人工肌肉并联驱动的深海光学勘查水母机器人及勘查方法与流程
- 国知局
- 2024-08-01 07:06:17
本发明属于水下机器人领域,涉及一种人工肌肉并联驱动的深海光学勘查水母机器人及勘查方法,主要适用于深海多金属结核光学勘查。
背景技术:
1、太平洋深海盆地是全球海洋中多金属结核分布的主要区域,具有重要的海底多金属结核资源的调查价值。当前通常组织大型科考航次,携带深海机器人开展多金属结核调查。大型科考航次的成本巨大,深海机器人的调查时间往往受限于航次时间,海区气候,海面天气等。
2、公开号为cn107390530a的发明专利公开了一种基于记忆合金弹簧驱动的仿生水母设计与控制方法,通过控制记忆合金弹簧的伸长和收缩使仿生水母产生收缩和舒张运动。但形状记忆合金的控制过程依赖于温度控制,过热易损坏,易受深海低温海水影响,且耗能大驱动效率低,这就容易导致机器人的环境适应性较差,续航时间较短。
3、中国硕士学位论文全文数据库中,2023年公开的论文“基于液压软体驱动器的仿生水母机器人研究”中提到一种仿生水母机器人,该机器人采用一种柱形软体驱动器使水母驱动臂绕铰链旋转实现排水和吸水。但该柱形软体驱动器中心驱动的形式伸长量小,驱动力小,不足以带动较大负载。
4、公开号为cn116812120a的发明专利公开了一种仿生水母机器人,采用电机驱动凸轮,通过张拉结构传动连接,实现拨水运动。但电机驱动为刚性驱动,柔顺性差,且水母机器人本身的钟状体运动形态单一,不具备控制自身运动姿态的能力。
5、因此需要设计一种人工肌肉并联驱动的深海多金属结核光学勘查水母机器人来解决上述问题。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种人工肌肉并联驱动的深海光学勘查水母机器人及勘查方法,具有人工肌肉并联驱动仿生伞状体结构,可以控制水母机器人的水下姿态和运动。
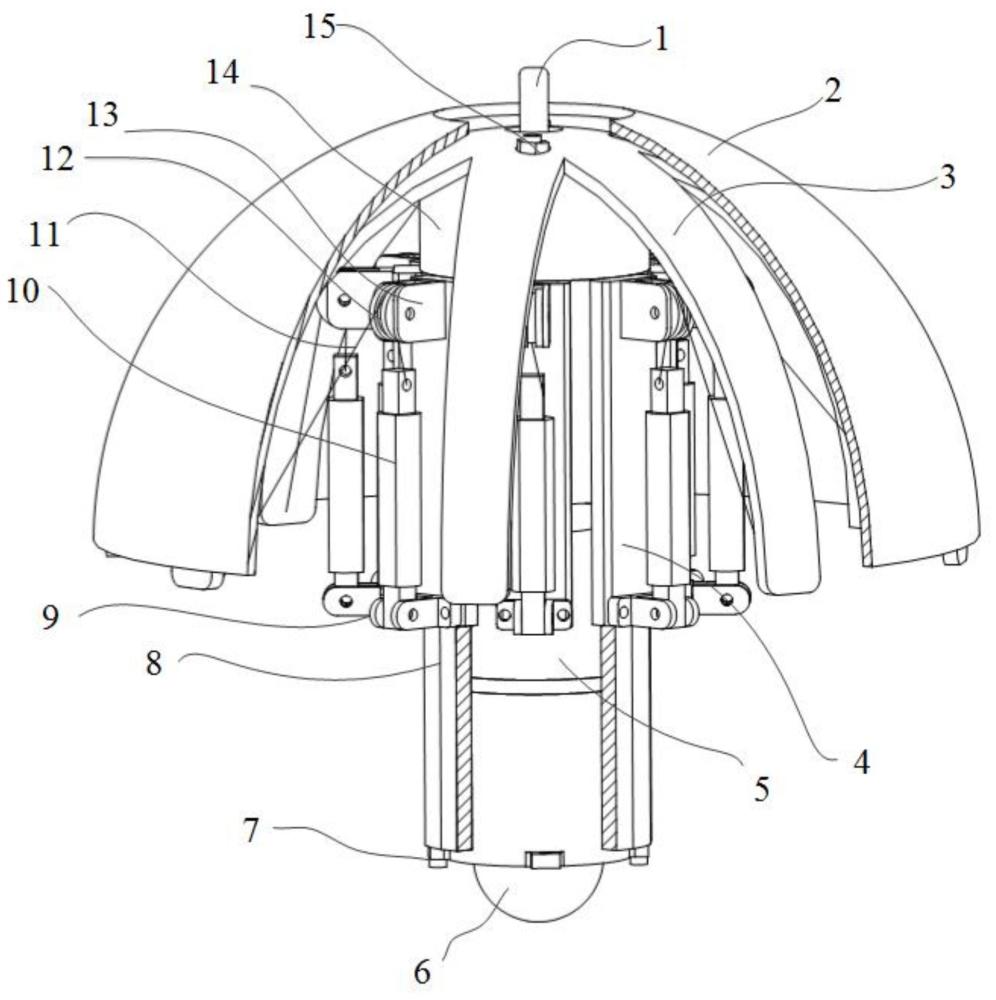
2、本发明的目的是通过以下技术方案来实现的:一种人工肌肉并联驱动的深海光学勘查水母机器人,该水母机器人包括卫星通讯模块、硅橡胶钟状体、伞状弹性基体板、驱动模块固定板、控制仓、自容式深海光学相机、桶身、人工肌肉、金属复合材料绳和弹性基体板固定杆;
3、所述伞状弹性基体板有若干条沿圆周均布的细长瓣形结构,硅橡胶钟状体和伞状弹性基体板构成水母机器人的仿生伞状体结构,通过弹性基体板固定杆与桶身机械连接;所述人工肌肉安装在驱动模块固定板上;驱动模块固定板固定在桶身上;人工肌肉通过金属复合材料绳与伞状弹性基体板的长瓣连接,人工肌肉并联控制伞状弹性基体板,通过人工肌肉的收缩幅度、频率来改变伞状体结构的喷水方向,改变水母的运动方向和水中姿态;卫星通讯模块、控制仓和自容式深海光学相机由上往下依次布置在水母机器人桶身中。
4、进一步地,人工肌肉并联控制伞状弹性基体板,通过金属复合材料绳带动伞状弹性基体板弯曲变形,改变伞状体结构体积,控制喷水与吸水阶段的动量差,实现水母的喷水推进运动。
5、进一步地,通过控制一侧人工肌肉以相同的频率和幅度收缩,控制仿生伞状体结构一侧形变,使得水母机器人朝着另一侧旋转,从而改变仿水水母机器人在水中的姿态。
