一种智能化船用救生系统
- 国知局
- 2024-08-01 06:55:02
本发明属于海上救援,具体涉及一种智能化船用救生系统。
背景技术:
1、近年来,我国海上救援事业持续发展,同时仍然存在诸多问题,且由于海上救援的突发性以及救援信息传输效率本身的限制,民众的生命和财产在紧急情况下还是需要通过自救来维护;同时,由于救援知识传播的局限性,民众并未完全掌握相关救生产品(如手电筒、绳索、救生漂浮物等)的使用技巧,更未经过系统化的救援演习,在逃生时由于准备物资不充分、时间紧迫等因素会导致极易被困、被淹;另一方面,民众对于基础的救生设备并不熟悉,对先进救援设备更加陌生,这就进一步的增加了救援的难度。
2、综合而言,我国对海上救援给予了极大的关注度,但海上救援系统框架和应急产品的设计仍处于不断探索完善的阶段,目前,海上救援设备较多,但是存在以下缺点:
3、(1)事故预警机制弱:主要体现在缺乏有效监测与通信系统上,其中,海上监测和通信系统覆盖范围有限,往往无法实时获得事故信息,以致于人员落水却无人知晓的情况时有发生,同时,知道了有人员落水却不清楚具体落水位置也是阻碍救援的一大难题,且海上救生装备的预警机制需要依赖搜索与救援资源的调动和响应;然而,这些资源通常是有限的,尤其是在远离陆地、远离人口密集区的海域,这就导致了救援队伍的反应速度较慢,影响了预警的效果。
4、(2)救援效率低:一些救生装备的设计过于复杂,而且需要花费较长的时间来穿戴。在紧急情况下,这会浪费宝贵的时间,从而影响救援的效率;比如最先进的智能救生圈,其仍需要人为操控,且一次只能救援一名落水人员。
5、基于前述不足,如何提供一种能够实现自动实时监测、救援效率高,且集智能化救援和生存保障为一体的船用救生系统,已成为一个亟待解决的问题。
技术实现思路
1、本发明的目的是提供一种智能化船用救生系统,用以解决现有技术中所存在的事故预警机制弱以及救援效率低的问题。
2、为了实现上述目的,本发明采用以下技术方案:
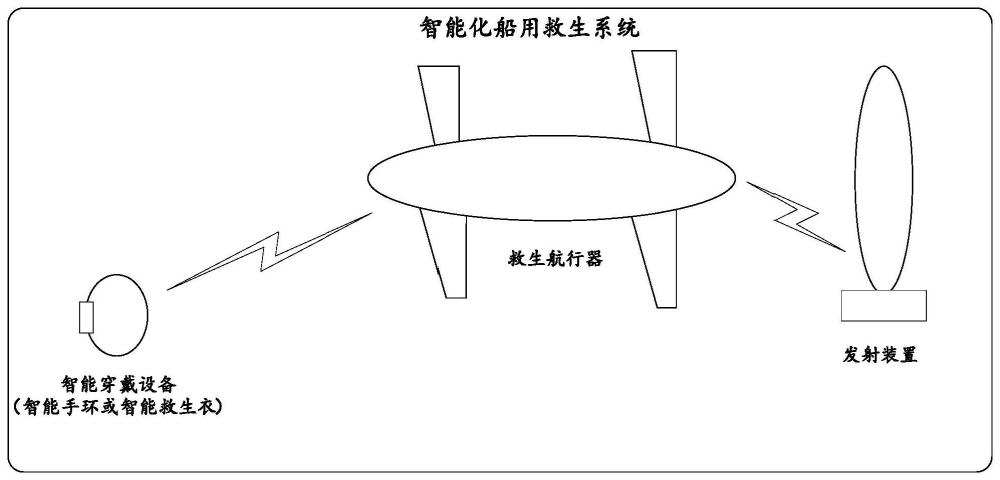
3、第一方面,提供了一种智能化船用救生系统,包括:
4、智能穿戴设备,所述智能穿戴设备穿戴于目标人员上,其中,所述智能穿戴设备包括落水传感器以及信号发射器,且所述落水传感器电连接所述信号发射器,用于在检测到所述目标人员落水后,激活所述信号发射器,以使所述信号发射器向外部发射电磁波信号;
5、救生航行器,所述救生航行器上设置有有源相控阵雷达收发装置以及救生机械臂,其中,所述有源相控阵雷达收发装置包括相控阵雷达收发模块以及处理终端,所述相控阵雷达收发模块用于接收所述信号发射器发射的电磁波信号,并将所述电磁波信号发送至所述处理终端,以使所述处理终端在接收到所述电磁波信号后,基于所述电磁波信号确定出所述目标人员的落水位置,以及向发射装置发送发射指令;
6、发射装置,其中,所述救生航行器设置于所述发射装置内,且所述发射装置用于在接收到所述发射指令后,将所述救生航行器弹射至水面;
7、所述处理终端,还用于控制所述救生航行器向所述落水位置处运动,并在到达所述落水位置处时,控制所述救生机械臂拾起所述目标人员。
