融合改进蜣螂算法与人工势场法的机器人路径规划方法
- 国知局
- 2024-08-01 00:23:00
本发明属于机器人,具体涉及一种融合改进蜣螂算法与人工势场法的机器人路径规划方法。
背景技术:
1、路径规划是机器人技术领域中必不可少的关键技术之一,它通过算法寻找带有静态障碍物的环境中从起点到终点的最佳路径。许多学者根据所使用的场景,在原大量路径规划算法上改进出更加适应某场景的路径规划算法。这些算法在效率、实时性、鲁棒性等方面都有不同的优缺点,需根据具体场景和机器人形态选择所需算法,再进行改进。
2、群智能仿生类算法是一种模拟社会性动物各种群体行为的算法,它的核心在于利用群体中的个体进行信息交互和协同来完成寻找最优解的目的。广泛应用于智能交通、通信网络、数据分析、工业和军事国防等领域。与传统路径规划算法相比,群智能仿生类算法具有很多优点。比如说收敛速度快、精度高、易操作、具有较好的鲁棒性和适应性、可以解决多目标函数问题等,在多维、复杂场景中能更简单、更有效地找到全局最优解。群智能仿生类算法包括蚁群算法、萤火虫算法、粒子群算法、灰狼算法、蜣螂算法等。
3、蜣螂算法(dbo)是是一种新的群智能优化算法,在2022年由东华大学的沈波教授团队提出,灵感源自蜣螂的生物行为。它是通过模拟蜣螂的滚球、繁殖、觅食和偷窃四种行为进行位置更新和优化。总的来说dbo算法具有收敛速度快、求解精度高等优点,但存在全局规划和局部开发能力不平衡及动态避障能力差等问题。
4、蜣螂算法应用于简单场景中能获得较好地路线,但在稍微复杂环境中,比如说有多张餐桌椅的复杂环境,运用蜣螂算法进行路径规划,会存在较多无意义的节点,路径质量较差,不利于机器人移动。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的融合改进蜣螂算法与人工势场法的机器人路径规划方法解决了采用单一蜣螂算法或人工势场法进行路径规划时存在的易避障失败,及嵌入局部最小的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:融合改进蜣螂算法与人工势场法的机器人路径规划方法,包括以下步骤:
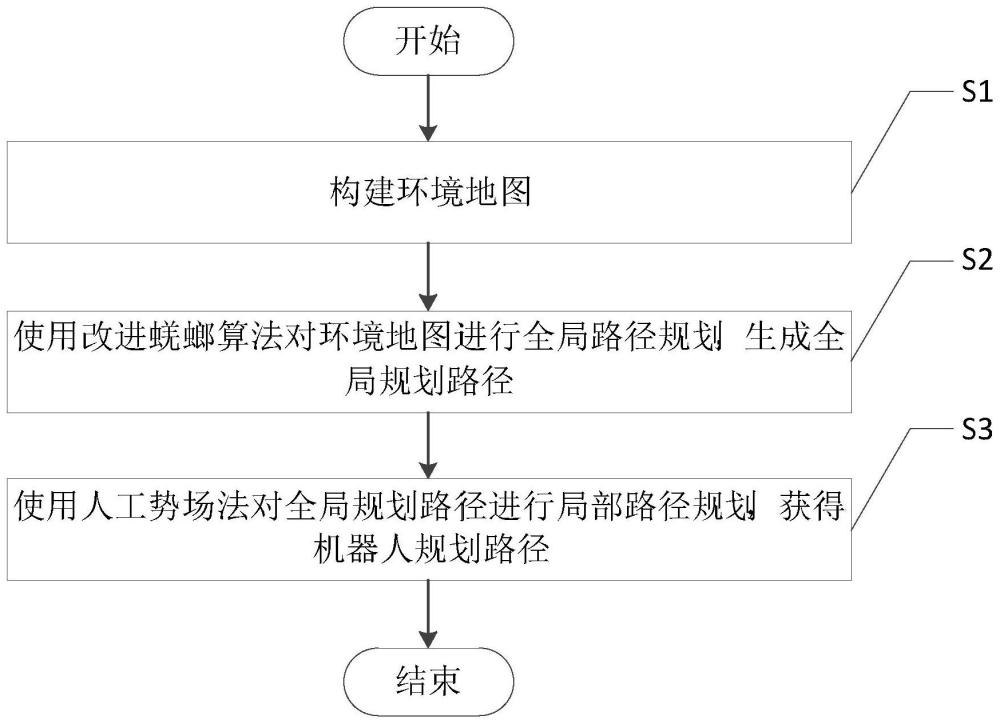
3、s1、构建环境地图;
4、s2、使用改进蜣螂算法对环境地图进行全局路径规划,生成全局规划路径;
5、s3、使用人工势场法对全局规划路径进行局部路径规划,获得机器人规划路径。
6、进一步地,所述步骤s1中,利用栅格法建立环境地图,所述环境地图中标记有静态障碍物、动态障碍物、可行区域,以及为机器人设置的起点和终点。
7、进一步地,所述步骤s2具体为:
8、s21、初始化蜣螂算法参数,包括最大迭代次数、种群数量、滚球蜣螂比例、孵球蜣螂比例、觅食蜣螂比例、小偷蜣螂比例以及障碍物的初始位置;
9、s22、使用tent混沌映射初始化种群;
10、s23、计算初始化的种群中每只蜣螂的适应度值,定义全局最优适应度及其位置、全局最差适应度及其位置、并按比例顺序挑选滚球蜣螂、孵球蜣螂、觅食蜣螂及小偷蜣螂;
11、s24、设置当前迭代次数t=0;
12、s25、执行蜣螂算法,对计算的适应度值进行排序,找出适应度最优的蜣螂个体,依次确定各蜣螂个体的类型并进行位置更新;
13、s26、判断是否达到最大迭代次数;
14、若是,则得到初始全局规划路径,进入步骤s27;
15、若否,则返回步骤s25;
16、s27、对初始全局规划路径进行优化,得到全局规划路径。
17、进一步地,所述步骤s22具体为:
18、s22-1、将蜣螂个体位于d维解空间的位置映射到混沌空间[0,1]中;
