一种基于线翎电鳗的多运动模态仿生机器鱼
- 国知局
- 2024-08-01 06:51:01
本技术涉及仿生机器鱼,尤其涉及一种基于线翎电鳗的多运动模态仿生机器鱼。
背景技术:
1、在众多水下地形中,复杂幽深的水下洞穴历来是人类最难以涉足的水域之一,对水下洞穴的探索需求长期存在且日益增长。在目前的水下沉船、岩洞探测中,一般会采用rov机器人探测作为无人探测手段。使用水中机器人代替人员前往水下洞穴执行资源勘探、科学研究、环境监测、搜索救援任务,可以极大降低人类潜水员和海洋科考船的作业难度,其价值不言而喻。
2、在复杂的海洋地形环境种,传统的rov一般形状方正、体积较大,不便于通过曲折狭窄的通道。同时,rov通常使用螺旋桨作为主要推进方式,其桨叶易卷入水下茂盛的水草,使其在水草蔓延的水域执行任务时面临较大的风险。而传统依靠摆尾进行推进的机器鱼,虽具有良好的加速性能,但是无法进退自如,必须先完成调转鱼身朝向才能向后方运动,在面对狭窄岩缝、洞穴(尤其是弯道、障碍物间距小于自身体长尺度)时困难较大,机动性受到明显限制。
3、针对这种探测需求,我们关注到一种叫线翎电鳗的物种。这一物种主要分布在在南美亚马逊水系的淡水水域,生来就需要面对水草茂盛、水流复杂、地形复杂的水环境,在漫长的进化历程中,形成了mpf运动模态,即依靠身体下方臀鳍发生行波进行驱动,调整鱼身姿态进行转向的运动模态。依靠此运动模式,体态细长的它可以自如的前进后退,灵活地调整姿态、方向,从容地穿梭在错综的水草、复杂的地形之间。其自身的臀鳍运动还可以支持在乱流里的悬停动作。而这一物种本身的身体结构,又足以支持bcf运动模态,即通过波动或摆动部分身体和尾鳍的方式,将水向身后推射从而利用水的反作用力实现鱼体的向前运动。受到这一物种的启发,本实用新型设计了一种多运动模态的仿生机器鱼。
技术实现思路
1、有鉴于此,本实用新型的目的在于提出一种基于线翎电鳗的多运动模态仿生机器鱼,能够实现bcf和mpf两种运动模态并存。
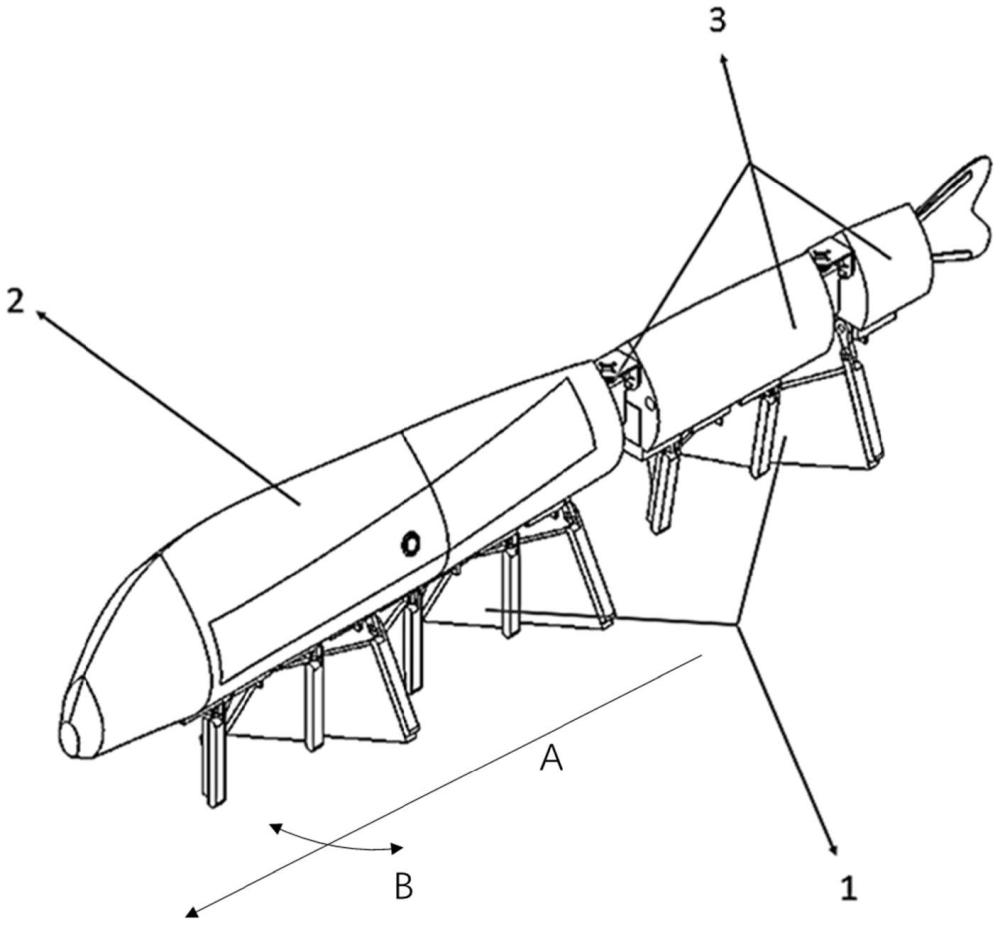
2、根据本实用新型的一个方面,提供一种基于线翎电鳗的多运动模态仿生机器鱼,该仿生机器鱼以线翎电鳗为原型进行仿生,包括:通过舵机活动连接的仿生机器鱼中央控制装置以及仿生机器鱼尾部推进装置;该仿生机器鱼中央控制装置用于接收远程控制信号控制仿生机器鱼的活动形态;
3、还包括设置于仿生机器鱼中央控制装置以及仿生机器鱼尾部推进装置下部的仿生机器鱼下部臀鳍推进装置;
4、该仿生机器鱼下部臀鳍推进装置包括若干沿一第一方向间隔设置的臀鳍棍以及沿一第一方向粘附于臀鳍棍的片状臀鳍;该臀鳍为硅胶物,且其密度:1-10g/cm^3拉伸强度:100-500磅/平方英寸。
