一种自主巡航式船舶货舱清洗装置及其工作方法
- 国知局
- 2024-08-01 07:05:38
本发明涉及海洋工程,具体而言,尤其涉及一种自主巡航式船舶货舱清洗装置及其工作方法。
背景技术:
1、受现有船舶货舱舱壁高度影响,为了防止清洗舱壁过程中工作人员发生意外事故,且当前货舱舱壁的清洗无法进行大面积自动化清洗工作,实现高效清洗。当前船舶货舱清洗工作主要采用人工手动的方式,一般流程为:扫舱,正式清洗之前,工程操纵人员先用竹竿、扫把等工具对船舱进行整体的清扫;预洗,工程操纵人员需要组装高压水枪,将压缩空气管和消防水管连接到高压水枪上;化学品船洗舱,工程人员需要组装化学品泵和化学品长枪,然后连接压缩空气和化学品;高压海水整体冲洗,使用高压水枪连接海水进行再次完整清洗,按照从高到低的路径进行步步清洗;局部检查和淡水冲洗,工程操纵人员先对清洗情况进行检查,必要的话,进行二次清洗和冲洗。这种方式虽然清洗的较为干净,但是由于步骤过为繁琐,极大地影响清洗效率。
技术实现思路
1、根据上述提出的技术问题,而提供一种自主巡航式船舶货舱清洗装置及其工作方法。
2、本发明采用的技术手段如下:
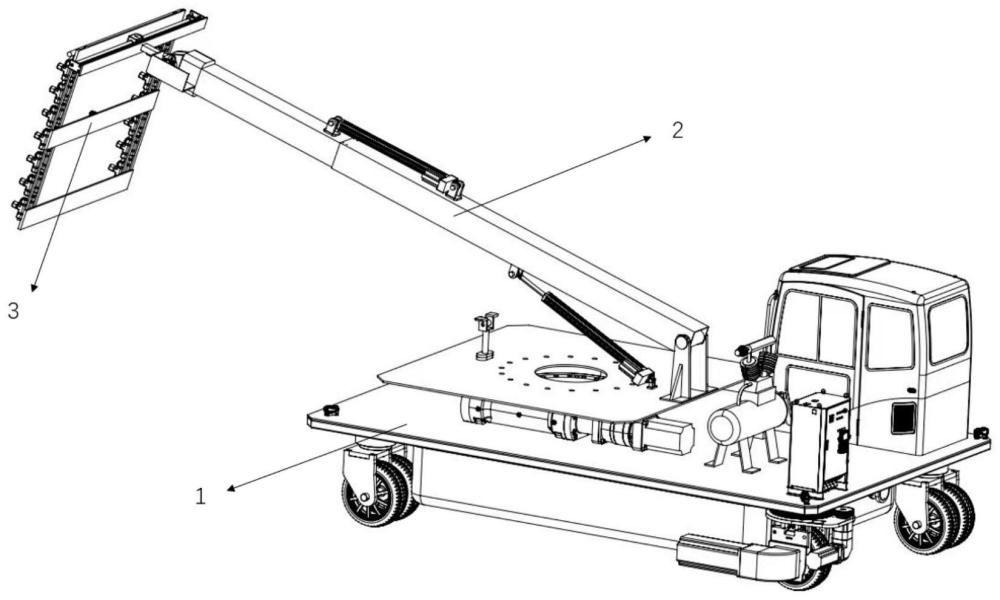
3、一种自主巡航式船舶货舱清洗装置,包括:自主巡航式全向底盘、可回转可伸缩式操作臂和高压喷头往复喷洗装置,所述可回转可伸缩式操作臂安装在自主巡航式全向底盘上,所述高压喷头往复喷洗装置连接在可回转可伸缩式操作臂的前端,所述自主巡航式全向底盘用于带动可回转可伸缩式操作臂到达预定清洗位置,所述可回转可伸缩式操作臂用于实现高压喷头往复喷洗装置的位置调整,所述高压喷头往复喷洗装置用于对货舱舱壁进行高压喷洗。
4、进一步地,所述自主巡航式全向底盘包括底盘本体、安装在底盘本体上层的驾驶台和机器人电控柜及操作盒、安装在底盘本体下层的水箱和全向底盘动力装置,所述可回转可伸缩式操作臂安装在底盘本体上;
5、所述机器人电控柜及操作盒位于底盘本体的尾部,用于提供电力;所述全向底盘动力装置与机器人电控柜及操作盒连接,用于驱动自主巡航式全向底盘进行移动,实现自主巡航式全向底盘周围四面与舱壁平行,预停在货舱待清洗位置;所述水箱与供水系统相连,并通过供水管路与高压喷头往复喷洗装置相连,用于为高压喷头往复喷洗装置提供清洗液体。
6、进一步地,所述驾驶台内装配有控制单元,所述控制单元至少包括伸缩臂液压缸控制单元、回转电机控制单元、增压泵控制单元、载具推进控制单元、激光测距信号处理单元;