19、s22-2、在混沌空间[0,1]中,根据tent混沌映射的数学模型计算蜣螂个体的各位置坐标(x,y);
20、s22-3、根据tent混沌映射产生的混沌变量在种群中进行搜索,并得到新的蜣螂个体;
21、s22-3、将新的蜣螂个体还原到d维解空间中,完成种群初始化。
22、进一步地,所述步骤s22-2中,tent混沌映射的数学模型为:
23、
24、式中,xn+1为第n+1次的函数映射值,f(·)表示映射函数,γ为(0,1)之间的控制参数。
25、进一步地,所述步骤s25具体为:
26、s25-1、设置参数θ∈(0,1);
27、s25-2、对n只蜣螂按比例进行滚球、孵球、觅食及小偷行为;
28、s25-3、对于滚球行为,判断蜣螂在进行滚球行为时,参数θ<0.9是否成立;
29、若是,则选择无障碍物时,对滚球蜣螂进行位置更新;
30、若否,则选择有障碍物时,对滚球蜣螂进行位置更新;
31、s25-4、对于孵球行为,通过定义蜣螂的繁殖区域,更新为孵球蜣螂的位置;
32、s25-5、对于觅食行为,通过建立最优觅食区域引导蜣螂觅食,进而更新觅食蜣螂位置;
33、s25-6、对于小偷行为,通过确定其偷粪球位置,更新小偷蜣螂的位置;
34、s25-7、基于各蜣螂的滚球、孵球、觅食和小偷行为,更新其适应度值,并选择最优适应度值;
35、s25-8、基于最优适应度值,更新个体最优值和全局最优值,并生成规划路径。
36、进一步地,所述步骤s25-3中,无障碍物时,滚球蜣螂的位置更新公式为:
37、xi(t+1)=xi(t)+α×k×xi(i-1)+b×δx
38、δx=|xi(t)-xw|
39、式中,t表示当前迭代次数,xi(t)表示第i只蜣螂在第t次迭代时的位置信息,k∈(0,0.2],表示偏差系数的常数,b∈(0,1)的一个常量值,α是赋值-1或1的自然系数,xw示全局最差位置,δx用于模拟光强的变化;
40、有障碍物时,滚球蜣螂的位置更新公式为:
41、xi(t+1)=xi(t)+tan(θ)|xi(t)-xi(t-1)|
42、其中,θ∈[0,π],当θ=0、2/π、π,蜣螂的位置不更新;
43、所述步骤s25-4中,孵球蜣螂的位置更新公式为:
44、bi(t+1)=x*+b1×(bi(t)-lb*)+b2×(bi(t)-ub*)
45、式中,bi(t)为第i个育雏球在第n次迭代时位置信息,b1和b2表示大小1*d的两个独立随机变量,d表示优化问题的维数,lb*和ub*分别表示繁殖区域的上界和下界;
46、所述步骤s25-5中,觅食蜣螂的位置更新公式为:
47、xi(t+1)=xi(t)+c1×(xi(t)-lbb)+c2×(xi(t)-ubb)
48、式中,xi(t)示第i只小蜣螂在第n次迭代时的位置信息,c1表示服从正态分布的随机数,c2表示属于(0,1)的随机向量,lbb和ubb分别表示最优觅食区域的上界和下界;
49、所述步骤s26-6中,小偷蜣螂的位置更新公式为:
50、xi(t+1)=xb+s×g×(|xi(t)-x*|+|xi(t)-xb|)
51、是在,xi(t)表示第i个小偷在第t次迭代时的位置信息,g是服从正态分布的1*d随机向量,s表示一个常数;
52、所述步骤s26-7中,最优适应度值fitness的表达式为:
53、
54、式中,(xi,yi)表示路径节点坐标,i=1,2...n。
55、进一步地,所述步骤s27中,对初始全局规划路径进行优化的方法具体为:
56、s27-1、按顺序提取初始全局规划路径中的路径关键点;
57、s27-2、将各路径关键点作为节点,连接节点及其紧挨节点的后续节点形成局部路径,并判断该局部路径是否经过障碍物;