5、该若干臀鳍棍分别通过若干第一舵机驱动装置连接于仿生机器鱼中央控制装置以及仿生机器鱼尾部推进装置下部,且通过舵机驱动若干臀鳍棍沿一第二方向进行往复转动。
6、在上述技术方案中,在目前的水下探测中,一般会采用rov机器人作为无人探测手段。传统的rov一般形状方正、体积较大,不便于通过曲折狭窄的通道。同时,rov通常使用的螺旋桨作为主要推进方式,其桨叶易卷入水下茂盛的水草,使其在水草蔓延的水域执行任务时面临较大的风险。而传统依靠摆尾进行推进的机器鱼,虽具有良好的加速性能,但是无法进退自如,必须先完成调转鱼身的朝向才能向后方运动,在面对狭窄、曲折的水下洞穴地形时,机动性受到明显限制。
7、南美亚马逊水系中的线翎电鳗,因在进化历程中长期面对水草茂盛、水流复杂、地形复杂的水环境,形成了一种独特mpf的运动模态,即依靠身体下方中心位臀鳍发生行波推进自身的运动方式,这种模态运动时身体稳定、可以自如前进后退、转向性能优越。这种物种身体结构又足以支持bcf运动模态,即利用身体和尾鳍的摆动进行运动的方式,这种模态以高巡航速度、出色加速性能、小幅度调整朝向灵敏著称。本项目基于线翎电鳗与对mpf、bcf两种运动模态的深入认识,设计了一种多运动模态的高机动性仿生机器鱼。在本案中利用仿生机器鱼尾部推进装置模仿线翎电鳗的尾部动作实现bcf运动模态;仿生机器鱼下部臀鳍推进装置通过舵机驱动若干臀鳍棍沿一第二方向以预设时间差启动旋转,使若干臀鳍棍产生相位差,并带动臀鳍形成行波,进而模仿线翎电鳗的臀鳍动作实现mpf运动模态。
8、在一些实施例中,所述第一舵机驱动装置包括180°舵机以及舵机臂;
9、所述臀鳍棍通过舵机臂连接于第一舵机驱动装置。
10、在上述技术方案中,该舵机为180°舵机,能够使得与之相连的舵机臂与臀鳍棍在0°到180°的范围内旋转,通过程序控制舵机阵列以一定时间差启动旋转产生相位差,进而以此发生波形。
11、在一些实施例中,所述仿生机器鱼尾部推进装置包括依次连接的尾部第一节、尾部第二节和尾鳍;尾部第一节一端通过第二舵机驱动装置与仿生机器鱼中央控制装置连接,另一端通过第三舵机驱动装置与尾部第二节连接。
12、在上述技术方案中,尾部第一节,尾部第二节,与前部鱼身组成双关节结构,用于实现mpf模态的转向、bcf模态的前进与转向功能;尾鳍固定于尾部第二节,用于bcf模态下的推进功能;舵机为180°舵机,能够使得与之相连的尾部在0°到180°的范围内旋转,通过舵机与舵机的配合能实现调整鱼身姿态,尾部摆动下前进、左转、右转以及更多复杂的功能。
13、在一些实施例中,所述臀鳍包括第一臀鳍和第二臀鳍;
14、该第一臀鳍粘附于仿生机器鱼中央控制装置下部的若干臀鳍棍;
15、该第二臀鳍粘附于仿生机器鱼尾部推进装置下部的若干臀鳍棍。