6、进一步地,水母机器人还具有深海浮力材料,布置在水母机器人上端,提供浮力平衡水母机器人重力,使得水母机器人能够以平稳的姿态悬浮在深海。
7、进一步地,卫星通讯模块的天线露出水母机器人的仿生伞状体结构,自容式深海光学相机的光学镜头露出水母机器人铝合金桶身的下端。
8、进一步地,所述金属复合材料绳绕过滑轮一端与人工肌肉连接,另一端与伞状弹性基体板的一条长瓣连接,滑轮通过滑轮吊耳固定在驱动模块固定板上。
9、进一步地,人工肌肉铰接在人工肌肉固定吊耳上,所述人工肌肉固定吊耳固定在驱动模块固定板上。
10、进一步地,伞状弹性基体板的弯曲幅度与人工肌肉的收缩量正相关,伞状弹性基体板的弯曲速度与人工肌肉的收缩速率正相关,弯曲后能够靠弹性势能恢复原状。
11、进一步地,水母机器人能够深潜到海底多金属结核矿区,通过自容式深海光学相机拍摄多金属结核照片后,通过仿生伞状体结构喷水推进实现栅状线近海底观测轨迹,完成光学拍摄后,通过仿生伞状体结构喷水推进向上浮出海面,通过卫星通讯模块将相片数据传回地面卫星站。
12、另一方面,本发明还提供了一种基于水母机器人的深海光学勘查方法,该方法包括以下步骤:
13、(1)水母机器人浮出水面,通过卫星通讯模块将光学装配数据通过卫星传回卫星数据地面接收站;
14、(2)水母机器人通过控制人工肌肉的收缩幅度、频率调整自身姿态朝下,向海底运动;
15、(3)水母机器人到达目标海底离底高度后,通过控制人工肌肉的收缩幅度、频率调整自身姿态朝上;
16、(4)水母机器人开启自容式深海光学相机,按照预先设定栅状线进行走航式光学勘察,记录运动路径下的海底多金属结核照片;完成预设路线后,水母机器人上浮至水面,完成一次工作循环。
17、本发明的优点和积极效果为:
18、1. 水下推进噪声低:本发明设计的仿生水母结构,采用仿生伞状体喷水推进,推进噪声低于传统螺旋桨。
19、2. 水下调查扰动小:本发明采用仿生结构设计,水下运动也采用仿生方式,采用柔性仿生驱动形式,对原来生态环境的扰动小。
20、3. 自主性高:采用卫星传输数据,调查数据处理不依赖母船。
21、4. 水下姿态可控:采用八个人工肌肉并联驱动仿生伞状体,能够实时根据反馈控制水母机器人的运动姿态。
22、5. 可用于海底多金属结核资源量调查:桶体内集成了深海光学相机,可在多金属结核区进行走航式光学调查,上浮后通过卫星将照片传回地面卫星站。
技术特征:1.一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:该水母机器人包括卫星通讯模块、硅橡胶钟状体、伞状弹性基体板、驱动模块固定板、控制仓、自容式深海光学相机、桶身、人工肌肉、金属复合材料绳和弹性基体板固定杆;
2.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:人工肌肉并联控制伞状弹性基体板,通过金属复合材料绳带动伞状弹性基体板弯曲变形,改变伞状体结构体积,控制喷水与吸水阶段的动量差,实现水母的喷水推进运动。
