一种双形态子母式水下仿生波动鳍推进装置
- 国知局
- 2024-08-01 06:49:53
本发明属于仿生水下机器人,具体涉及一种双形态子母式水下仿生波动鳍推进装置。
背景技术:
1、自然界中许多动物例如昆虫(蜜蜂、蚂蚁等)、鱼类、鸟类等都可以自我组织并创建结构来解决单个个体难以解决或者不可能完成的问题。紧急集群行为可以产生于个体通过代理之间的局部和有限的通信以及与环境的交互从而遵循相对简单的规则,进而完成相对个体难以完成的工作;并在个体发生故障时通过集群行为对个体进行支援。
2、目前水下机器人的研发设计层出不断,通过对自然界鱼类的运动进行研究和模仿,人们研制了一批具备水下高机动性能的水下仿生机器人,例如基于bcf(body-caudalfin)的水下仿生机器人和基于mpf(median-paired fin)的水下仿生机器人,都在水下展示出高机动性能,能够实现近乎鱼类的真实游动。然而在推进速度上不具备高速前行的能力,一方面受限于仿生程度仍达不到真实鱼类的能力,另一方面受波动形式的影响,无法达到高速的效果。
3、现有的高机动-高性能的水下机器人多为两套推进系统协同工作,一套推进系统负责保证机器人的高性能、另一套推进系统负责保证机器人的高速推进。这种机器人存在结构复杂、推进方式冗杂、控制复杂、高机动性和高效性难兼容以及效率低等问题。
技术实现思路
1、本发明的目的是解决现有的机器人结构复杂、推进方式冗杂、控制复杂、高机动性和高效性难兼容以及效率低的技术问题问题,而提供一种双形态子母式水下仿生波动鳍推进装置。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明提供一种双形态子母式水下仿生波动鳍推进装置,包括双形态子式水下仿生波动鳍推进装置和双形态母式水下仿生波动鳍推进装置,多个所述双形态子式水下仿生波动鳍推进装置通过对接组成双形态母式水下仿生波动鳍推进装置;
4、所述双形态子式水下仿生波动鳍推进装置包括头部对接单元、子波动鳍中空驱动单元、波动鳍面和尾部对接单元;
5、所述头部对接单元和尾部对接单元分别设置在子波动鳍中空驱动单元两端,所述波动鳍面设置在子波动鳍中空驱动单元两侧,所述子波动鳍中空驱动单元与波动鳍面的连接处设置有一个转动自由度,带动波动鳍面实现波动运动。
6、进一步的,所述尾部对接单元包括尾部导向定位件、尾部磁铁、凸轮、舵机、活动吊环和缓冲件;
7、所述尾部导向定位件设置在子波动鳍中空驱动单元一端,所述尾部磁铁设置在尾部导向定位件内,所述凸轮和舵机依次设置在尾部磁铁后端,所述活动吊环设置在尾部导向定位件内,所述缓冲件设置在活动吊环内。
8、进一步的,所述头部对接单元包括头部导向定位件、头部磁铁和连接件;
9、所述头部导向定位件设置在子波动鳍中空驱动单元另一端,所述头部磁铁设置在头部导向定位件内,所述连接件设置在头部导向定位件上,且与活动吊环相适配。
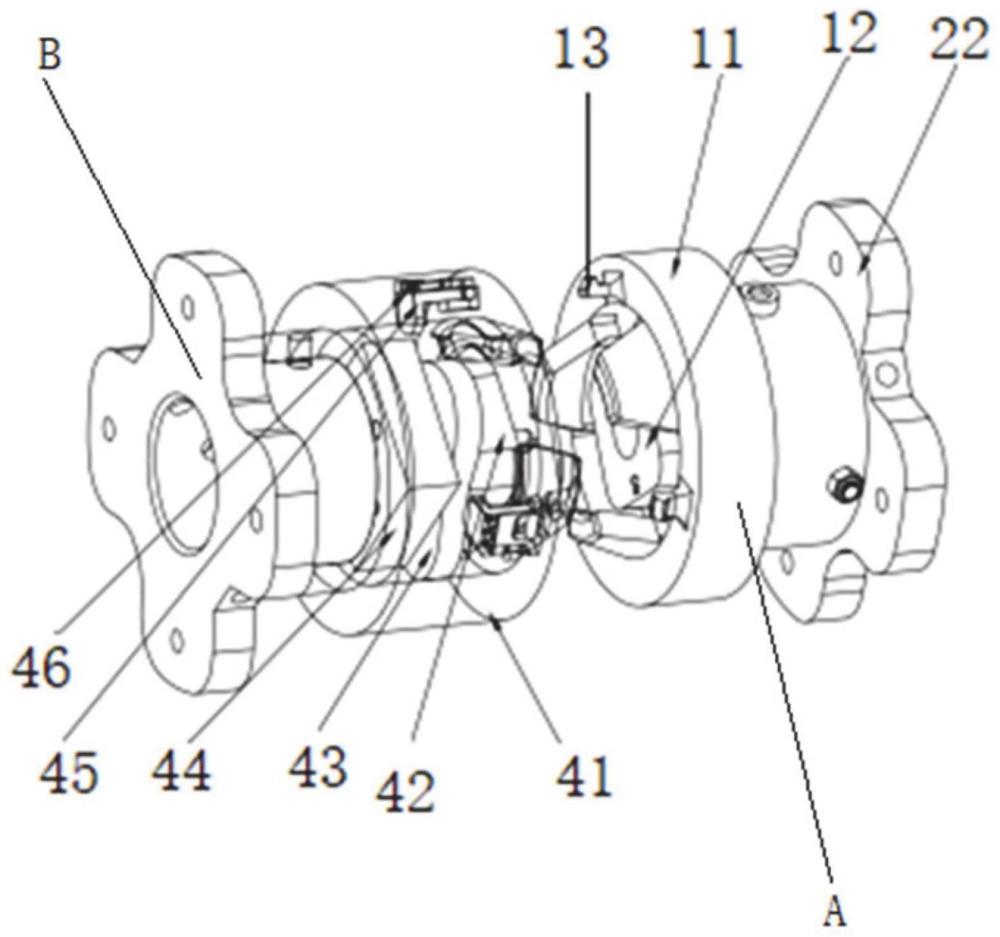
10、进一步的,所述子波动鳍中空驱动单元包括至少两个驱动组件和防水仓;所述防水仓设置在相邻两个所述驱动组件之间,通过贯穿插销连接。
11、进一步的,所述驱动组件包括电机定子连接件、中空防水电机、电机转子连接件、摆动鳍条和中空中轴;
12、所述电机定子连接件、中空防水电机、电机转子连接件和摆动鳍条均为两个,两个所述电机定子连接件设置在中空中轴两端,两个所述电机转子连接件设置在两个所述电机定子连接件内,且两个所述电机转子连接件相对设置,所述中空防水电机设置在电机定子连接件和电机转子连接件之间,所述摆动鳍条设置在电机转子连接件上。
13、进一步的,所述摆动鳍条包括转动轴钉、垫片、铜套、滚珠轴套和转动臂;
14、所述电机转子连接件上设置有圆形通孔,所述滚珠轴套和铜套由内而外依次套设在圆形通孔内,所述垫片和转动臂分别设置在圆形通孔上端和下端,所述转动轴钉由上而下依次穿过垫片滚珠轴套与转动臂活动连接。