16、在上述技术方案中,臀鳍分为两段。两段臀鳍连接在一起是可以的,但是考虑到在转向及bcf模态游动时第二节摆角会较大从而对臀鳍造成较大拉伸,为整体结构的耐用性和游动姿态灵活性考虑将其分为两段。
17、在一些实施例中,所述臀鳍为硅胶物,且其密度:1-10g/cm^3拉伸强度:100-500磅/平方英寸。
18、在上述技术方案中,为了使得臀鳍部分的仿生效果最佳,优选值为密度:1.07g/cm^3拉伸强度:200磅/平方英寸。
19、在一些实施例中,所述臀鳍棍为树脂材料,且其密度1-10g/cm^3,弹性模量2000~4000mpa。
20、在上述技术方案中,为了使得臀鳍棍部分的仿生效果最佳,优选值为密度1.3g/cm^3,弹性模量2370~2650mpa。
21、在一些实施例中,所述仿生机器鱼中央控制装置包括:
22、仿生机器鱼控制器,用于控制仿生机器鱼尾部推进装置以及仿生机器鱼的仿生机器鱼下部臀鳍推进装置;
23、仿生机器鱼中央控制舱,用于容纳仿生机器鱼控制器以及设置外部接口
24、电源模块,用于为仿生机器鱼尾部推进装置以及仿生机器鱼的仿生机器鱼下部臀鳍推进装置以及仿生机器鱼控制器提供电力支持;
25、通讯模块,用于远程接收仿生机器鱼控制指令。
26、在上述技术方案中,将仿生鱼的主控、电源、通讯集中在一个位置,便于接线管理。
27、根据本实用新型的另一个方面,提出一种仿生机器鱼的mpf运动模态控制方法,基于上述的一种基于线翎电鳗的多运动模态仿生机器鱼,包括:
28、通过舵机驱动若干臀鳍棍沿一第二方向以预设时间差启动旋转,使若干臀鳍棍产生相位差,并带动臀鳍形成行波。
29、在上述技术方案中,南美亚马逊水系中的线翎电鳗,因在进化历程中长期面对水草茂盛、水流复杂、地形复杂的水环境,形成了一种独特mpf的运动模态,即依靠身体下方中心位臀鳍发生行波推进自身的运动方式,这种模态运动时身体稳定、可以自如前进后退、转向性能优越。这种物种身体结构又足以支持bcf运动模态,即利用身体和尾鳍的摆动进行运动的方式,这种模态以高巡航速度、出色加速性能、小幅度调整朝向灵敏著称。本项目基于线翎电鳗与对mpf、bcf两种运动模态的深入认识,设计了一种多运动模态的高机动性仿生机器鱼。在本案中利用仿生机器鱼尾部推进装置模仿线翎电鳗的尾部动作实现bcf运动模态;仿生机器鱼下部臀鳍推进装置通过舵机驱动若干臀鳍棍沿一第二方向以预设时间差启动旋转,使若干臀鳍棍产生相位差,并带动臀鳍形成行波,进而模仿线翎电鳗的臀鳍动作实现mpf运动模态。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225280.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表