一种海底电缆检测用自主巡线机器人
- 国知局
- 2024-08-01 06:54:27
本发明涉及机器人,更具体地说,它涉及一种海底电缆检测用自主巡线机器人。
背景技术:
1、海底电缆主要应用于岛屿供电、跨海域电网连接、海上风电场、海上石油平台以及跨越江河输电等领域,具有安全稳定、架设速度快的优点。由于海底电缆自身结构复杂、运行环境恶劣,导致易发生缆体损坏甚至断裂等严重故障。海缆故障主要由两类原因导致:一是海缆自身原因引起的击穿等电气故障;二是由于上行船只违规抛锚及捕鱼作业等外力引起的物理破坏。
2、现阶段能够对海底电缆本体及其周围环境状况、保护状况进行巡检的唯一手段是通过水下机器人来实现。通常,水下机器人可分为自主水下机器人(auv)和有缆遥控水下机器人(rov).auv自带能源自主航行,可执行大范围探测任务,但作业时间、数据实时性、作业能力有限。rov依靠脐带电缆提供动力,水下作业时间长、数据实时,作业能力较强,但作业范围有限;近年来发展的混合式水下机器人(arv)结合了auv和rov的优点,但造价较为昂贵,使用成本高。
3、经检索,授权公告号cn110626480b公开的一种水下巡检机器人,包括设置于水下电缆上端的壳体,壳体下端形成一半球形结构的弧形槽,壳体通过所述的弧形槽设于水下电缆的外部,弧形槽内部设有一弧形结构的用于对水下电缆进行修补的密封件,密封件的外部粘连固定一相匹配的金属片,金属片的上端安装一加热设备,壳体的前方安装一用于除去水下电缆上脏物的清洁机构,壳体的前方安装一个以上用于检测水下电缆情况的摄像头。本发明结构简单,能直接的将水下电缆上的杂物取出,使得电缆的外壁能清晰的显露在摄像头下,方便了对电缆的外部进行检测,同时能直接的对损坏处进行直接的修补,大大的增加了效率。
4、但是,上述设计还存在不足之处,上述设计壳体沿着水下电缆向前移动,前进的过程中启动振动泵,振动泵产生的振动传递到刮板上,通过振动的刮板除去电缆外壁的杂质,使电缆的外壁面清晰的暴露在摄像头下,然而通过刮板去除的杂质会迅速的扩散到四周的水中,形成一道天然的“屏障”对摄像头的拍摄造成遮挡,由于摄像头被遮挡,拍摄到的电缆外壁图像可能会变得模糊不清,进而影响检测的精度和准确性。
技术实现思路
1、本发明提供一种海底电缆检测用自主巡线机器人,解决相关技术中壳体沿着水下电缆向前移动,前进的过程中启动振动泵,振动泵产生的振动传递到刮板上,通过振动的刮板除去电缆外壁的杂质,使电缆的外壁面清晰的暴露在摄像头下,然而通过刮板去除的杂质会迅速的扩散到四周的水中,形成一道天然的“屏障”对摄像头的拍摄造成遮挡,由于摄像头被遮挡,拍摄到的电缆外壁图像可能会变得模糊不清,进而影响检测的精度和准确性的技术问题。
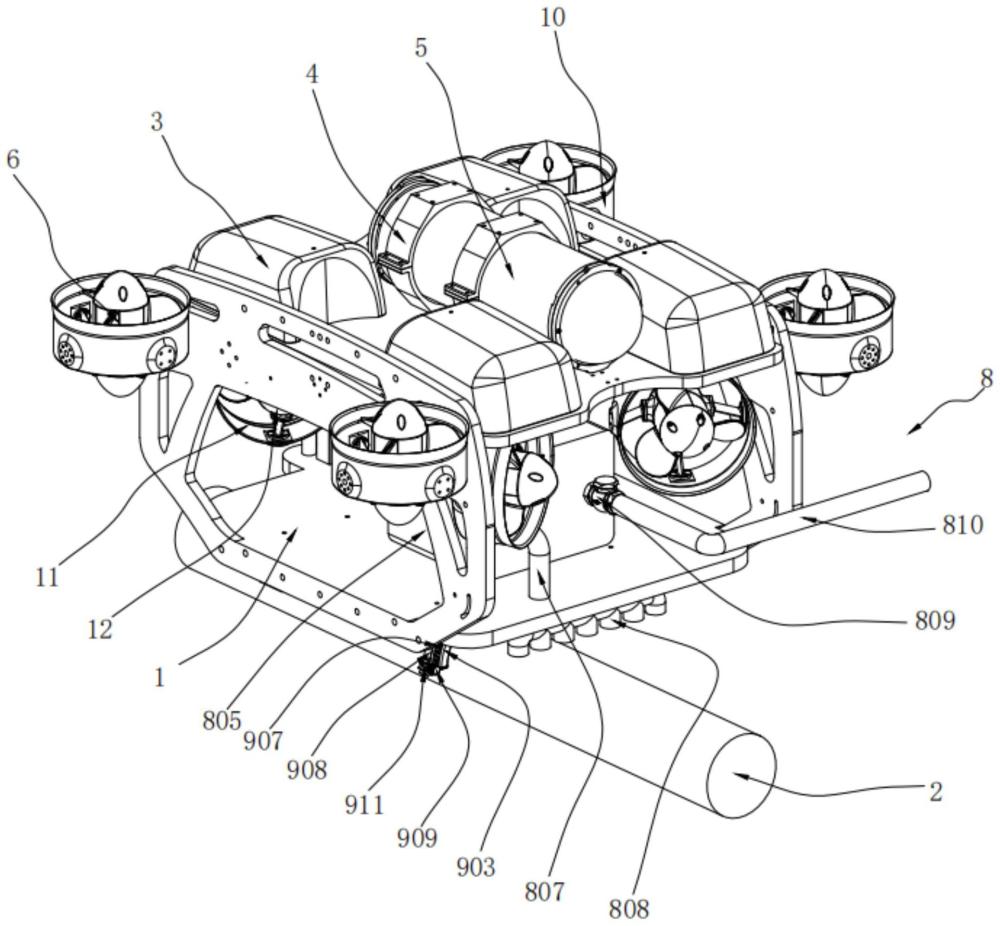
2、根据本发明的一个方面,提供了一种海底电缆检测用自主巡线机器人,包括:安装架和电缆,所述电缆位于安装架的下方,所述安装架,所述安装架的顶部固定安装有四个电池仓,所述安装架的顶部固定安装有两个安装套,两个安装套内固定安装有同一个云台摄像机,云台摄像机用于拍摄海底电缆的图像,并通过图像处理技术进行分析和识别电缆的损伤或故障,所述安装架的底部内壁上设置有第一辅助拍摄机构和第二辅助拍摄机构,所述安装架的底部设置有套环机构。