7、所述全向底盘动力装置包括安装在底盘本体下层的前部和尾部的从动轮和主动舵轮,所述主动舵轮的回转运动以及直线运动带动从动轮动作;其中所述从动轮包括前置从动轮和后置从动轮,所述主动舵轮包括前置主动舵轮和后置主动舵轮,所述前置从动轮、后置从动轮、前置主动舵轮和后置主动舵轮分布在底盘本体的四角,所述前置从动轮和前置主动舵轮位于前侧,所述后置从动轮和后置主动舵轮位于后侧,所述前置从动轮和后置从动轮呈对角设置,所述前置主动舵轮和后置主动舵轮呈对角设置。
8、进一步地,所述自主巡航式全向底盘还包括距离检测装置,所述距离检测装置包括安装在底盘本体上层四角和前方的多个激光传感器,用于检测自主巡航式全向底盘四周距离舱壁的距离;所述激光传感器与驾驶台的激光测距信号处理单元电性连接,用于将检测的距离信号传输给激光测距信号处理单元。
9、进一步地,所述可回转可伸缩式操作臂包括位于中部的多层可移动伸缩臂、伸缩驱动缸、固定主臂、变幅驱动缸、支架和回转装置,所述多层可移动伸缩臂的一侧与高压喷头往复喷洗装置的清洗转向机构相连,另一侧通过伸缩驱动缸与固定主臂的一侧连接;所述伸缩驱动缸用于实现多层可移动伸缩臂相对固定主臂进行伸缩;
10、所述固定主臂的另一侧与支架相连,所述变幅驱动缸的一侧与固定主臂相连,另一侧与支架相连;所述变幅驱动缸用于实现固定主臂的变幅运动;所述支架连接在回转装置上,所述回转装置连接在自主巡航式全向底盘上,用于实现固定主臂的回转运动,将高压喷头往复喷洗装置运动到合适的横向位置。
11、进一步地,所述变幅驱动缸的内部结构与所述伸缩驱动缸的内部结构相同,功率和型号比伸缩驱动缸大;
12、所述回转装置为蜗轮蜗杆,包括蜗轮、蜗杆和液压马达,所述液压马达与蜗杆相连,所述蜗杆与蜗轮相连,所述蜗轮与支架相连;所述蜗杆的非输入端具有编码器,用于记录蜗杆的工作圈数。
13、进一步地,所述高压喷头往复喷洗装置包括位于前端的多组串联式高压喷嘴、承重挡板、长距离丝杠滑台、清洗转向机构和回转电机,所述多组串联式高压喷嘴固定在承重挡板上,与自主巡航式全向底盘的水箱通过供水管路相连;所述承重挡板与长距离丝杠滑台滑动连接,所述长距离丝杠滑台用于带动多组串联式高压喷嘴进行横向往复移动;
14、所述长距离丝杠滑台与清洗转向机构相连,所述清洗转向机构与回转电机相连,所述回转电机用于实现清洗转向机构进行纵向回转运动,调整多组串联式高压喷嘴的纵向位置,使串联式高压喷嘴喷出的高压水柱直喷于货舱壁面。
15、进一步地,所述高压喷头往复喷洗装置还包括喷洗距离测量装置,所述喷洗距离测量装置包括安装在多组串联式高压喷嘴上的两个喷洗激光传感器,用于测量多组串联式高压喷嘴至舱壁壁面的距离,实现调控多组串联式高压喷嘴距离货舱壁面距离。
16、进一步地,所述水箱与多组串联式高压喷嘴之间的供水管路上连接有增压泵。
17、本发明还提供了一种自主巡航式船舶货舱清洗装置的工作方法,包括如下步骤:
18、所述机器人电控柜及操作盒提供自主巡航式全向底盘、可回转可伸缩式操作臂和高压喷头往复喷洗装置所需电力;
