一种面向海底定点取样的水下自主航行器
- 国知局
- 2024-08-01 06:54:52
本发明属于海底取样设备领域,尤其涉及一种面向海底定点取样的水下自主航行器。
背景技术:
1、由海底热液喷口所喷出的海底热液是一种高温液体,是由于海水与被岩浆加热过后的岩石相互作用而形成。热液羽流中含有大量的重金属和还原性化学物质,如硫化氢、甲烷、mn2+离子和fe2+离子等。这些重金属以硫化物、硫酸盐、碳酸盐和氧化物矿物的形式沉淀下来,形成了海底黑烟囱。据估计这些海底热液沉积物中的稀有金属可作为一种矿产资源用于工业活动。深海热液活动还孕育了独特的热液生态系统,热液中的化学反应能为热液口周围的化能自养型微生物提供生命所需的能量。从热液口微生物的新陈代谢对热液活动的依赖关系来看,研究热液的成分是了解热液区微生物生命机制的关键。
2、作为深海探测技术的一种,取样探测技术带回了海洋里宝贵的矿产、微生物、水质等样品,为探索海洋资源、推动生物学、生态学研究等提供了重要帮助。在高盐、高压且能见度差的深海环境下实现稳定取样作业是海底研究所要解决的重要问题。海底地貌特征错综复杂,热液喷口的直径在3厘米至数十厘米不等,需要取样设备实定点取样,以保证取样的成功率,否则受洋流等产生的扰动不仅会破坏地形损害设备,导致取样失败,若是依靠载人潜水器取样则还会威胁到操作人员的生命安全。
3、专利文献cn113834693a公开了一种热液喷口流体有用元素的富集装置,包括吸入龙头、吸入伸缩管汇、开关阀、输入管、输出管、排出伸缩管汇、工作舱保护外壳及分别安装于该工作舱保护外壳内部由入口向出口依次连接的重力沉淀仓、离心沉淀仓、精细过滤仓、流体仓、阳离子吸附仓、阴离子吸附仓、深水泵,吸入伸缩管汇及排出伸缩管汇分别转动安装于工作舱保护外壳的入口端和出口端,吸入伸缩管汇的入口端与吸入口朝下设置的吸入龙头连接,出口端通过输入管与重力沉淀仓相连,输出管的一端与深海泵连接,另一端连接有排出伸缩管汇,吸入伸缩管汇上安装有开关阀。该装置未能考虑海底热液口的形状及采集环境,仅通过定型的吸入伸缩管并不能很好的适用海底复杂环境。
4、专利文献cn101975682a公开了一种海底热液自动采样器,其采样器包括固定在支架上的开阀腔体、采样腔、温度测量电路腔和温度显示电路腔。本发明的采样器利用开阀腔体内的电控触发机构来控制采样阀,实现自动采样。采样器能在采样过程中测量并实时显示热液的温度,从而有助于寻找最佳的采样点。该装置所选用的采样管为预制件且固定在采样器本体上,并未考虑海底热液口朝向或热液口深度,导致其实用性不强。
技术实现思路
1、本发明的目的在于提供一种水下自主航行器,该水下自主航行器搭载有高灵活性的采样机械臂,从而应对真实复杂的海底热液口采样任务。
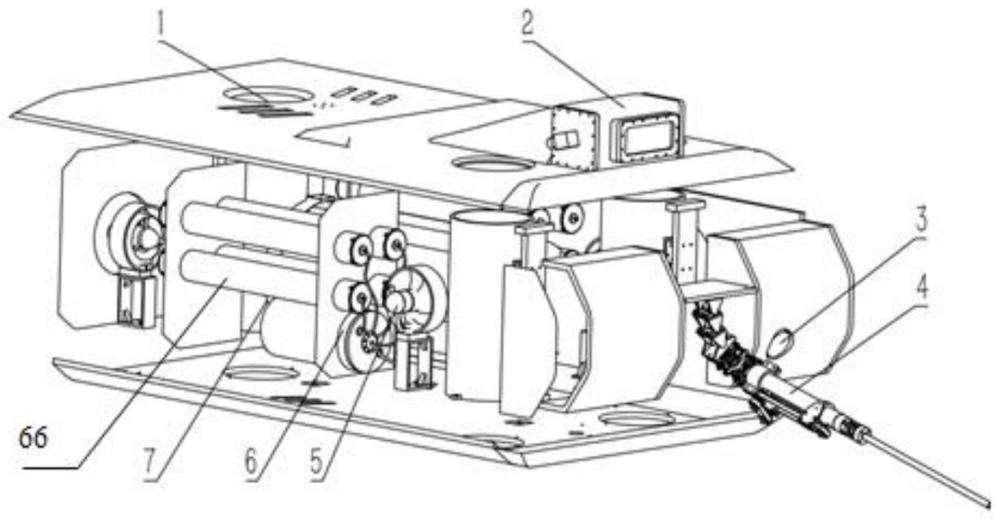
2、为了实现本发明的目的,提供了一种面向海底定点取样的水下自主航行器,包括水下机器人本体和搭载在所述水下机器人本体上的取样装置,所述取样装置包括固定在水下机器人本体上的取样臂和取样筒,以及设置在取样臂自由转动端用于提取液体样本的伸缩取样头,所述伸缩取样头与所述取样筒之间设有用于输送液体样本的软管;
3、所述取样臂包括设置在所述水下机器人本体上的支架,以及设置在所述支架上多段相连的仿生关节组件,每段仿生组件包括多个头尾依次相连的骨架单元和用于串联多个骨架单元的软绳,相邻两个骨架单元之间设有与所述软绳串联方向平行布置的复位弹簧,以及用于调节软绳拉力方向的垂直绞盘机构或水平绞盘机构,相邻两段仿生关节组件的摆动方向正交设置;
