气囊,所述气瓶的出气管上通过一三通分别与所述救生气囊的进气气嘴和顶针连接,所述顶针能够通过所述开气瓶机构打开所述气瓶与所述救生气囊连通的出气通道。
11、优选的,所述开舱门机构包括传动齿轮和与舱门固定连接的摆动齿轮,所述传动齿轮与所述锥齿轮传动机构的一个锥齿轮同轴设置,所述摆动齿轮固定连接于所述舱门的铰接轴上,所述传动齿轮与所述摆动齿轮啮合;所述开气瓶机构包括直齿轮和齿条,所述直齿轮与所述摆动齿轮同轴设置,所述齿条与所述直齿轮啮合,所述齿条滑动设与所述上盖的滑槽内,所述齿条上设置有一带倾角的凸块,所述凸块能够挤压所述顶针轴向移动打开出气通道;所述气瓶的外部通过螺纹连接有一保护套,所述保护套包括拼接为一整体的头部保护套和尾部保护套两部分,所述头部保护套上设置有所述顶针的限位孔。
12、优选的,浮力调整机构包括防水壳、防水舵机、变径机构和若干个仿形推板,所述仿形推板能够拼接成一个u型鱼肚,所述防水壳设置于所述u型鱼肚内部,所述防水壳内设置有所述防水舵机和所述变径机构,所述防水舵机连接有所述变径机构,所述防水舵机通过所述变径机构与所述仿形推板连接,所述仿形推板的外部包裹有所述仿生鱼皮,所述仿形推板通过所述变径机构能够向外扩展和向内收缩。
13、优选的,所述变径机构包括变径转盘和齿轮传动机构,所述防水舵机通过所述齿轮传动机构连接有所述变径转盘,每个所述仿形推板上均设置有一支撑杆,所述变径转盘的中部设置有若干个弧形的腰型孔,所述腰型孔的内端均位于同一个小半径同心圆、外端均位于同一大半径同心圆,且一个所述腰型孔对应一个所述支撑杆,每个所述支撑杆末端均通过销轴滑动设置于对应的所述腰型孔内,所述防水壳上设置有导向槽,所述支撑杆活动贯穿所述导向槽。
14、本发明相对于现有技术取得了以下技术效果:
15、本发明提出了一种以鲹科推进模式为主的新型仿生机器鱼,通过鱼尾和胸鳍摆动的驱动方式,能更真实地模拟鱼类的游动,从而获取更高的推进效率和灵活性;在结构上增加了救援机构和浮力调整机构,可用于水下救援等场景,浮力调整机构可模拟真实鱼鳔的作用机理,从而实现改变仿生机器鱼的重力与浮力的关系,使得仿生机器鱼能够实现上浮、下潜的功能。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225053.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。