一种仿蝠鲼航行器的驱动换向装置
- 国知局
- 2024-08-01 07:03:30
本发明涉及航海,具体而言,涉及一种仿蝠鲼航行器的驱动换向装置。
背景技术:
1、仿蝠鲼航行器是一种基于电机组件驱动胸鳍扑动而实现游动的新型水下无人航行器,通过电机带动胸鳍鳍板实现绕电机轴往复对称转动,从而胸鳍鳍板拍动水流产生游动推力;此航行器方案结构紧凑、生物亲和性好,在水质监测、深海渔场巡视、珊瑚礁考察等方面有着广泛应用。
2、当前仿蝠鲼航行器带动胸鳍扑动的方式分为两大类:一种通过电机换向直接带动胸鳍往复转动,另一种通过电机单向转动配合曲柄摇杆及其他转向机构实现胸鳍往复转动;在一些已有航行器设计中,由内外两不完全齿轮布局与行星齿轮啮合实现转动换向,这种设计在换向过程中,输出轴轴线只是绕输入轴轴线做平行圆周转动,并且换向的转速无法保证一致;还有另一些设计采用差速减速机构实现输出旋转运动的换向驱动,但是这些设计普遍存在零件较多、装配复杂并且体积较大,对装配空间要求很高的情况。
3、综上所述,现有仿蝠鲼航行器的驱动设计存在往复转动控制结构复杂、成本高的技术问题。
技术实现思路
1、本发明要解决的技术问题是现有仿蝠鲼航行器的驱动设计存在往复转动控制结构复杂、成本高的技术问题。
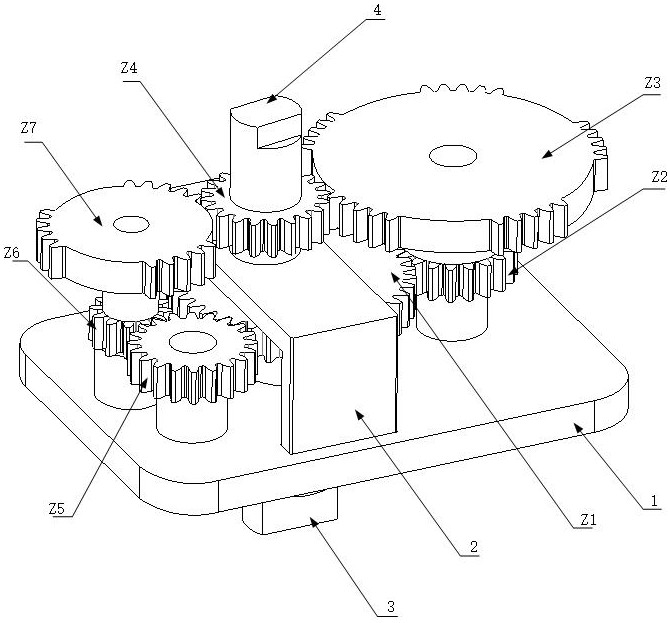
2、为解决上述问题,本发明提供了一仿蝠鲼航行器的驱动换向装置,用于动力连接仿蝠鲼航行器的主体和鳍板,包括固定座、齿轮悬浮架、输入齿轮、正向传动齿轮、正向不完全齿轮、输出齿轮、换向齿轮、反向传动齿轮、反向不完全齿轮;
3、所述输入齿轮、正向传动齿轮、换向齿轮以及反向传动齿轮均转动连接于所述固定座上,所述输入齿轮分别与正向传动齿轮及换向齿轮啮合,所述反向传动齿轮与换向齿轮啮合,所述齿轮悬浮架与固定座连接,并位于所述输入齿轮的上方,所述输出齿轮转动连接于所述齿轮悬浮架上端,所述正向不完全齿轮同轴连接于所述正向传动齿轮上端,所述反向不完全齿轮同轴连接于所述反向传动齿轮上端,所述输出齿轮分别与正向不完全齿轮及反向不完全齿轮间歇啮合,所述输入齿轮用于与位于航行器主体的动力输出模块连接,所述输出齿轮用于与航行器的鳍板连接。
4、该设计由输入轴输入旋转运动,输入齿轮的侧缘分别通过齿轮传动结构传导旋转,并通过换向齿轮实现一侧传动旋转的反向,在与输出齿轮啮合的两个齿轮均采用不完全齿设计,即齿轮外缘的轮齿区域和光滑无轮齿区域间隔设置,而两侧的两个不完全齿轮均与输出齿轮位于啮合区域,且保证二者其一与输出齿轮啮合时,另一者恰好是无轮齿区域与输出齿轮相邻,从而保证了二者的正方向旋转间隔输出,通过各个齿轮结构的齿数配合及不完全齿的齿数配合可以保证不论正向还是反向输出旋转的转速相等且正向旋转与反向旋转的持续时间或间隔时间一致,从而保证了输出运动完全符合航行器左右两侧鳍状桨叶周期往复运动的需求。
5、这种结构主要是利用不完全齿轮啮合齿轮系的传动原理,通过设计齿轮参数实现驱动电机的单向转动即可实现输出旋转运动的往复转向,其结构简单、成本低、稳定性高;通过不完全齿轮的啮入、啮出,并且保证两侧啮合的时间间隔相等,其运转过渡平滑,解决了现有仿蝠鲼航行器的驱动设计存在往复转动控制结构复杂、成本高的技术问题;且通过该设计只需电机输出连续向单向旋转即可实现输出轴的往复旋转,避免电机高频换向转动,降低电机的运转负荷从而有效保护电机,因此能够延长电机使用寿命。
6、作为优选的方案,所述换向齿轮与反向传动齿轮及正向传动齿轮分别位于所述输入齿轮的两侧,所述换向齿轮与反向传动齿轮沿所述固定座的宽度方向设置,所述正向不完全齿轮及反向不完全齿轮的外缘均布有多组齿单元,所述正向不完全齿轮的直径大于反向不完全齿轮的直径,所述正向不完全齿轮上的齿单元组数大于反向不完全齿轮上齿单元的组数,每组齿单元包括的齿数量相等。
