月池系统ROV水下对接装置的制作方法
- 国知局
- 2024-08-01 06:57:25
本发明涉及无人潜器对接,尤其涉及一种月池系统rov水下对接装置。
背景技术:
1、rov(带缆无人水下机器人)收放装置的作用为实现rov从甲板状态和水下状态的切换,具体为通过月池系统从船体内下放至水中。由于海上的特殊作业环境,rov从甲板到水下的过程中,必须要对设备进行止荡,避免设备失控,撞坏设备或船体,对人员造成危险。目前,应用于rov的对接止荡装置仅能实现rov在空气中的对接止荡,当rov入水后,缺少相应的对接止荡措施。
2、在环境恶劣的时候,海面的波浪具有相当的高度,rov在水中的收放难度加大,如果缺少水下对接止荡装置,rov会随着波浪不受控制的游动,不仅会影响人力、降低作业效率,还会对缆绳、设备造成严重危害。
技术实现思路
1、基于上述问题,本发明的目的在于提供一种月池系统rov水下对接装置,为rov的收放提供止荡作用,降低rov水下收放难度。
2、为达上述目的,本发明采用以下技术方案:
3、一种月池系统rov水下对接装置,包括:
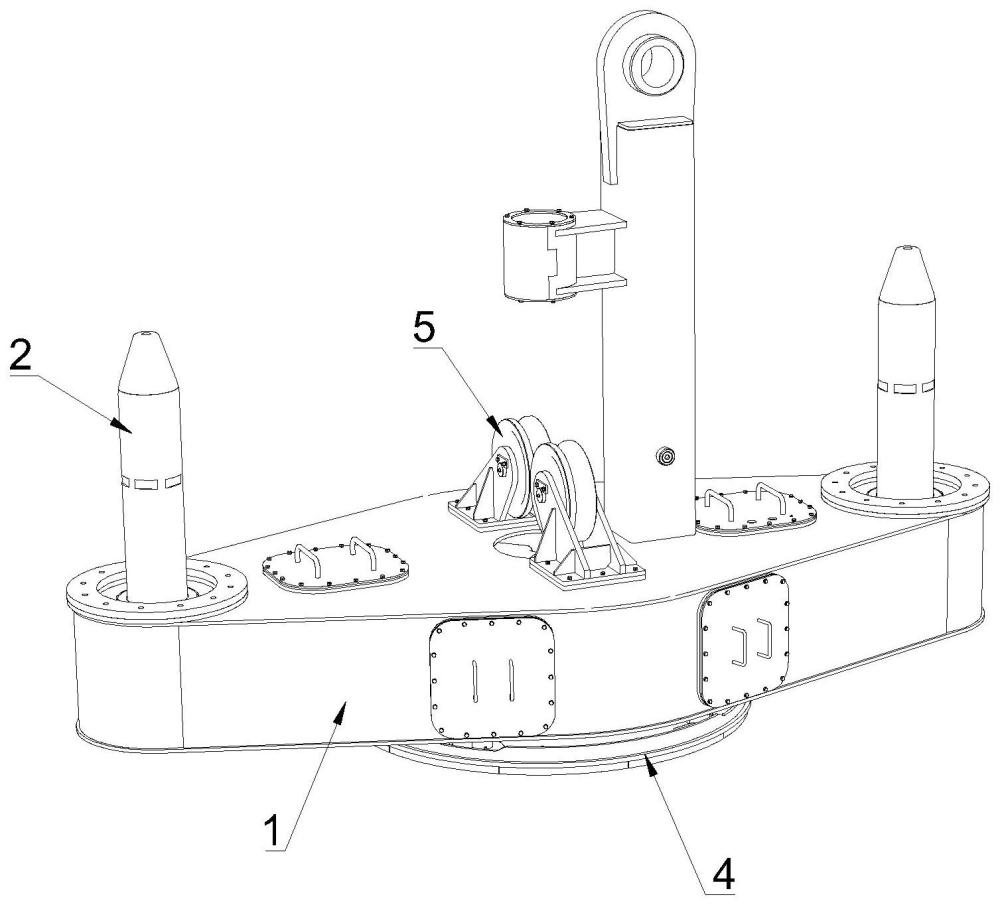
4、装置主体,装置主体的中部设置有对接孔,两端部设置有连接孔;
5、连接组件,用于固定收放钢缆,连接组件通过连接孔与装置主体固连;
6、锁紧组件,设置于装置主体内,用于锁止伸入对接孔中的rov的对接头;
7、压紧组件,设置于装置主体的下表面,用于压紧rov的表面,并与锁紧组件配合,将rov固定在装置主体上。
8、作为一种可选方案,连接组件包括伸入连接孔的对接销,对接销中空,收放钢缆从对接销内穿过,且收放钢缆的端部套环由对接销的下端限位,对接销与连接孔螺纹连接,使得装置主体的两端部的收放钢缆的有效长度可调。
9、作为一种可选方案,连接组件还包括并紧螺母,并紧螺母与连接孔螺纹连接,且并紧螺母与对接销配合将端部套环夹紧。
10、作为一种可选方案,对接销的表面设置有转动驱动槽。
11、作为一种可选方案,锁紧组件包括至少两个沿着对接孔的径向设置的止位卡钳,止位卡钳由卡钳驱动控制相对于对接孔的孔壁伸缩动作,且伸出时止位卡钳对对接头的凸沿形成限位,缩回时止位卡钳对对接头的限位失效。
12、作为一种可选方案,锁紧组件还包括设置于对接孔的孔壁上的导向块,导向块用于引导对接头进入两个止位卡钳之间。
13、作为一种可选方案,压紧组件包括压紧盘和压紧器,压紧器固定在装置主体的下表面,压紧盘由压紧器驱动朝向rov往复移动。
14、作为一种可选方案,压紧盘呈环形,对接头从压紧盘中穿过,若干个压紧器沿着压紧盘的圆周均匀分布。
15、作为一种可选方案,还包括导向组件,导向组件安装在装置主体的上表面,用于对穿过对接孔的rov的光电缆进行引导和限位。
16、作为一种可选方案,导向组件包括两个以对接孔的中心线对称分布的导向轮,两个导向轮对光电缆的两侧形成限位。
17、综上,与现有技术相比,该月池系统rov水下对接装置实现了与rov的可靠对接,以便将rov释放至海底深处及将rov回收至甲板,实现有效止荡,提高收放效率、稳定性和安全性。
技术特征:1.月池系统rov水下对接装置,其特征在于,包括:
2.根据权利要求1所述的月池系统rov水下对接装置,其特征在于,所述连接组件(2)包括伸入所述连接孔(12)的对接销(21),所述对接销(21)中空,所述收放钢缆(6)从所述对接销(21)内穿过,且所述收放钢缆(6)的端部套环(61)由所述对接销(21)的下端限位,所述对接销(21)与所述连接孔(12)螺纹连接,使得所述装置主体(1)的两端部的所述收放钢缆(6)的有效长度可调。
3.根据权利要求2所述的月池系统rov水下对接装置,其特征在于,所述连接组件(2)还包括并紧螺母(22),所述并紧螺母(22)与所述连接孔(12)螺纹连接,且所述并紧螺母(22)与所述对接销(21)配合将所述端部套环(61)夹紧。
4.根据权利要求3所述的月池系统rov水下对接装置,其特征在于,所述对接销(21)的表面设置有转动驱动槽(23)。
5.根据权利要求1所述的月池系统rov水下对接装置,其特征在于,所述锁紧组件(3)包括至少两个沿着所述对接孔(11)的径向设置的止位卡钳(31),所述止位卡钳(31)由卡钳驱动(32)控制相对于所述对接孔(11)的孔壁伸缩动作,且伸出时所述止位卡钳(31)对所述对接头(71)的凸沿形成限位,缩回时所述止位卡钳(31)对所述对接头(71)的限位失效。
6.根据权利要求5所述的月池系统rov水下对接装置,其特征在于,所述锁紧组件(3)还包括设置于所述对接孔(11)的孔壁上的导向块(33),所述导向块(33)用于引导所述对接头(71)进入两个所述止位卡钳(31)之间。
7.根据权利要求1所述的月池系统rov水下对接装置,其特征在于,所述压紧组件(4)包括压紧盘(41)和压紧器(42),所述压紧器(42)固定在所述装置主体(1)的下表面,所述压紧盘(41)由所述压紧器(42)驱动朝向所述rov(7)往复移动。
8.根据权利要求7所述的月池系统rov水下对接装置,其特征在于,所述压紧盘(41)呈环形,所述对接头(71)从所述压紧盘(41)中穿过,若干个所述压紧器(42)沿着所述压紧盘(41)的圆周均匀分布。
9.根据权利要求1所述的月池系统rov水下对接装置,其特征在于,还包括导向组件(5),所述导向组件(5)安装在所述装置主体(1)的上表面,用于对穿过所述对接孔(11)的所述rov(7)的光电缆进行引导和限位。
10.根据权利要求9所述的月池系统rov水下对接装置,其特征在于,所述导向组件(5)包括两个以所述对接孔(11)的中心线对称分布的导向轮(51),两个所述导向轮(51)对所述光电缆的两侧形成限位。
技术总结本发明涉及无人潜器对接技术领域,公开一种月池系统ROV水下对接装置,包括装置主体、连接组件、锁紧组件和压紧组件,其中,装置主体的中部设置有对接孔,两端部设置有连接孔;连接组件用于固定收放钢缆,连接组件通过连接孔与装置主体固连;锁紧组件设置于装置主体内,用于锁止伸入对接孔中的ROV的对接头;压紧组件设置于装置主体的下表面,用于压紧ROV的表面,并与锁紧组件配合,将ROV固定在装置主体上。本发明实现了与ROV的可靠对接,以便将ROV释放至海底深处及将ROV回收至甲板,实现有效止荡,提高收放效率、稳定性和安全性。技术研发人员:王忠强,王凯,阚净,李明尧,周玲,陈洋,余家义受保护的技术使用者:无锡海核装备科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240722/225611.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表