一种智能调控式测绘无人船的制作方法
- 国知局
- 2024-08-01 07:03:08
本发明涉及测绘无人船领域,尤其涉及一种智能调控式测绘无人船。
背景技术:
1、现有技术中,传统的水上测绘往往面临人力成本高、安全风险大、作业效率低等问题,尤其是在危险或不宜人类直接进入的水域进行长时间连续测量时。无人船能够替代人员在恶劣环境下的作业,减轻劳动强度,有效降低人员伤亡风险,并显著提高测绘工作的效率;且双体船相较于单体船在设计上具有更好的稳定性,所以经常应用于测绘领域,但由于人员在操控无人船时,如果错误判断水况,可能会致使船体的侧翼卡在岸边浅滩上,由于不具备除倒船外的脱困能力,在倒船无法脱困的情况下,只能等待人员前往救援,致使测绘工作的中断。
技术实现思路
1、为了克服人员在操控无人船时,如果错误判断水况,可能会致使船体的侧翼卡在岸边浅滩上,由于不具备除倒船外的脱困能力,在倒船无法脱困的情况下,只能等待人员前往救援,致使测绘工作的中断的缺点,本发明提供一种智能调控式测绘无人船。
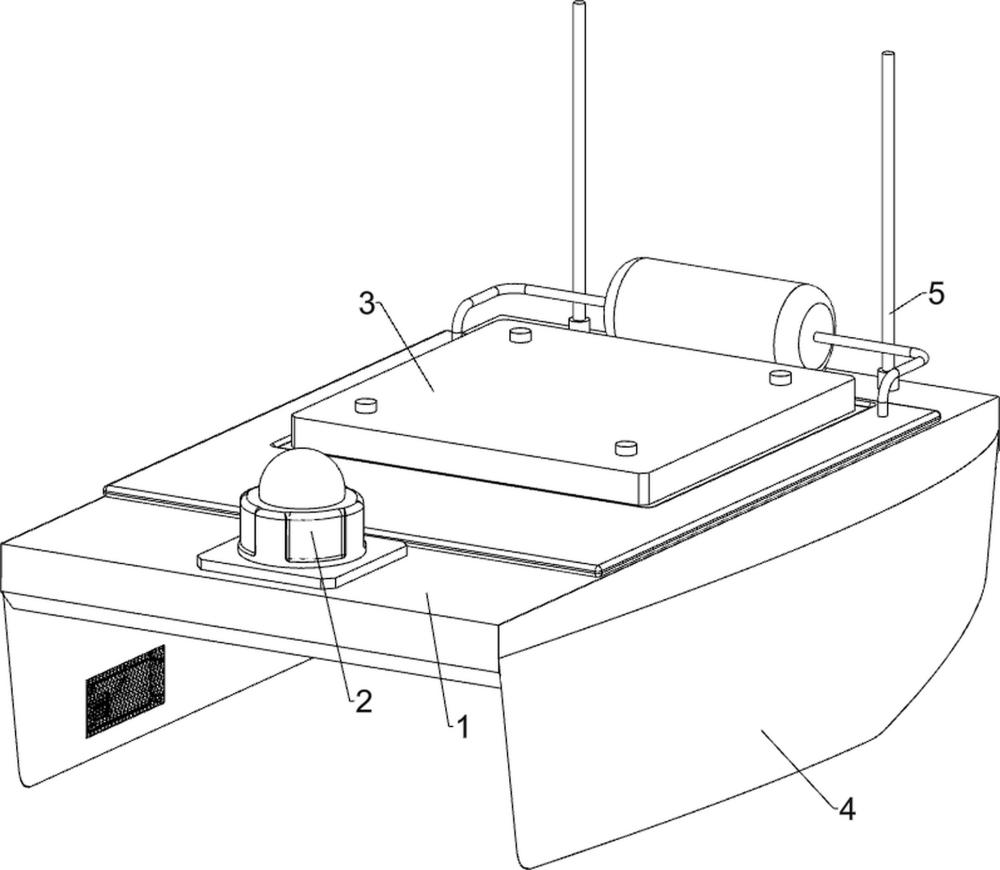
2、本发明的技术方案为:一种智能调控式测绘无人船,包括有船体、摄像头、盖板、船翼、天线、推进器和防水电线;船体上设置有摄像头;船体上固接有盖板,船体内开有用于容纳测绘设备的空腔,盖板用于隔绝空腔与外界;船体上设置有两个船翼;船体上设置有若干个天线;船体上设置有至少两个推进器;每个推进器均连接有一个防水电线;船体内置有电源;所有防水电线均与电源相连;还包括有升降板和驱动件;每个船翼靠近船体一侧的后部均固接有一个升降板;船体上开设有两个第一凹槽;每个第一凹槽内各固接有一个驱动件;每个驱动件的输出端均与相邻升降板固接。
3、作为本发明的一种优选技术方案,驱动件的设置状态为倾斜设置。
4、作为本发明的一种优选技术方案,还包括有限位板;每个船翼靠近船体一侧的后部均固接有一个限位板,且限位板位于升降板后侧;船体后侧开设有与推进器数量匹配的通槽;每个推进器顶部均设置有一个浮块,用于辅助推进器在对应的通槽内进行滑动上浮。
5、作为本发明的一种优选技术方案,还包括有吹动组件和气瓶;每个船翼上靠近船体的一侧均开设有第二凹槽;第二凹槽内设置有吹动组件;船体后侧设置有气瓶;吹动组件包括有第一气囊、弹性件、第一连接块、连接板、第二连接块、喷头和第一气管;第二凹槽内固接有第一气囊,第一气囊与气瓶通过内嵌的连接管相连接,连接管上设置有电磁阀,且第一气囊设置为向靠近船体的方向能够定向膨胀;第一气囊靠近船体的一侧固接有连接板;连接板上固接有偶数个第一连接块;第二凹槽内固接有与第一连接块数量相匹配的弹性件;每个弹性件的伸缩端与对应的第一连接块固接;连接板上固接有第二连接块,第二连接块为中空结构;第二连接块连通有若干个喷头;第二连接块后侧连接有第一气管;第一气管另一端与第一气囊连通;第一气管内置有电磁阀。
6、作为本发明的一种优选技术方案,还包括有第一滤网;每个第二连接块靠近船体的一侧固接有第一滤网,第一滤网与第二凹槽的面积大小相等。
7、作为本发明的一种优选技术方案,还包括有第二气管和第二气囊;气瓶连接有若干个第二气管,第二气管上设置有电磁阀;所有第二气管共同连接有第二气囊,第二气囊围绕盖板四周设置。
8、作为本发明的一种优选技术方案,还包括有推动块、固定块、转动杆和第二滤网;船体后侧固接有两个推动块;每个浮块后侧固接有两个固定块;每两个相邻的固定块之间转动连接有一个转动杆,相邻的转动杆与固定块设置有用于辅助转动杆转动的扭簧;每个转动杆上各固接有一个第二滤网。
