一种双驱动拖轮电力推进系统及其工作模式智能调节方法与流程
- 国知局
- 2024-08-01 07:06:21
本发明涉及一种船舶电力推进系统,尤其是涉及一种双驱动拖轮电力推进系统及其工作模式智能调节方法。
背景技术:
1、随着船用电池技术的发展,使用基于配置储能的船舶油电混合动力系统达到节省燃油消耗,保护海洋环境的目的已成为趋势。能够快速调节船舶油电混合动力系统工作,让船舶油电混合动力系统高效判断,准确判断当前工作模式与状态成为了当前的必要条件,同时在一些特殊条件下例如需要静音作业、在排放敏感区域等等地区,需要快速切换锂电池工作。
2、中国专利申请号为201220488313.2公开了一种船舶混合动力系统,包括柴油发动主机、减速齿轮箱、轴带电机、发电机组、变频器、配电板及螺旋桨,该柴油发动主机的输出端连接该减速齿轮箱的输入端,该减速齿轮箱的第一输出端连接该螺旋桨,第二输出端连接该轴带电机,该发电机组电连接该配电板,该配电板电连接该有源前端变频器,该变频器电连接该轴带电机。中国专利申请号为201621314409.1公开了一种船舶混合动力系统,包括燃油发电机组和电动机组,所述燃油发电机组包括燃油机,燃油机与同步发电机电连接,所述同步发电机的输出端连接有ac/dc变换器,ac/dc变换器接入直流母排,所述电动机组包括充电器,所述充电器的输出端连接动力蓄能电池,所述动力蓄能电池的输出端连接有双向dc/dc变换器,dc/dc变换器接入所述直流母排,所述直流母排的输出端连接有两路负载模块,分别是调距桨模块和日常设备模块。以上发明公开了船舶混合动力系统的结构组成,能够调节船舶油电混合动力系统的工作状态,但对判断当前工作模式与状态,未给出具体技术方案和优化处理,另外,以上发明未涉及电力推进系统工作模式的智能调节方法。
3、工程作业船在拖带大型船舶的情况下,其螺旋桨为拖力型设计,当船舶在低速下被拖动时,拖轮螺旋桨转速达到目标值,此时拖轮会对外输出大推力,对比航行模式下,功率吸收有所改变,但柴油发动主机能力并未发生改变,能量综合利用效率不高。
技术实现思路
1、发明目的:针对上述问题,本发明的目的是提供一种双驱动拖轮电力推进系统,能够根据当前工作状态实现工作模式的智能切换,提高能量综合利用效率。并提供了其工作模式智能调节方法。
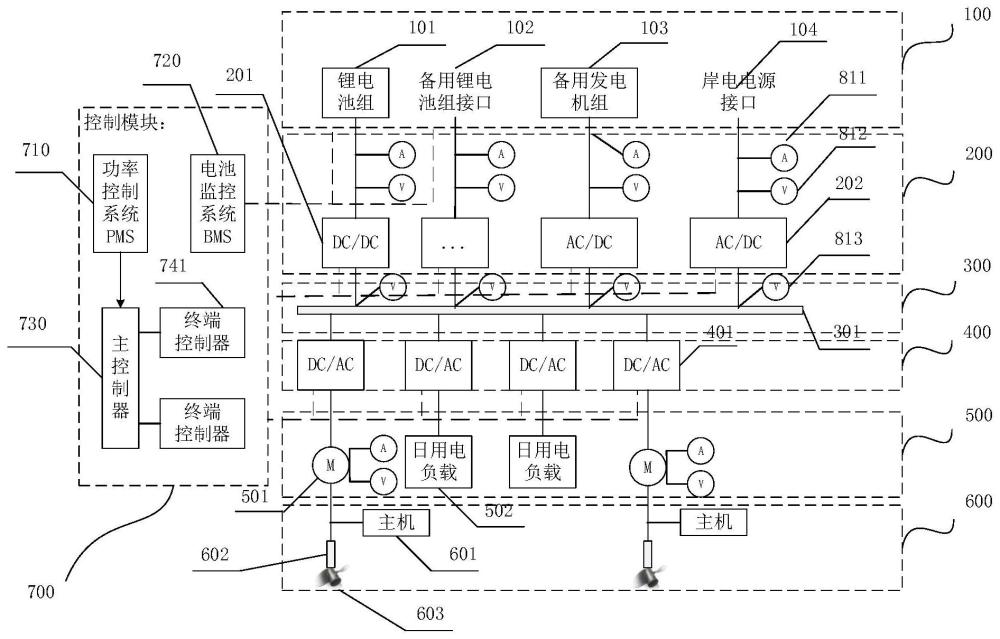
2、技术方案:一种双驱动拖轮电力推进系统,包括电源模块、供电执行模块、直流母线组件、负载执行模块、负载模块、机械驱动模块、控制模块、传感器模块,电源模块包括锂电池组件、备用通电模块,两者分别通过供电执行模块与直流母线组件中的直流母线连接,锂电池组件包括多个锂电池组,负载模块通过负载执行模块与直流母线连接,使电源模块能够通过直流母线为负载模块供电,负载模块包括推进电机组,机械驱动模块包括主机驱动模块、螺旋桨组,主机驱动模块、推进电机组分别与螺旋桨组动力连接形成双驱动,锂电池组件、供电执行模块、负载执行模块分别与控制模块连接,传感器模块用于采集主机驱动模块、螺旋桨组的信号以及电源模块与供电执行模块之间、供电执行模块与直流母线之间的信息并传递给控制模块。