7、该设计将正向及反向传动齿轮分别设置于输入齿轮的两侧,以避免二者分布位置同侧或较近造成的占据固定座上较大的宽度空间,造成换向装置的整体宽度过大或两组传动齿轮位置相互干涉影响传动;通过这样的设计能够在一定程度上减小反向不完全齿轮的直径,减小整体传动结构在长度方向占据的空间大小,令换向传动装置整体空间分布趋近于长宽尺寸大小接近的方形状,适应仿蝠鲼航行器的实际内部空间布置需求。
8、作为优选的方案,所述正向不完全齿轮的外周缘设置有五组呈36°间隔角均匀分布的齿单元,所述反向不完全齿轮的外周缘设置有三组呈60°间隔角均匀分布的齿单元。
9、该设计对正向和反向不完全齿轮的齿数和相位均进行对应的优化,其中反向不完全齿和正向不完全齿分别采用三等分和五等分圆周角的设计,主要是出于节省整体安置空间的考虑:由于在反向传动齿轮一侧设置换向齿轮,因此该侧相对占据了更多的靠近固定座一侧的空间,为平衡左右两侧空间,提升传动机构的紧凑性,采用齿数相对较少的反向传动齿轮和反向不完全齿轮,因此,反向不完全齿轮采用齿相位角更大的设计,以保证其较高的角速度情况下依然与正向不完全齿输出相同的线速度,保证正向及反向输出的旋转速度一致。
10、作为优选的方案,还包括同轴设置的输入轴和输出轴,所述输入轴转动连接在固定座,所述输入轴一端与输入齿轮同轴连接,所述输入轴另一端穿过固定座并用于与位于航行器主体的动力输出模块连接,所述固定座呈平板状;所述齿轮悬浮架呈两端下弯、中部凸起的条板结构,所述输出轴的一端与输出齿轮同轴连接,所述输出轴的另一端与齿轮悬浮架的中部凸起部分连接,所述齿轮悬浮架的两端端部与所述固定座安装固定。
11、该设计优化固定座以及齿轮悬浮架二者的结构设计以及二者的配合结构,二者均采用板状结构,齿轮悬浮架的中部以一个预设的间距位于固定座一侧上方,通过该结构将换向装置的各个齿轮结构从水平面分布替换成部分结构竖向分布,在一定程度减小所占据的水平空间,更多的利用竖向的空间,优化了整体的空间布局;而输入轴与输出轴的同轴分布令换向装置的在径向以及周向的强度更好,提升传动结构的耐用性;且通过齿轮悬浮架的结构定位输出轴及输出齿轮,通过这样的结构可以不采用一般的外壳体类的结构支撑输出轴,简化了换向装置的整体设计,且便于安装与检修。
12、作为优选的方案,所述输入齿轮经正向传动齿轮一侧将旋转传递至所述输出齿轮的传动减速比为1:5;所述输入齿轮经反向传动齿轮一侧将旋转传递至所述输出齿轮的传动减速比也为1:5。该设计提供了一种优选的传动减速比设计,充分适应航行器常用的动力输出模块工作参数以及航行器实际动力的需求。
13、作为优选的方案,所述输入齿轮的齿数为20,所述正向传动齿轮的齿数为20,所述正向不完全齿轮的总齿数为50,所述反向传动齿轮的齿数为12,所述反向不完全齿轮的总齿数为30。该设计提供了一种优选的传动机构齿数分布设计,适应一般尺寸型号的航行器工作需求。
14、作为优选的方案,所述固定座上设置有多根竖向的固定轴,所述正向传动齿轮与正向不完全齿轮二者为一体连接的单轴双轮结构;所述反向传动齿轮与反向不完全齿轮二者为一体连接的单轴双轮结构,所述正向传动齿轮与正向不完全齿轮、换向齿轮以及反向传动齿轮和反向不完全齿轮分别可转动连接于三根间隔预设距离的固定轴。该设计优化了齿轮分布设计,将可做结构简化的两组齿轮即正向传动齿轮与正向不完全齿轮和反向传动齿轮与反向不完全齿轮各自合成两个一体的齿轮组合结构,降低了装配成本;各齿轮通过固定轴的结构与固定座转动连接,齿轮与固定轴之间可转动连接,通过卡簧、键等结构实现齿轮与固定轴之间的定位配合。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225897.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表