9、作为本发明的一种优选技术方案,推动块为倾斜设置。
10、作为本发明的一种优选技术方案,船翼远离船体的一侧设置有橡胶条。
11、作为本发明的一种优选技术方案,船体上设置有驱鸟用的报警器。
12、本发明的有益效果:本发明通过设置有限位板、升降板和驱动件,在船体搁浅在距离较远的浅滩时,通过控制受困一侧的驱动件工作,推动升降板向船尾的方向,倾斜向上移动,进而带动受困一侧的船翼也同向运动,由于将受困一侧的船翼抬起,此时限位板也抬起,即解除对推进器的挤压,让原本处在与浅滩上的泥沙距离较近位置的推进器,在浮力作用下沿着通槽内上浮,从而使推进器向远离泥沙的方向上浮,进而使流经推进器水流变为正常大小,使推进力度较上浮之前更大,在推进器的推动作用下使无人船向后运动,实现让无人船能够自动脱困的目的;
13、通过设置吹动组件,当船翼卡在浅滩上时,打开气瓶内的电磁阀,将气体通入到第一气囊中,从而使第一气囊向船体的方向定向膨胀,进而带动连接板和第一连接块鼓出,进而将弹性件拉伸,此时再控制第一气管内的电磁阀打开,在保持第一气囊的形状不出现大幅度波动的前提下,将气体通入第一气管,进而再通过第二连接块通入喷头中,利用从喷头中喷出的气流,将船翼前侧受困处附近的泥沙吹开,进而降低泥沙对船翼的黏着力,便于船翼更好地从受困处的泥沙中抬升起来;
14、通过设置有气瓶、第二气管和第二气囊,在通过摄像头观察到翻船情况时,控制电磁阀打开,将气瓶中的压缩气体通过第二气管流入第二气囊中,再通过持续通入气体,让船体被膨胀的第一气囊支撑,从而增加盖板与水面的距离,防止在长时间浸泡后,水从盖板边缘的缝隙流入船体内部,便于保护船体内部的精密元件;
15、通过设置有推动块和第二滤网,通过二者的相互配合,在推进器的上浮过程中,推动块挤压第二滤网,使之顺时针旋转九十度,从而使第二滤网挡住推进器尾部,便于阻止杂物从推进器的尾部飘入推进器内部。
技术特征:1.一种智能调控式测绘无人船,包括有船体(1)、摄像头(2)、盖板(3)、船翼(4)、天线(5)、推进器(6)和防水电线(7);船体(1)上设置有摄像头(2);船体(1)上固接有盖板(3),船体(1)内开有用于容纳测绘设备的空腔,盖板(3)用于隔绝空腔与外界;船体(1)上设置有两个船翼(4);船体(1)上设置有若干个天线(5);船体(1)上设置有至少两个推进器(6);每个推进器(6)均连接有一个防水电线(7);船体(1)内置有电源;所有防水电线(7)均与电源相连;其特征是,还包括有升降板(102)和驱动件(103);每个船翼(4)靠近船体(1)一侧的后部均固接有一个升降板(102);船体(1)上开设有两个第一凹槽(1002);每个第一凹槽(1002)内各固接有一个驱动件(103);每个驱动件(103)的输出端均与相邻升降板(102)固接。
2.根据权利要求1所述的一种智能调控式测绘无人船,其特征是,驱动件(103)的设置状态为倾斜设置。
3.根据权利要求1所述的一种智能调控式测绘无人船,其特征是,还包括有限位板(101);每个船翼(4)靠近船体(1)一侧的后部均固接有一个限位板(101),且限位板(101)位于升降板(102)后侧;船体(1)后侧开设有与推进器(6)数量匹配的通槽(1001);每个推进器(6)顶部均设置有一个浮块(6a),用于辅助推进器(6)在对应的通槽(1001)内进行滑动上浮。