3、电源模块作为电能提供者,负责为负载模块、推进电机组提供电能,其中锂电池组能量占比较高;系统启动时优先使用锂电池组供电,备用通电模块满足条件时启动。
4、进一步的,锂电池组件还包括备用锂电池组接口,备用通电模块包括备用发电机组、岸电电源接口,供电执行模块包括斩波组件、整流组件,多个锂电池组、备用锂电池组接口分别通过一个斩波组件与直流母线连接,备用发电机组、岸电电源接口分别通过一个整流组件与直流母线连接,斩波组件、整流组件分别与控制模块连接。
5、最佳的,斩波组件为dc/dc,整流组件为ac/dc。
6、进一步的,负载执行模块包括多个逆变组件,负载模块还包括至少一个日用电负载,推进电机组包括至少两个推进电机,推进电机、日用电负载分别通过一个逆变组件与直流母线连接,多个逆变组件分别与控制模块连接。
7、最佳的,逆变组件为dc/ac,推进电机为轴带电机。
8、最佳的,主机驱动模块包括柴油发动主机、齿轮箱,螺旋桨组至少包括两个螺旋桨,每个螺旋桨分别配置有一个柴油发动主机及一个推进电机,柴油发动主机分别通过一个齿轮箱与对应的一个螺旋桨连接,每个齿轮箱的输出端分别与传感器模块连接。
9、进一步的,控制模块包括功率控制系统pms、电池组监控系统bms、主控制器、终端控制器,功率控制系统pms为内嵌于主控制器的软件系统,锂电池组件与电池组监控系统bms信号连接,供电执行模块、负载执行模块分别通过终端控制器与主控制器信号连接,传感器模块与主控制器信号连接。
10、进一步的,传感器模块包括分别与控制模块信号连接的电流传感器、电压传感器一、电压传感器二、电磁脉冲传感器一、电磁脉冲传感器二、扭矩传感器一、扭矩传感器二,电源模块与供电执行模块之间设有多个电流传感器和电压传感器一,供电执行模块与直流母线之间设有多个电压传感器二,电磁脉冲传感器一、扭矩传感器一分别安装于螺旋桨组上,电磁脉冲传感器二、扭矩传感器二分别安装于机械驱动模块上。
11、一种上述的双驱动拖轮电力推进系统的工作模式智能调节方法,包括以下步骤:
12、步骤一:参数设定;
13、设锂电池组电量充满时电量为q100%;锂电池组的当前电量q剩余20%时的电量为q20%,作为保持续航力的下限阈值;锂电池组的当前电量q剩余50%时的电量为电量q50%,作为锂电池充电模式转换阈值;机械驱动模块低速运行时额定功率为p2l、高速运行时额定功率为p2h;
14、步骤二:参数检测;
15、s21:检测锂电池组当前电量q;
16、控制模块通过传感器模块采集电路参数信息,通过运算获得锂电池组的当前电量q,记每一个锂电池组的电量为q1,...,qn;
17、s22:检测螺旋桨组工作时功率p1;
18、控制模块通过传感器模块采集螺旋桨组的转速n1、扭矩t1,根据公式得出螺旋桨组在工作时的功率p1;
19、s23:检测机械驱动模块运行功率p2;
20、控制模块通过传感器模块采集机械驱动模块的转速n2、扭矩t2,根据公式得出柴油发动主机在工作时的功率p2;
21、s24:检测锂电池组工作功率pb;
22、控制模块通过传感器模块测出锂电池组内每一个锂电池的电压u,即每一个锂电池的电压为u1,u2;通过多个电流传感器测出锂电池组内每一个锂电池电流i,即每一个锂电池的电量为i1,i2;根据公式p=ui可得每一个锂电池的功率pb1,pb2;