58、其中,将节点的紧挨节点作为中间节点;
59、若是,则不删除中间节点,前后节点的关系不发生变化,进入步骤s27-3;
60、若否,则保留局部路径,删除中间节点,并更新前后节点关系,进入步骤s27-3;
61、s27-3、基于更新后的节点前后关系,更新初始全局规划路径,得到全局规划路径。
62、进一步地,所述步骤s3具体为:
63、s31、对全局规划路径进行平滑处理并提取局部路径点;其中,局部路径点包括起点和终点;
64、s32、在全局规划路径中,将当前路径点其对应的下一路径点作为临时目标点;
65、s33、判断机器人当前所在位置是否在障碍物影响范围内;
66、若否,则进入步骤s34;
67、若是,则进入步骤s35;
68、s34、使机器人沿路径向临时目标点运动,并返回步骤s33;
69、s35、判断机器人的速度与动态障碍物的速度之间的夹角是否在(0,180)区间内;
70、若是,则进入步骤s36;
71、若否,则进入步骤s37;
72、s36、在机器人移动过程中加入改进斥力势场,并沿路径向临时目标点运动,进入步骤s38;
73、s37、在机器人运动过程中加入传统斥力势场,并沿路径向临时目标点运动,进入步骤s38;
74、s38、判断机器人是否达临时目标点;
75、若是,则进入步骤s39;
76、若否,则返回步骤s33;
77、s39、判断当前临时目标点是否为终点;
78、若是,则完成局部路径规划,获得机器人规划路径;
79、若否,则返回步骤s32。
80、进一步地,所述步骤s36中,改进斥力势场的表达式为:
81、
82、所述步骤s37中,传统斥力势场的表达式为:
83、
84、式中,fre为机器人收到的斥力,k为斥力场常量,r为机器人与障碍物之间的距离,po为加入传统斥力势场时障碍物的影响距离;
85、p为加入改进斥力势场时障碍物的影响距离,a为相对速度斥力常量,v为机器人相对于障碍物的运动速度,θ为机器人速度和障碍物速度夹角。
86、本发明的有益效果为:
87、(1)全局搜索能力:蜣螂算法是一种群智能仿生优化算法,其灵感来源于蜣螂的生物行为过程。蜣螂的行为滚球、繁殖、觅食和偷窃分别对应着算法中的滚球蜣螂、孵球蜣螂、小蜣螂和小偷蜣螂,这四种蜣螂按照各自的规则进行位置更新,并进行全局搜索。蜣螂算法具有较强的全局搜索能力,具有收敛速度快、求解精度高的优点,可以帮助机器人在多维或复杂二维环境中找到全局最优解。
88、(2)局部优化:人工势场法(apf)是一种经典的机器人路径规划算法,它是将机器人在环境中的运动,抽象成引力场中的运动,目标点对机器人产生吸引力,障碍物对机器人产生排斥力,最后通过求机器人所受到的合力来控制其运动。人工势场法只需要根据周围环境和当前状态来确定接下来的运动方向,也就是说,通过当前机器人所受合力,来确定下一步的运动方向,从而生成适应性较强的局部路径,它具有计算快、路径平滑等优点。
89、(3)种群多样性优化:原始蜣螂算法存在初始种群分布不均匀,种群多样性较低的问题,因此采用混沌映射进行蜣螂种群初始化。在初始化种群过程中,混沌变量取代了智能算法中的随机变量,因此混沌映射的搜索范围比随机搜索策略的范围更大,可以用于提高种群多样性,加快收敛速度。
90、(4)路径优化:借助了贪心算法的思想,减少了生成路径中的无意义节点,降低了机器人地转弯次数,提高了机器人的平稳度及路径质量。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200858.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表