一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法
- 国知局
- 2024-08-01 07:06:14
本发明属于生物机器人、水下机器人领域,尤其涉及一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法。
背景技术:
1、现有的仿生鱼形机器人主要可以分为以下金鱼型仿生机器人、鲫鱼型仿生机器人、鳐鱼型仿生机器人等。金鱼型仿生机器人模仿金鱼的外形和游泳方式,通常具有流线型的身体和尾鳍,其外形美观、仿真度高、易于控制但是其运动效率相对较低,不适合进行长时间的水下任务;鲫鱼型仿生机器人通常具有较为灵活的机械结构和尾鳍,其机动性较高、适应性强、能够模拟鱼类的生态行为,但是其机械结构复杂、制造和控制的难度较大;鳐鱼型仿生机器人通常具有扁平的身体和长而宽的尾巴,其在海底潜行时具有优秀的稳定性和机动性,能够适应不同深度的海洋环境,但是因为其游泳方式相对特殊,在机器人的设计和控制方面比较复杂。
2、现有仿生鱼形机器人存在水动力学效能不佳,导致推进效率不佳;运动稳定性差,难以保持稳定的姿态;运动灵活性不足,无法实现多样化的运动方式;机械结构复杂性较高,增加了制造和维护成本;能源消耗过大,限制了长时间的工作能力;以及控制算法不够优化,难以实现稳定的运动和姿态调整。
技术实现思路
1、本发明目的在于提供一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法,以解决上述的技术问题。
2、为解决上述技术问题,本发明的一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法的具体技术方案如下:
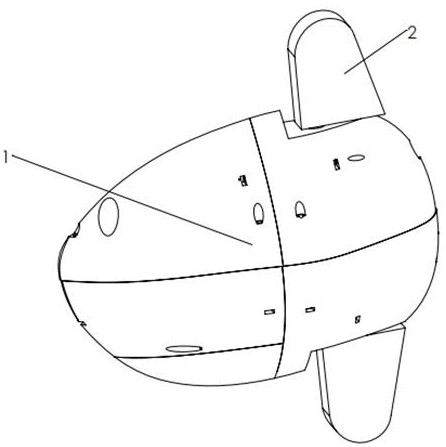
3、一种双尾鳍耦合驱动的翻车鱼型仿生机器人,包括外壳、仿生双尾鳍、直流伺服电机模块、控制系统,所述直流伺服电机模块包括两个,分别对称安装在外壳左右两侧,所述直流伺服电机模块两端从外壳内向外壳外延伸出外壳,所述仿生双尾鳍安装在直流伺服电机模块两端,所述仿生双尾鳍摆动方向与直流伺服电机模块转动方向一致,所述控制系统安装在外壳中部,所述直流伺服电机模块与控制系统电连接,所述控制系统用于控制直流伺服电机模块工作。
4、进一步的,所述外壳包括左上壳体、右上壳体、左下壳体、右下壳体,所述左上壳体、右上壳体、左下壳体、右下壳体围合形成与翻车鱼的身体结构相同的形状。
5、进一步的,所述右上壳体上方处具有供直流伺服电机模块通过的轴孔一,所述右下壳体下方处具有供直流伺服电机模块通过的轴孔二,所述轴孔一和轴孔二大小形状完全相同,所述左上壳体上方对称分布两个供控制系统信息传输的航空插头接孔一和航空插头接孔二。
6、进一步的,所述仿生双尾鳍包括上尾鳍、下尾鳍,所述上尾鳍和下尾鳍与翻车鱼鱼鳍曲线相同,所述仿生双尾鳍的摆动方向与直流伺服电机摆动方向一致。
7、进一步的,所述上尾鳍和下尾鳍的受力面积为7375.1mm。
8、进一步的,所述直流伺服电机模块包括直流伺服电机、输出轴、电机上外壳和电机下外壳;所述电机上外壳和电机下外壳共同固定直流伺服电机,所述直流伺服电机通过输出轴连接仿生双尾鳍,所述输出轴位于电机上外壳上方并固定安装在直流伺服电机的中部,所述输出轴顶端从电机上外壳的轴孔三延伸出电机上外壳和右上壳体,所述输出轴与右上壳体不直接接触,所述输出轴和轴孔三之间通过o型橡胶圈动态密封,所述电机下外壳有可供导线穿过的过孔,所述直流伺服电机通过电机下外壳的过孔与控制系统电连接。
9、进一步的,所述直流伺服电机自带编码器,编码器与控制系统信号连接。所述控制系统通过rs对直流伺服电机进行控制。
10、进一步的,所述轴孔三内壁具有两层密封圆形沟槽,密封圆形沟槽内具有o型橡胶圈,形成两层密封圈结构。
11、本发明还公开了一种双尾鳍耦合驱动的翻车鱼型仿生机器人的控制方法,包括如下步骤:
12、步骤1:左下壳体、配重仓、下尾鳍、右下壳体首先入水,机器人处于负浮力状态;
13、步骤2:上尾鳍逐渐浸于水中至完全浸没时,控制系统通过控制直流伺服电机的旋转从而控制输出轴旋转,使上下两侧的输出轴同时摆动;在上尾鳍和下尾鳍在向一侧摆动时,推动水流朝相反方向移动,这种摆动周期的重复使得水流产生连续的推力,此时上尾鳍和下尾鳍耦合摆动产生水平和垂直方向的推力,水平方向的推力使机器人向前移动,而垂直方向的推力维持机器人整体的姿态和稳定性。
14、本发明的一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法具有以下优点:
15、本发明的双尾鳍耦合驱动的翻车鱼型仿生机器人模仿了翻车鱼独特的身体结构和游泳方式,具有优秀的水动力学效能。其扁平的身体和尾鳍设计能够产生高效的推进力,使机器人在水中具有良好的推进性能。
16、本发明能够模仿翻车鱼特有的游动方式,包括垂直游动。这种灵活的运动方式使得机器人能够在水中实现多样化的运动,适应不同的任务需求和环境条件。