3、进一步地:所述安装架的左右两侧内壁上均固定安装有两个第一固定套筒,所述第一固定套筒的内壁上固定设置有水平螺旋推进器,水平螺旋推进器用于驱动机器人进行水平方向移动,所述水平螺旋推进器呈对称设置,所述安装架的左右两侧均固定安装有第二固定套筒,所述第二固定套筒的内壁上固定安装有垂直螺旋推进器,垂直螺旋推进器用于驱动机器人进行垂直方向移动。
4、进一步地:所述第一辅助拍摄机构包括弹簧,所述弹簧固定安装在安装架的底部,所述弹簧的底端固定安装有安装板,所述安装板的底部固定安装有震动板,所述震动板的底部与电缆相抵接,所述安装板的顶部固定安装有l形杆,所述l形杆的顶端贯穿安装架的底部内壁,并延伸至其上方。
5、进一步地:所述安装架的底部内壁上固定安装有第一固定板,所述第一固定板的后侧转动安装有第一转动轴,所述第一转动轴的外侧固定安装有三根楔形杆,三根楔形杆以第一转动轴的圆心为中心呈阵列设置,所述楔形杆与l形杆配合使用,所述安装架的底部内壁上固定安装有第二固定板,所述第二固定板的后侧固定安装有电机座,所述电机座的顶部固定安装有驱动电机。
6、进一步地:所述驱动电机的输出轴前端贯穿第二固定板,并延伸至其前侧,所述驱动电机的输出轴外侧固定套设有驱动带轮,所述第一转动轴的外侧固定套设有从动带轮,所述驱动带轮与从动带轮上传动连接有同一根皮带。
7、进一步地:所述第二辅助拍摄机构包括第一连杆,所述第一连杆固定安装在驱动电机的输出轴前端,所述第一连杆的前侧固定安装有固定轴,所述固定轴的前侧固定安装有第二连杆,所述第二连杆的前侧转动安装有滑杆。
8、进一步地:所述安装架的底部内壁上固定安装有转移箱,所述滑杆前端贯穿转移箱的后侧内壁,并延伸至其内部,所述滑杆的前端固定安装有密封滑板,所述密封滑板与转移箱的内壁滑动连接,且密封滑板与转移箱之间密封连接。
9、进一步地:所述转移箱的前侧固定安装有第一单向阀,所述第一单向阀的前侧固定安装有抽污管,所述抽污管的底端贯穿安装架的底部内壁,并延伸至其下方,所述抽污管的底端固定安装有分流管,所述转移箱的前侧固定安装有第二单向阀,所述第二单向阀的前侧固定安装有排污管,所述排污管呈l形状。
10、进一步地:所述套环机构包括固定杆,所述固定杆固定安装在安装架的底部,所述固定杆的底部固定安装有u形板,所述u形板的内壁上固定安装有半圆套,所述半圆套的前后两侧内壁上均开设有滑槽,所述滑槽内滑动连接有滑块,两个滑块之间固定安装有同一个半圆环,所述半圆环的外侧开设有多个呈间隔均匀设置的从动齿牙。
11、进一步地:所述u形板的顶部固定安装有弧形板,所述弧形板的前侧固定安装有套环电机,所述弧形板上开设有通槽,所述套环电机的输出轴延伸至通槽内,所述套环电机的输出轴外侧固定套设有驱动齿轮,所述驱动齿轮与从动齿牙相啮合。
12、本发明的有益效果在于:
13、在对电缆检测时,先通过第一辅助拍摄机构驱动震动板清洁电缆表面的泥沙,然后通过第二辅助拍摄机构将携带着震动板震落的泥沙的浑浊水抽走,避免浑浊水中的泥沙遮挡导致云台摄像机拍摄到的电缆外壁图像模糊不清的问题,以保证云台摄像机能够拍摄到清晰的电缆表面图形,进而能够大幅提高机器人的巡检检测准确度。