4、每个骨架单元设有贯通孔,多个骨架单元串联时通过贯通孔形成用于软管通过的关节通道。
5、本发明通过仿生关节组件与伸缩取样头,以增加水下自主航行器在海底中的采样灵活性。
6、具体的,所述伸缩取样头包括取样头,从外向内同轴布置的外管,中管和内管,以及带动内管相对与中管和外管运动的伸缩机构,所述内管设有用于软管通过的软管通道,所述取样头通过软管通道与软管连通,所述伸缩机构包括外管外侧设导轨和与导轨滑动配合的同步带夹板,以及为同步带夹板沿管轴向移动提供动力的同步带电机,所述外管和所述中管沿管轴方向均设有避让槽,所述同步带夹板通过所述避让槽与内管固连以带动内管移动,从而适用不同姿态下的取样任务。
7、具体的,所述内管的伸出端设有与中管端部平行布置的限位板,所述限位板相对中管端部的一端设有多个与中管轴向平行的限位杆,所述中管端部设有用于所述限位杆通过的避让孔。
8、具体的,所述垂直绞盘机构包括设置在支架上的垂直绞盘和垂直绞盘电机以及设置在每个骨架单元上的关节绞盘,所述软绳通过垂直绞盘后沿骨架单元串联方向依次与每个骨架单元上的关节绞盘缠绕设置。
9、具体的,所述水平绞盘机构包括设置在支架上的水平绞盘和水平绞盘电机以及设置在相邻骨架单元连接处的多个关节绞盘,多个关节绞盘以连接处为中心线在两侧错位布置,且相对摆动一侧的关节绞盘数量大于相对固定一侧的关节绞盘数量,所述软绳通过水平绞盘后沿骨架单元串联方向依次与每个连接处的多个关节绞盘进行交错缠绕,所述交错缠绕以连接处为中心线蛇形通过两侧关节绞盘,从而保证摆动时的稳定性。
10、具体的,所述软管配备有自适应拉伸变化的取样筒组件,所述取样组件沿软管内液体样本流动方向依次设有用于调节软管伸长量的收缩绕管器,用于为液体样本在软管内流动提供动力的水泵,以及用于分流液体样本的多通阀。
11、具体的,所述收缩绕管器包括支架和固定在支架上的壳体,所述壳体内设有固定轴,以及同固定轴转动的转台以及卷簧,所述壳体开有两个用于软管通过的孔位,软管通过孔位进入壳体后缠绕与转台后通过另一个孔位离开壳体,所述卷簧的恢复方向与软管缠绕方向相反。
12、具体的,所述水下机器人本体还搭载用于控制取样装置的视觉控制系统,所述视觉控制系统包设置在水下机器人本体上的双目相机和照明装置,以及用于识别输入图像中海底热液口位置的图像识别装置,以提高采样的准确率。
13、具体的,所述取样筒有多个,多个取样桶并排布置或交错堆叠,当并排布置时可以有效利用水下自主航行器的存储空间,当交错叠放时可以有效避免因取样筒内液体样本晃动影响水下自主航行器的问题。
14、与现有技术相比,本发明的有益效果:
15、采用仿生脖颈关节替代传统折叠式连杆臂,从而在一定程度上降低了水下自主航行器的取样位姿控制要求;
16、采用软绳与弹簧对侧布置的方式,相较于传统的从机构内部穿绳的方式,能够节省内部体积并为取样软管的穿入提供位置,从而优化取样臂的结构设计。
技术特征:1.一种面向海底定点取样的水下自主航行器,其特征在于,包括水下机器人本体和搭载在所述水下机器人本体上的取样装置,所述取样装置包括固定在水下机器人本体上的取样臂和取样筒,以及设置在取样臂自由转动端用于提取液体样本的伸缩取样头,所述伸缩取样头与所述取样筒之间设有用于输送液体样本的软管;