8、基于上述公开的内容,本发明所提供的船用救生系统,设置有智能穿戴设备、救生航行器以及发射装置,其中,智能穿戴设备穿戴于人员上,用于实时检测人员是否落水,并在检测到人员落水时,发出电磁波信号;而救生航行器上设置有有源相控阵雷达收发装置,其用于接收智能穿戴设备发射的电磁波信号,并借助对应的处理终端来完成人员的定位,得到落水位置;同时,处理终端还会向发射装置发送发射指令,使发射装置将救生航行器发射至水面上;而后,处理终端则可控制救生航行器向人员落水位置处移动,并在到达落水位置处时,通过航行器上的救生机械臂来救援落水人员。
9、通过上述设计,本发明以先进信息技术为依托,通过信息系统的精确定位,发射系统的快速反应,航行器的快速捕捉,来第一时间发现并定位落水者;而后,发射航行器对落水者实施救援;如此,本发明通过先进的人工智能技术实现了个人穿戴设备与中央主机的协同,能精确判断船员是否落水,并利用船员上的穿戴设备来实现船员位置的动态定位,从而控制航行器第一时间进行救援;由此,通过自动定位和自动弹射装置可以大幅缩短救援的响应时间,快速将航行器投放到遇险人员附近,从而有效减少遇险人员等待救援的时间;同时,通过精确定位落水人员和控制航行器到落水位置,可以确保救生航行器更接近遇险人员,从而降低救援的难度和风险,提高救援成功的概率;基于此,本发明非常适用于在海上救援领域的应用与推广。
10、在一个可能的设计中,所述信号发射器包括:波形发生模块、d/a转换模块、放大模块、信号输出模块以及控制器,其中,所述波形发生模块电连接所述控制器的输入端,用于向所述控制器发送初始信号,且所述控制器的输出端电连接d/a转换模块,用于将所述初始信号发送至d/a转换模块中进行数模转换,得到模拟信号;
11、所述d/a转换模块的输出端电连接所述放大模块的输入端,用于通过所述放大模块对所述模拟信号进行信号放大处理,得到电磁波信号,并通过所述信号输出模块发射所述电磁波信号。
12、在一个可能的设计中,所述相控阵雷达收发模块包括:天线阵列以及t/r组件,其中,所述天线阵列电连接所述t/r组件,用于将接收到的电磁波信号发送至所述t/r组件;
13、所述t/r组件电连接所述处理终端,用于对所述电磁波信号进行信号处理,得到处理后的信号,并将处理后的信号发送至所述处理终端,以使所述处理终端基于处理后的信号,确定出所述目标人员的落水位置,其中,信号处理包括信号放大处理、信号滤波处理和信号转换处理。
14、在一个可能的设计中,所述天线阵列包括若干天线单元,其中,若干天线单元中的每个天线单元分别对应连接一t/r组件,且若干天线单元中的任一天线单元从上至下依次设置有五层介质基板;
15、五层介质基板中的第二层至第四层介质基板上设置有开腔,且每个开腔的内部设置有金属层,以形成侧壁金属化波导;
16、第五层介质基板上设置有第一输入/输出波导,其中,所述第一输入/输出波导电连接所述t/r组件,且所述第五层介质基板上设置金属化过孔;
17、第一层介质基板上设置有第二输入/输出波导,且所述第二输入/输出波导的开口边缘处设置有金属贴片。
18、在一个可能的设计中,所述t/r组件包括锁定相位型放大电路、带通滤波电路、a/d与d/a转换电路、限幅器以及移相器;
19、其中,所述锁定相位型放大电路的输入端通过所述移相器电连接所述天线阵列,所述锁定相位型放大电路的输出端通过所述限幅器电连接所述带通滤波电路的输入端,所述带通滤波电路的输出端通过所述a/d与d/a转换电路电连接所述处理终端。
20、在一个可能的设计中,所述锁定相位型放大电路包括:第一运算放大器、第二运算放大器以及第三运算放大器;