技术特征:1.一种海底电缆检测用自主巡线机器人,其特征在于,包括:安装架(1)和电缆(2),所述电缆(2)位于安装架(1)的下方,所述安装架(1),所述安装架(1)的顶部固定安装有四个电池仓(3),所述安装架(1)的顶部固定安装有两个安装套(4),两个安装套(4)内固定安装有同一个云台摄像机(5),云台摄像机(5)用于拍摄海底电缆的图像,并通过图像处理技术进行分析和识别电缆的损伤或故障,所述安装架(1)的底部内壁上设置有第一辅助拍摄机构(7)和第二辅助拍摄机构(8),所述安装架(1)的底部设置有套环机构(9)。
2.根据权利要求1所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述安装架(1)的左右两侧内壁上均固定安装有两个第一固定套筒(10),所述第一固定套筒(10)的内壁上固定设置有水平螺旋推进器(11),水平螺旋推进器(11)用于驱动机器人进行水平方向移动,所述水平螺旋推进器(11)呈对称设置,所述安装架(1)的左右两侧均固定安装有第二固定套筒(12),所述第二固定套筒(12)的内壁上固定安装有垂直螺旋推进器(6),垂直螺旋推进器(6)用于驱动机器人进行垂直方向移动。
3.根据权利要求1所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述第一辅助拍摄机构(7)包括弹簧(701),所述弹簧(701)固定安装在安装架(1)的底部,所述弹簧(701)的底端固定安装有安装板(702),所述安装板(702)的底部固定安装有震动板(703),所述震动板(703)的底部与电缆(2)相抵接,所述安装板(702)的顶部固定安装有l形杆(704),所述l形杆(704)的顶端贯穿安装架(1)的底部内壁,并延伸至其上方。
4.根据权利要求3所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述安装架(1)的底部内壁上固定安装有第一固定板(705),所述第一固定板(705)的后侧转动安装有第一转动轴(706),所述第一转动轴(706)的外侧固定安装有三根楔形杆(707),三根楔形杆(707)以第一转动轴(706)的圆心为中心呈阵列设置,所述楔形杆(707)与l形杆(704)配合使用,所述安装架(1)的底部内壁上固定安装有第二固定板(708),所述第二固定板(708)的后侧固定安装有电机座(709),所述电机座(709)的顶部固定安装有驱动电机(710)。
5.根据权利要求4所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述驱动电机(710)的输出轴前端贯穿第二固定板(708),并延伸至其前侧,所述驱动电机(710)的输出轴外侧固定套设有驱动带轮(711),所述第一转动轴(706)的外侧固定套设有从动带轮(712),所述驱动带轮(711)与从动带轮(712)上传动连接有同一根皮带(713)。
6.根据权利要求5所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述第二辅助拍摄机构(8)包括第一连杆(801),所述第一连杆(801)固定安装在驱动电机(710)的输出轴前端,所述第一连杆(801)的前侧固定安装有固定轴(802),所述固定轴(802)的前侧固定安装有第二连杆(803),所述第二连杆(803)的前侧转动安装有滑杆(804)。