2.根据权利要求1所述的面向海底定点取样的水下自主航行器,其特征在于,所述伸缩取样头包括取样头,从外向内同轴布置的外管,中管和内管,以及带动内管相对与中管和外管运动的伸缩机构,所述内管设有用于软管通过的软管通道,所述取样头通过软管通道与软管连通,所述伸缩机构包括外管外侧设导轨和与导轨滑动配合的同步带夹板,以及为同步带夹板沿管轴向移动提供动力的同步带电机,所述外管和所述中管沿管轴方向均设有避让槽,所述同步带夹板通过所述避让槽与内管固连以带动内管移动。
3.根据权利要求2所述的面向海底定点取样的水下自主航行器,其特征在于,所述内管的伸出端设有与中管端部平行布置的限位板,所述限位板相对中管端部的一端设有多个与中管轴向平行的限位杆,所述中管端部设有用于所述限位杆通过的避让孔。
4.根据权利要求1所述的面向海底定点取样的水下自主航行器,其特征在于,所述垂直绞盘机构包括设置在支架上的垂直绞盘和垂直绞盘电机以及设置在每个骨架单元上的关节绞盘,所述软绳通过垂直绞盘后沿骨架单元串联方向依次与每个骨架单元上的关节绞盘缠绕设置。
5.根据权利要求1所述的面向海底定点取样的水下自主航行器,其特征在于,所述水平绞盘机构包括设置在支架上的水平绞盘和水平绞盘电机以及设置在相邻骨架单元连接处的多个关节绞盘,多个关节绞盘以连接处为中心线在两侧错位布置,且相对摆动一侧的关节绞盘数量大于相对固定一侧的关节绞盘数量,所述软绳通过水平绞盘后沿骨架单元串联方向依次与每个连接处的多个关节绞盘进行交错缠绕,所述交错缠绕以连接处为中心线蛇形通过两侧关节绞盘。
6.根据权利要求1所述的面向海底定点取样的水下自主航行器,其特征在于,所述软管配备有自适应拉伸变化的取样筒组件,所述取样组件沿软管内液体样本流动方向依次设有用于调节软管伸长量的收缩绕管器,用于为液体样本在软管内流动提供动力的水泵,以及用于分流液体样本的多通阀。
7.根据权利要求6所述的面向海底定点取样的水下自主航行器,其特征在于,所述收缩绕管器包括支架和固定在支架上的壳体,所述壳体内设有固定轴,以及同固定轴转动的转台以及卷簧,所述壳体开有两个用于软管通过的孔位,软管通过孔位进入壳体后缠绕与转台后通过另一个孔位离开壳体,所述卷簧的恢复方向与软管缠绕方向相反。
8.根据权利要求1所述的面向海底定点取样的水下自主航行器,其特征在于,所述水下机器人本体还搭载用于控制取样装置的视觉控制系统,所述视觉控制系统包设置在水下机器人本体上的双目相机和照明装置,以及用于识别输入图像中海底热液口位置的图像识别装置。
9.根据权利要求1所述的面向海底定点取样的水下自主航行器,其特征在于,所述取样筒有多个,多个取样桶并排布置或交错堆叠。
技术总结本发明公开了一种面向海底定点取样的水下自主航行器,包括水下机器人本体和搭载在所述水下机器人本体上的取样装置,所述取样装置包括固定在水下机器人本体上的取样臂和取样筒,以及设置在取样臂自由转动端用于提取液体样本的伸缩取样头,所述伸缩取样头与所述取样筒之间设有用于输送液体样本的软管。本发明提供的水下自主航行器搭载有高灵活性的采样机械臂,从而应对真实复杂的海底热液口采样任务。技术研发人员:吴世军,王威奇,杨夏傲,张文博,姜啸风,杨灿军受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/225458.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表