17、本发明具有较好的自动稳定性,能够在水中保持平衡和稳定的姿态。这得益于翻车鱼的特殊身体结构和游泳方式,使得仿生机器人在水中具有良好的适应性和控制性能。
技术特征:1.一种双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,包括外壳(1)、仿生双尾鳍(2)、直流伺服电机模块(3)、控制系统(4),所述直流伺服电机模块(3)包括两个,分别对称安装在外壳(1)左右两侧,所述直流伺服电机模块(3)两端从外壳(1)内向外壳(1)外延伸出外壳(1),所述仿生双尾鳍(2)安装在直流伺服电机模块(3)两端,所述仿生双尾鳍(2)摆动方向与直流伺服电机模块(3)转动方向一致,所述控制系统(4)安装在外壳(1)中部,所述直流伺服电机模块(3)与控制系统(4)电连接,所述控制系统(4)用于控制直流伺服电机模块(3)工作。
2.根据权利要求1所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述外壳(1)包括左上壳体(11)、右上壳体(12)、左下壳体(13)、右下壳体(14),所述左上壳体(11)、右上壳体(12)、左下壳体(13)、右下壳体(14)围合形成与翻车鱼的身体结构相同的形状。
3.根据权利要求2所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述右上壳体(12)上方处具有供直流伺服电机模块(3)通过的轴孔一(121),所述右下壳体(14)下方处具有供直流伺服电机模块(3)通过的轴孔二(141),所述轴孔一(121)和轴孔二(141)大小形状完全相同,所述左上壳体(11)上方对称分布两个供控制系统(4)信息传输的航空插头接孔一(111)和航空插头接孔二(112)。
4.根据权利要求1所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述仿生双尾鳍(2)包括上尾鳍(21)、下尾鳍(22),所述上尾鳍(21)和下尾鳍(22)与翻车鱼鱼鳍曲线相同,所述仿生双尾鳍(2)的摆动方向与直流伺服电机(31)摆动方向一致。
5.根据权利要求4所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述上尾鳍(21)和下尾鳍(22)的受力面积为7375.1mm。
6.根据权利要求4所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述直流伺服电机模块(3)包括直流伺服电机(31)、输出轴(32)、电机上外壳(33)和电机下外壳(34);所述电机上外壳(33)和电机下外壳(34)共同固定直流伺服电机(31),所述直流伺服电机(31)通过输出轴(32)连接仿生双尾鳍(2),所述输出轴(32)位于电机上外壳(33)上方并固定安装在直流伺服电机(31)的中部,所述输出轴(32)顶端从电机上外壳(33)的轴孔三(331)延伸出电机上外壳(33)和右上壳体(12),所述输出轴(32)与右上壳体(12)不直接接触,所述输出轴(32)和轴孔三(331)之间通过o型橡胶圈动态密封,所述电机下外壳(34)有可供导线穿过的过孔(341),所述直流伺服电机(31)通过电机下外壳(34)的过孔(341)与控制系统(4)电连接。
7.根据权利要求4所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述直流伺服电机(31)自带编码器,编码器与控制系统(4)信号连接,所述控制系统(4)通过rs对直流伺服电机(31)进行控制。
8.根据权利要求6所述的双尾鳍耦合驱动的翻车鱼型仿生机器人,其特征在于,所述轴孔三(331)内壁具有两层密封圆形沟槽,密封圆形沟槽内具有o型橡胶圈,形成两层密封圈结构。
9.一种如权利要求1-8任一项所述的双尾鳍耦合驱动的翻车鱼型仿生机器人的控制方法,其特征在于,包括如下步骤:
技术总结本发明属于生物机器人、水下机器人领域,公开了一种双尾鳍耦合驱动的翻车鱼型仿生机器人及控制方法,包括外壳、仿生双尾鳍、直流伺服电机模块、控制系统,所述直流伺服电机模块包括两个,分别对称安装在外壳左右两侧,直流伺服电机模块两端从外壳内向外壳外延伸出外壳,仿生双尾鳍安装在直流伺服电机模块两端,仿生双尾鳍摆动方向与直流伺服电机模块转动方向一致,控制系统安装在外壳中部,直流伺服电机模块与控制系统电连接,控制系统用于控制直流伺服电机模块工作。本发明模仿了翻车鱼独特的身体结构和游泳方式,具有优秀的水动力学效能。其扁平的身体和尾鳍设计能够产生高效的推进力,使机器人在水中具有良好的推进性能。技术研发人员:黄忠,宋至浩,黄梦醒,毋媛媛,黄立东,刘全超,王冠军受保护的技术使用者:海南大学技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/226146.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表