4.根据权利要求3所述的一种智能调控式测绘无人船,其特征是,还包括有吹动组件和气瓶(301);每个船翼(4)上靠近船体(1)的一侧均开设有第二凹槽(4001);第二凹槽(4001)内设置有吹动组件;船体(1)后侧设置有气瓶(301);吹动组件包括有第一气囊(201)、弹性件(202)、第一连接块(203)、连接板(204)、第二连接块(205)、喷头(206)和第一气管(207);第二凹槽(4001)内固接有第一气囊(201),第一气囊(201)与气瓶(301)通过内嵌的连接管相连接,连接管上设置有电磁阀,且第一气囊(201)设置为向靠近船体(1)的方向能够定向膨胀;第一气囊(201)靠近船体(1)的一侧固接有连接板(204);连接板(204)上固接有偶数个第一连接块(203);第二凹槽(4001)内固接有与第一连接块(203)数量相匹配的弹性件(202);每个弹性件(202)的伸缩端与对应的第一连接块(203)固接;连接板(204)上固接有第二连接块(205),第二连接块(205)为中空结构;第二连接块(205)连通有若干个喷头(206);第二连接块(205)后侧连接有第一气管(207);第一气管(207)另一端与第一气囊(201)连通;第一气管(207)内置有电磁阀。
5.根据权利要求4所述的一种智能调控式测绘无人船,其特征是,还包括有第一滤网(208);每个第二连接块(205)靠近船体(1)的一侧固接有第一滤网(208),第一滤网(208)与第二凹槽(4001)的面积大小相等。
6.根据权利要求5所述的一种智能调控式测绘无人船,其特征是,还包括有第二气管(302)和第二气囊(303);气瓶(301)连接有若干个第二气管(302),第二气管(302)上设置有电磁阀;所有第二气管(302)共同连接有第二气囊(303),第二气囊(303)围绕盖板(3)四周设置。
7.根据权利要求5所述的一种智能调控式测绘无人船,其特征是,还包括有推动块(401)、固定块(402)、转动杆(403)和第二滤网(404);船体(1)后侧固接有两个推动块(401);每个浮块(6a)后侧固接有两个固定块(402);每两个相邻的固定块(402)之间转动连接有一个转动杆(403),相邻的转动杆(403)与固定块(402)设置有用于辅助转动杆(403)转动的扭簧;每个转动杆(403)上各固接有一个第二滤网(404)。
8.根据权利要求7所述的一种智能调控式测绘无人船,其特征是,推动块(401)为倾斜设置。
9.根据权利要求7所述的一种智能调控式测绘无人船,其特征是,船翼(4)远离船体(1)的一侧设置有橡胶条。
10.根据权利要求9所述的一种智能调控式测绘无人船,其特征是,船体(1)上设置有驱鸟用的报警器。
技术总结本发明涉及测绘无人船领域,尤其涉及一种智能调控式测绘无人船。技术问题:在操控无人船时,如果错误判断水况,可能会致使船体侧翼卡在岸边浅滩上,由于不具备除倒船外的脱困能力,在倒船无法脱困的情况下,只能等待人员前往救援。技术方案:一种智能调控式测绘无人船,包括有船体和摄像头等;船体上设置有摄像头;当船搁浅在距离较远的浅滩时,通过控制受困侧驱动件工作,推动升降板倾斜向上移动,船翼也同向运动,将受困侧船翼抬起,限位板抬起解除对推进器的挤压,让与泥沙距离较近位置的推进器,在浮块作用下沿通槽上浮,从而使之远离泥沙,使推进力度较之前更大,在推进器的带动下使无人船向后运动,实现让无人船能够自动脱困的目的。技术研发人员:王克杰,李小桥,穆玮,米亮受保护的技术使用者:阿尔法测绘科技(广州)有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/225870.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表