7.根据权利要求6所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述安装架(1)的底部内壁上固定安装有转移箱(805),所述滑杆(804)前端贯穿转移箱(805)的后侧内壁,并延伸至其内部,所述滑杆(804)的前端固定安装有密封滑板(811),所述密封滑板(811)与转移箱(805)的内壁滑动连接,且密封滑板(811)与转移箱(805)之间密封连接。
8.根据权利要求7所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述转移箱(805)的前侧固定安装有第一单向阀(806),所述第一单向阀(806)的前侧固定安装有抽污管(807),所述抽污管(807)的底端贯穿安装架(1)的底部内壁,并延伸至其下方,所述抽污管(807)的底端固定安装有分流管(808),所述转移箱(805)的前侧固定安装有第二单向阀(809),所述第二单向阀(809)的前侧固定安装有排污管(810),所述排污管(810)呈l形状。
9.根据权利要求1所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述套环机构(9)包括固定杆(901),所述固定杆(901)固定安装在安装架(1)的底部,所述固定杆(901)的底部固定安装有u形板(902),所述u形板(902)的内壁上固定安装有半圆套(903),所述半圆套(903)的前后两侧内壁上均开设有滑槽(904),所述滑槽(904)内滑动连接有滑块(905),两个滑块(905)之间固定安装有同一个半圆环(906),所述半圆环(906)的外侧开设有多个呈间隔均匀设置的从动齿牙(907)。
10.根据权利要求9所述的一种海底电缆检测用自主巡线机器人,其特征在于,所述u形板(902)的顶部固定安装有弧形板(908),所述弧形板(908)的前侧固定安装有套环电机(909),18505所述弧形板(908)上开设有通槽(910),所述套环电机(909)的输出轴延伸至通槽(910)内,所述套环电机(909)的输出轴外侧固定套设有驱动齿轮(911),所述驱动齿轮(911)与从动齿牙(907)相啮合。
技术总结本发明涉及机器人技术领域,具体公开了一种海底电缆检测用自主巡线机器人,包括:安装架和电缆,所述电缆位于安装架的下方,所述安装架,所述安装架的顶部固定安装有四个电池仓,所述安装架的顶部固定安装有两个安装套,两个安装套内固定安装有同一个云台摄像机,云台摄像机用于拍摄海底电缆的图像,在对电缆检测时,先通过第一辅助拍摄机构驱动震动板清洁电缆表面的泥沙,然后通过第二辅助拍摄机构将携带着震动板震落的泥沙的浑浊水抽走,避免浑浊水中的泥沙遮挡的影响云台摄像机的拍摄效果,以保证云台摄像机能够拍摄到清晰的电缆表面图形,进而能够大幅提高机器人的巡检检测准确度。技术研发人员:曹爱萍受保护的技术使用者:威海海洋职业学院技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240722/225428.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表