3.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:通过控制一侧人工肌肉以相同的频率和幅度收缩,控制仿生伞状体结构一侧形变,使得水母机器人朝着另一侧旋转,从而改变仿水水母机器人在水中的姿态。
4.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:水母机器人还具有深海浮力材料,布置在水母机器人上端,提供浮力平衡水母机器人重力,使得水母机器人能够以平稳的姿态悬浮在深海。
5.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:卫星通讯模块的天线露出水母机器人的仿生伞状体结构,自容式深海光学相机的光学镜头露出水母机器人铝合金桶身的下端。
6.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:所述金属复合材料绳绕过滑轮一端与人工肌肉连接,另一端与伞状弹性基体板的一条长瓣连接,滑轮通过滑轮吊耳固定在驱动模块固定板上。
7.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:人工肌肉铰接在人工肌肉固定吊耳上,所述人工肌肉固定吊耳固定在驱动模块固定板上。
8.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:伞状弹性基体板的弯曲幅度与人工肌肉的收缩量正相关,伞状弹性基体板的弯曲速度与人工肌肉的收缩速率正相关,弯曲后能够靠弹性势能恢复原状。
9.根据权利要求1所述的一种人工肌肉并联驱动的深海光学勘查水母机器人,其特征在于:水母机器人能够深潜到海底多金属结核矿区,通过自容式深海光学相机拍摄多金属结核照片后,通过仿生伞状体结构喷水推进实现栅状线近海底观测轨迹,完成光学拍摄后,通过仿生伞状体结构喷水推进向上浮出海面,通过卫星通讯模块将相片数据传回地面卫星站。
10.一种基于权利要求1-9任一项所述水母机器人的深海光学勘查方法,其特征在于,该方法包括以下步骤:
技术总结本发明公开了一种人工肌肉并联驱动的深海光学勘查水母机器人及勘查方法,用于深海多金属结核资源量调查。该水母机器人采用弹性基体板和硅橡胶钟状体模拟水母的钟状体结构,采用人工肌肉驱动绳索实现水母机器人钟状体结构向内摆动模拟水母伞状体收缩,依靠弹性基体板自身弹性实现水母机器人钟状体结构向外摆动模拟水母伞状体伸展,如此循环水母机器人可以实现喷水推进。本发明采用八个人工肌肉并联驱动,模拟水母腔体内的肌肉纤维,通过控制特定的人工肌肉驱动,控制钟状体结构的摆动状态,可以控制水母机器人喷水推进的运动方向。本发明通过控制吸水和喷水阶段的动量差,可以控制水母机器人的运动速度。技术研发人员:陈宁特,韩沉花,周建平,陶春辉,郑旻辉受保护的技术使用者:自然资源部第二海洋研究所技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240722/226152.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表