一种携带机械手的自主式水下航行器
- 国知局
- 2024-08-01 06:54:56
本发明属于水下航行器,具体涉及一种携带机械手的自主式水下航行器。
背景技术:
1、随着海洋事业的发展,水下作业的种类越来越多,例如:对海洋环境的监测和清污作业、海上油气田生产设施中海底管线的检测和修护作业、海上风电的工程施工与运行维护作业、船舶侧翻落入水中物体的寻找作业,以及对海洋生物标本、海底矿产资源标本、海底泥土标本等各种各样的标本的采集作业等。以上各种各样的水下作业都离不开水下航行器这一主要的作业工具。
2、目前应用广泛的水下航行器包括rov和auv。
3、rov为无人有缆潜水器,由于其可携带作业工具,因此应用于的水下作业种类繁多,包括海底导管架的安装和检测,海管的铺设、维修和检测,采油树和球阀等的开关,海上风电水下检测与施工等。但rov通过脐带缆与水面支持母船连接,只能进行水下定点作业,无法进行大范围探查。
4、auv为自主式水下航行器,是指在无人操作的情况下,能在水下自主完成任务的航行器,其摆脱了缆绳的羁绊,操作更加灵活,自带能源,自主控制,在执行耗时的监测任务、探测任务以及在浅水和冰层下的环境中应用广泛。但现有的auv上不携带机械手作业工具,从而导致其水下作业能力受限。
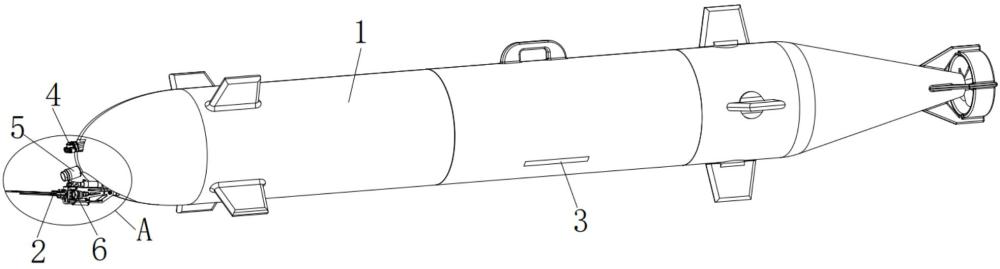
5、基于以上问题,本发明提供了一种携带机械手的自主式水下航行器,在auv本体的艏部设置机械手,既解决了rov只能进行水下定点作业的问题,又解决了传统auv因不携带机械手作业工具而导致的水下作业种类受限的问题。
技术实现思路
1、本发明的目的是为克服上述现有技术的不足,提供一种携带机械手的自主式水下航行器。
2、为实现上述目的,本发明采用如下技术方案:
3、一种携带机械手的自主式水下航行器,包括auv本体;
4、所述auv本体的艏部设置机械手,所述机械手包括固定设置在auv本体艏部内侧的艏部出沿,所述艏部出沿面向auv本体艏部的一侧固定设置底座,所述底座上设置有机械手固定底座,所述机械手固定底座的端部穿出auv本体的艏部;
5、所述机械手固定底座的端部设置有两个相对称的夹爪,所述机械手固定底座上设置有能够控制两个夹爪相向运动实现机械手闭合或者控制两个夹爪背向运动实现机械手张开的张合驱动组件。
6、优选的,所述张合驱动组件包括固定设置在机械手固定底座上的张合液压缸,所述张合液压缸的活塞杆端部设置齿条组件,所述齿条组件的两侧均设置齿条;
7、所述齿条组件与夹爪连接块进行滑动配合,所述夹爪连接块面向艏部出沿的一端与机械手固定底座相连;
8、所述夹爪靠近机械手固定底座的一端设置有与相应齿条相配合的张合齿轮,所述张合齿轮与夹爪连接块进行转动配合。
9、优选的,所述张合液压缸的活塞杆端部与延长轴的一端同轴固定连接,所述延长轴的另一端与齿条组件相连。
10、优选的,所述auv本体上设置有侧扫声呐;
11、所述艏部出沿面向机械手固定底座的一侧设置前视声呐,所述前视声呐穿出auv本体的艏部;
12、所述机械手固定底座上设置摄像头,所述摄像头位于auv本体艏部的外端;
13、所述机械手固定底座中位于auv本体艏部外端的两侧各设置有一个照明灯。
14、优选的,所述机械手固定底座上设置有能够控制两个夹爪绕张合液压缸活塞杆中心轴转动的转动驱动组件。
15、优选的,所述延长轴与齿条组件进行转动配合;
16、所述夹爪连接块面向艏部出沿的一端与机械手固定底座进行转动配合;
17、所述转动驱动组件包括固定设置在机械手固定底座上的舵机,所述舵机的输出轴端部与主齿轮进行同轴固定连接;
18、所述夹爪连接块上设置有从齿轮,所述从齿轮的中心轴与张合液压缸活塞杆的中心轴共线;
19、所述主齿轮、从齿轮进行啮合连接。