23、步骤三:判断工作是否结束;
24、s31:若船舶继续运行航行,则进入步骤四;
25、s32:若船舶不继续航行,则结束工作流程;
26、步骤四:判断当前工作模式;
27、s41:当q=q100%且p2=0时,进入模式一s1,若pb1+pb2>p1时,则进入步骤五;
28、s42:若pb1+pb2<p1时,则机械驱动模块进入低速档,并返回步骤二;
29、s43:当q≤q100%且0<p2≤p2l时,进入模式二s2,若p1<p2l时,则进入步骤六;
30、s44:当p1>p2时,若pb1+pb2+p2>p1时,则进入步骤五;
31、s45:若pb1+pb2+p2<p1时,则机械驱动模块进入高速档,返回步骤二;
32、s46:当q≤q100%且p2≥p2h时,进入模式三s3,若p2l<p1<p2h时,进入步骤六;
33、s47:若p1>p2h时,进入步骤五;
34、步骤五:锂电池组放电;
35、打开锂电池组与直流母线的开关,当锂电池组的电量q<ql时,断开开关,并返回步骤二;
36、步骤六:锂电池组充电;
37、s61:打开锂电池组与直流母线的开关,锂电池组进行恒压恒流充电;
38、s62:若当前电量q<q50%时,则锂电池组充电模式变为恒流充电,则机械驱动模块工作时发出的多余功率通过供电执行模块进行转化为恒流充电;
39、s63:若当前电量q>q50%时,则锂电池组充电模式变为恒压充电,则机械驱动模块工作时发出的多余功率会通过供电执行模块进行转化为恒压充电,直至q=q100%时,断开打开锂电池组与直流母线的开关,返回步骤二。
40、有益效果:与现有技术相比,本发明的优点是:
41、1、本发明提出一种双驱动拖轮电力推进系统,系统配置简单,成本低。不需要额外去设置多个柴油发动主机,用锂电池组代替多个柴油发动主机,环保性好。
42、在逆变组件dc/ac的控制下,推进电机可转换多种模式,包括推进电机作为纯电动机运行、推进电机作为发电机使用,协调柴油发电主机在多种工况下更好的满足船舶作业要求。
43、2、节约资源,柴油发动主机工作发出的多余能量并不会白白浪费,通过锂电池组进行储存,同时也能保护电路,避免因为电流过载导致线路短路;这时,推进电机发电量由功率控制系统(pms)全自动控制,pms系统采集转速信号、主机油门刻度信号、推进电机信号来控制发电量,为保证主机安全,pms系统会自动限制发电转速(主机怠速及低速不发电)、发电功率,保证系统稳定运行。
44、3、定义3种不同的工作模式,并开发智能调节方法,保障动力系统在不同的工作模式下,既能满足工作要求,又能满足柴油发动主机性能的保护。
45、4、提供终端控制器与主控制器间双冗余通讯模式,即终端控制器对各自执行模块下达控制指令前,能够对主控器命令进行必要的逻辑处理,保证指令的安全顺畅传输,提供系统运行的可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226161.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表