15、进一步的,所述头部导向定位件上设置有多个第一定位叉,多个所述第一定位叉结构相同,多个所述第一定位叉与头部导向定位件固定连接。
16、进一步的,所述尾部导向定位件上设置有多个第二定位叉,多个所述第二定位叉结构相同,且与第一定位叉相适配,多个所述第二定位叉与尾部导向定位件固定连接。
17、进一步的,所述波动鳍面采用橡胶材料,在自然状态下呈扇形结构。
18、进一步的,多个所述子波动鳍中空驱动单元通过贯穿插销连接。
19、与现有技术相比,本发明具有以下有益的技术效果:
20、本发明一种双形态子母式水下仿生波动鳍推进装置,包括双形态子式水下仿生波动鳍推进装置和双形态母式水下仿生波动鳍推进装置,双形态子式水下仿生波动鳍推进装置通过对接组成双形态母式母式水下仿生波动鳍推进装置,可实现高速和高机动两种形态自由切换。双形态子式水下仿生波动鳍推进装置通过中空防水电机带动摆动鳍条进行类正弦波动,使得波动鳍面形成一个类似正弦波动的曲面,使该装置在水中完成前进、后退、原地转弯、上浮下潜一系列运动;双形态母式水下仿生波动鳍推进装置通过中空防水电机带动摆动鳍条在保持相位差的同时同步转动,使得波动鳍面形成螺旋状快速向后推水,实现高速运动;双形态母式水下仿生波动鳍推进装置由于外界因素导致某个双形态子式水下仿生波动鳍推进装置发生故障,其余的双形态子式水下仿生波动鳍推进装置完成任务,并将其带回,具有更可靠的执行力;同时头部磁铁和尾部磁铁因同名磁极相互排斥和异名磁极相互吸引,可将相邻两个子波动鳍中空驱动单元连接与断开。
技术特征:1.一种双形态子母式水下仿生波动鳍推进装置,其特征在于:
2.根据权利要求1所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
3.根据权利要求2所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
4.根据权利要求3所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
5.根据权利要求4所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
6.根据权利要求5所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
7.根据权利要求6所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
8.根据权利要求7所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
9.根据权利要求8所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
10.根据权利要求9所述的双形态子母式水下仿生波动鳍推进装置,其特征在于:
技术总结本发明属于仿生水下机器人技术领域,公开了一种双形态子母式水下仿生波动鳍推进装置,具体为双形态子式水下仿生波动鳍推进装置和双形态母式水下仿生波动鳍推进装置,多个双形态子式水下仿生波动鳍推进装置通过对接组成双形态母式水下仿生波动鳍推进装置,双形态子式水下仿生波动鳍推进装置包括头部对接单元、子波动鳍中空驱动单元、波动鳍面和尾部对接单元;头部对接单元包括头部导向定位件、头部磁铁和连接件,尾部对接单元包括尾部导向定位件、尾部磁铁、凸轮、舵机、活动吊环和缓冲件,整个装置简化了操作流程,提高了工作效率,具有高速和高机动两种形态,两种形态的切换使用,具备高机动完成任务的同时,也具有高速推进的能力。技术研发人员:胡桥,张豪,孙良杰,姜川,陈龙,曾杨彬受保护的技术使用者:西安交通大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/225221.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表