20、优选的,所述夹爪连接块面向艏部出沿的一端固定设置有与从齿轮同轴的轴套,所述轴套的内部设置有供延长轴穿过的通孔;
21、所述轴套的外壁面与机械手固定底座进行转动配合。
22、优选的,所述轴套的外壁面与机械手固定底座之间通过推力球轴承进行转动配合。
23、优选的,所述底座上设置有能够控制两个夹爪俯仰运动的俯仰驱动组件。
24、优选的,所述俯仰驱动组件包括俯仰液压缸,所述俯仰液压缸的缸壁端部与底座之间通过第一转轴相铰接,所述俯仰液压缸的活塞杆端部与机械手固定底座中远离艏部出沿的一端通过第二转轴相铰接;
25、所述机械手固定底座与底座之间通过第三转轴进行转动配合。
26、本发明的有益效果是:
27、本发明通过将机械手搭载到auv本体上,既解决了rov只能进行水下定点作业的问题,又解决了传统auv因不携带机械手作业工具而导致的水下作业种类受限的问题;本发明中机械手具有张合、俯仰、转动三个自由度,与航行器配合,能够实现水下的灵活作业。
技术特征:1.一种携带机械手的自主式水下航行器,包括auv本体;其特征在于,
2.如权利要求1所述的一种携带机械手的自主式水下航行器,其特征在于,所述张合驱动组件包括固定设置在机械手固定底座上的张合液压缸,所述张合液压缸的活塞杆端部设置齿条组件,所述齿条组件的两侧均设置齿条;
3.如权利要求2所述的一种携带机械手的自主式水下航行器,其特征在于,所述张合液压缸的活塞杆端部与延长轴的一端同轴固定连接,所述延长轴的另一端与齿条组件相连。
4.如权利要求1所述的一种携带机械手的自主式水下航行器,其特征在于,所述auv本体上设置有侧扫声呐;
5.如权利要求3所述的一种携带机械手的自主式水下航行器,其特征在于,所述机械手固定底座上设置有能够控制两个夹爪绕张合液压缸活塞杆中心轴转动的转动驱动组件。
6.如权利要求5所述的一种携带机械手的自主式水下航行器,其特征在于,所述延长轴与齿条组件进行转动配合;
7.如权利要求6所述的一种携带机械手的自主式水下航行器,其特征在于,所述夹爪连接块面向艏部出沿的一端固定设置有与从齿轮同轴的轴套,所述轴套的内部设置有供延长轴穿过的通孔;
8.如权利要求7所述的一种携带机械手的自主式水下航行器,其特征在于,所述轴套的外壁面与机械手固定底座之间通过推力球轴承进行转动配合。
9.如权利要求1所述的一种携带机械手的自主式水下航行器,其特征在于,所述底座上设置有能够控制两个夹爪俯仰运动的俯仰驱动组件。
10.如权利要求9所述的一种携带机械手的自主式水下航行器,其特征在于,所述俯仰驱动组件包括俯仰液压缸,所述俯仰液压缸的缸壁端部与底座之间通过第一转轴相铰接,所述俯仰液压缸的活塞杆端部与机械手固定底座中远离艏部出沿的一端通过第二转轴相铰接;
技术总结本发明公开了一种携带机械手的自主式水下航行器,属于水下航行器技术领域,包括AUV本体;AUV本体的艏部设置机械手,机械手包括固定设置在AUV本体艏部内侧的艏部出沿,艏部出沿面向AUV本体艏部的一侧固定设置底座,底座上设置有机械手固定底座;机械手固定底座的端部设置有两个相对称的夹爪,机械手固定底座上设置有能够控制两个夹爪相向运动实现机械手闭合或者控制两个夹爪背向运动实现机械手张开的张合驱动组件。本发明通过将机械手搭载到AUV本体上,既解决了ROV只能进行水下定点作业的问题,又解决了传统AUV因不携带机械手作业工具而导致的水下作业种类受限的问题。技术研发人员:陈云赛,逄浩震,张栋,王顺礼,姜清华,刘增凯受保护的技术使用者:青岛哈尔滨工程大学创新发展中心技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/225464.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表