19、进行清洗前自主巡航式全向底盘停靠,当所述驾驶台操控载具推进控制单元,控制主动舵轮前后移动和转向移动,主动舵轮带动从动舵轮的前后移动和转向移动,实现自主巡航式全向底盘预停在货舱待清洗位置,所述激光传感器检测自主巡航式全向底盘四周距离舱壁的距离,检测的距离信号传输给驾驶台激光测距信号处理单元,驾驶台根据处理的距离信号操控载具推进控制单元,保证自主巡航式全向底盘四面与舱壁平行;
20、进行回转装置动作,所述回转装置搭载可回转可伸缩式操作臂,当驾驶台操控伸缩臂液压缸控制单元,控制蜗轮蜗杆的液压马达启动,液压马达带动蜗杆旋转,蜗杆与蜗轮啮合,带动蜗轮作水平旋转指定圈数,使得可回转可伸缩式操作臂抵达清洗区域正下方;
21、进行清洗前可回转可伸缩式操作臂动作,当驾驶台操控伸缩臂液压缸控制单元,控制所述伸缩驱动缸和变幅驱动缸动作,带动多层可移动伸缩臂伸缩和固定主臂的变幅运动,所述高压喷头往复喷洗装置抵达待清洗区域,固定主臂和支架用于稳定支撑所述多层可移动伸缩臂,同时可控制蜗轮蜗杆回转角度微调;
22、进行清洗前回转电机动作,当驾驶台操控回转电机控制单元,控制所述回转电机带动清洗转向机构转动,所述多组串联式高压喷嘴正对待清洗壁面时,由承重挡板搭载的长距离丝杠滑台启动,带动所述多组串联式高压喷嘴水平往复移动,驾驶台操控增压泵控制单元,增压泵启动,清洗液体提供,为所述水箱与多组串联式高压喷嘴之间的供水管路提供压力和扬程,喷洗过程中两个喷洗激光传感器检测多组串联式高压喷嘴至壁面的距离,检测的距离信号传输给驾驶台激光测距信号处理单元,驾驶台根据处理的距离信号操控载具推进控制单元,调控多组串联式高压喷嘴距离货舱壁面距离。
23、较现有技术相比,本发明具有以下优点:
24、1、本发明通过设计一种自主巡航式船舶货舱清洗装置,实现船舶的货舱的全自动清洗作业,节省清洗的人力成本,缩短清洗作业时间,避免作业人员的高空作业,有效的提升清洗作业的效率和安全。
25、2、本发明通过自主巡航式全向底盘的底盘本体四周设置五个激光传感器,来实时的监测自主巡航式全向底盘在货舱的位置。
26、3、本发明通过可回转可伸缩式操作臂的伸缩驱动缸实现多层伸缩臂的伸缩,通过清洗转向机构改变高压喷头往复喷洗装置的角度,实现纵向位置的调整。
27、4、本发明通过高压喷头往复喷洗装置的往复滑台的往复运动对待清洗位置进行高压反复喷洗,并通过上下喷洗激光传感器检测喷洗装置距离舱壁的距离。
28、基于上述理由本发明可在清洗等领域广泛推广。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226090.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
船舶支柱及船舶的制作方法
下一篇
返回列表