21、所述第一运算放大器的反相输入端通过第一电阻电连接所述第二运算放大器的反相输入端,所述第一运算放大器的正相输入端和所述第二运算放大器的正相输入端作为所述锁定相位型放大电路的输入端,通过所述移相器电连接所述天线阵列;
22、所述第一运算放大器的输出端通过第二电阻电连接所述第三运算放大器的反相输入端,所述第二运算放大器的输出端通过第三电阻电连接所述第三运算放大器的正相输入端,其中,所述第三运算放大器的输出端通过限幅器电连接所述带通滤波电路,且所述第一运算放大器、所述第二运算放大器以及所述第三运算放大器的反相输入端与输出端之间均并联有第四电阻。
23、在一个可能的设计中,所述救生航行器包括航行器主体,其中,所述航行器主体采用回转体外形,且所述有源相控阵雷达收发装置以及所述救生机械臂设置在所述航行器主体上;
24、所述航行器主体的两侧分别设置有水平翼,所述航行器主体的尾部设置有垂直翼以及推进器,其中,所述水平翼和所述垂直翼分别连接有传动机构,且所述处理终端电连接所述传动机构以及所述推进器的受控端。
25、在一个可能的设计中,所述航行器主体包括:头部、尾部和平行中体,其中,所述头部、尾部和平行中体之间采用密封连接方式进行连接,且所述头部和尾部的外形曲线采用myr ing型外形曲线;
26、所述救生机械臂设置在所述航行器主体的头部上,且所述救生机械臂采用蛇形机械臂;
27、所述平行中体内设置有若干充气救生圈以及救生物品;
28、所述航行器主体的尾部设置有所述推进器,其中,所述推进器包括水密电机和导管螺旋桨,且所述水密电机与所述导管螺旋桨轴向连接。
29、在一个可能的设计中,所述救生航行器的底部还设置有充气筏,其中,所述救生航行器的两侧分别设置有若干高压气瓶,且各个高压气瓶的出气口连通所述充气筏。
30、在一个可能的设计中,所述发射装置包括:转盘、支架、发射筒和高压室,其中,所述转盘固定在安装载体上,所述支架固定于所述转盘上,且所述发射筒安装于所述支架上;
31、所述发射筒内设置有低压室以及控制板,其中,所述高压室通过电磁阀连通所述低压室,所述高压室内设置有高压气体,且所述处理终端电连接所述控制板,所述控制板电连接电磁阀;
32、所述低压室内设置有推动板,且所述救生航行器设置于所述低压室内。
33、有益效果:
34、(1)本发明以先进信息技术为依托,通过信息系统的精确定位,发射系统的快速反应,航行器的快速捕捉,来第一时间发现并定位落水者;而后,发射航行器对落水者实施救援;如此,本发明通过先进的人工智能技术实现了个人穿戴设备与中央主机的协同,能精确判断船员是否落水,并利用船员上的穿戴设备来实现船员位置的动态定位,从而控制航行器第一时间进行救援;由此,通过自动定位和自动弹射装置可以大幅缩短救援的响应时间,快速将航行器投放到遇险人员附近,从而有效减少遇险人员等待救援的时间;同时,通过精确定位落水人员和控制航行器到落水位置,可以确保救生航行器更接近遇险人员,从而降低救援的难度和风险,提高救援成功的概率;基于此,本发明非常适用于在海上救援领域的应用与推广。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225471.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。