一种分段融合的路径规划方法、装置、存储介质及产品
- 国知局
- 2024-08-01 00:13:53
本发明涉及路径规划,尤其涉及路径规划算法的分段融合。
背景技术:
1、连接起点和终点的序列点或曲线称之为路径,构成路径的策略称之为路径规划。路径规划广泛应用于机器人导航、自动驾驶以及交通控制等领域。
2、现有的路径规划技术大致可以分为两类:全局路径规划和局部路径规划。全局路径规划是在已知的环境地图中寻找一条从起始点到目标点的最优路径;而局部路径规划则是在机器人运行过程中,当遇到未知障碍物时,重新定义局部路径,绕过障碍物向目标点前进,生成一种相对最优的可控行驶的局部路径。
3、传统的路径规划算法如a*算法和dijkstra算法,在处理静态环境下的路径规划问题时表现良好的性能;但在动态变化的环境下,这些算法的路径规划效果往往受到限制。
4、为解决传统的路径规划算法的上述问题,本领域的技术人员提出了多种局部规划算法,如动态窗口法(dwa)、模型预测控制(mpc)等。
5、这些局部规划算法能够根据环境的动态变化对局部路径进行实时规划;然而,对于同一路径不同路段上存在不同密度障碍物的环境,这些局部规划算法往往表现出一定的局限性;主要原因是一种局部规划算法往往适用于某一种障碍物密度的环境,强行将一种局部规划算法应用于一条路径不同路段上存在不同密度障碍物的环境,会导致算法运算量过大,进而出现运算实时性差、硬件性能不足等问题。
技术实现思路
1、本发明提出了一种分段融合的路径规划方法、装置、存储介质及产品,解决了现有路径规划算法难以应对一条路径不同路段上存在不同密度障碍物环境的问题。
2、本发明所述的一种分段融合的路径规划方法,其技术方案如下:
3、所述方法包括以下步骤:
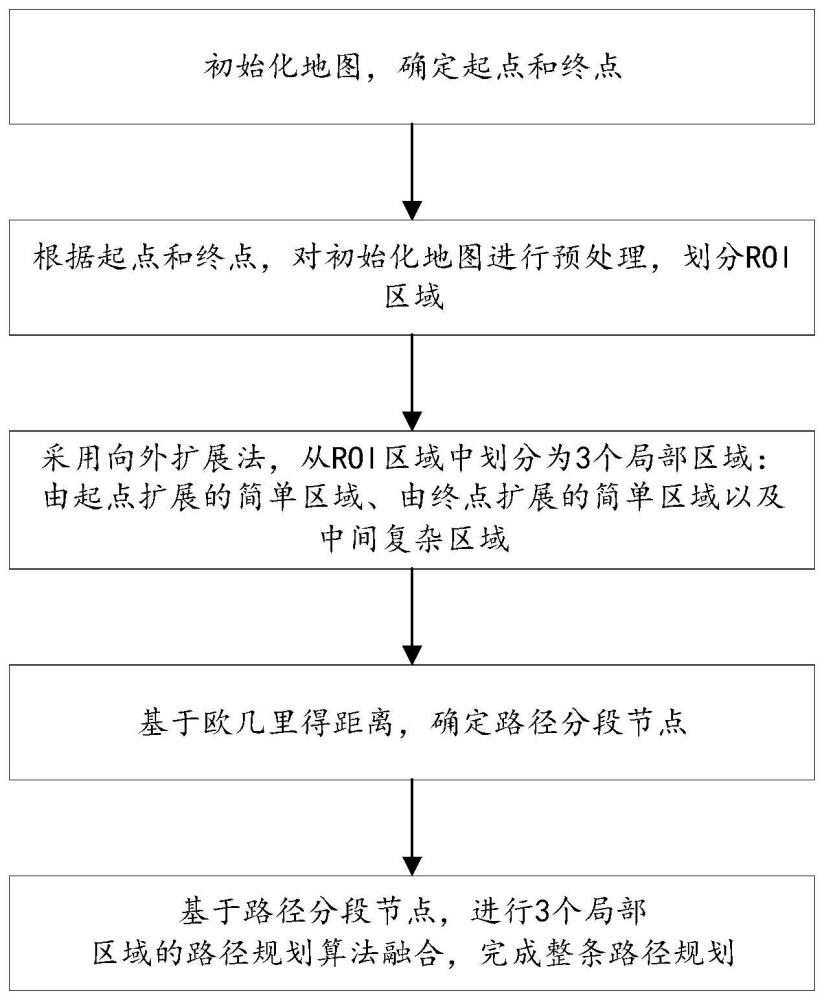
4、初始化地图,确定起点和终点的步骤;
5、根据起点和终点,对初始化地图进行预处理,划分出roi区域的步骤;
6、采用向外扩展法,从roi区域中划分出由起点扩展的简单区域和由终点扩展的简单区域,将roi区域中剩余的区域作为中间复杂区域的步骤;
7、基于欧几里得距离,确定由起点扩展的简单区域的路径分段节点以及由终点扩展的简单区域的路径分段节点的步骤;
8、基于路径分段节点,进行由起点扩展的简单区域、由终点扩展的简单区域以及中间复杂区域的路径规划算法融合,完成整条路径规划的步骤。
9、进一步的,提供一个优选实施方式,所述初始化地图,确定起点和终点的步骤包括:
10、创建一个表示实际环境的栅格地图,所述栅格地图为若干个方格按行列方向均匀排布形成的二维矩阵;其中,每一个方格作为一个节点,第i行第j列的节点为nij;
11、遍历所述栅格地图,为每一个节点赋值,获得节点集合{nij};其中,对于{nij}中任意一个节点:
12、若该节点所表示的方格所处区域内无障碍物,则所述任意一个节点赋值为0;
13、否则,所述任意一个节点赋值为1;
14、经上述步骤,完成初始化地图;
15、根据给定的路径规划要求,在初始化后的地图上指定起点和终点。
16、进一步的,提供一个优选实施方式,所述根据起点和终点,对初始化地图进行预处理,划分出roi区域的步骤包括:
17、在初始化后的地图中,将起点和终点作为对角点,将起点和终点的连线作为对角线;
18、根据所述对角点和对角线,划分出一个矩形,以矩形内部作为地图的roi区域。
19、进一步的,提供一个优选实施方式,所述采用向外扩展法,从roi区域中划分出由起点扩展的简单区域包括:
20、创建3个空的节点集合,一个父节点集合、一个拓展区域节点集合和一个简单区域节点集合;
21、遍历roi区域,获得roi区域内所有节点组成的集合{gab};
22、将起点作为种子节点加入父节点集合;
23、采用迭代算法,获得由起点扩展的简单区域;其中任意一次迭代过程如下:
24、将父节点集合中的每一个节点作为父节点,向外扩展相邻8个子节点;对向外扩展的全部子节点进行不重复处理,随后导入拓展区域节点集合;
25、将父节点集合中的所有父节点导入简单区域节点集合,随后清空父节点集合;
26、将拓展区域节点集合中属于集合{gab}但不属于简单区域节点集合的节点全部导入父节点集合中,同时将拓展区域节点集合清空;
27、遍历简单区域节点集合,获取其中赋值为1的节点占总数量的比值:
28、如果赋值为1的节点占总数量的比值不小于20%,则迭代过程结束,获得的简单区域节点集合为由起点扩展的简单区域;
29、否则,进行下一次迭代过程。
30、进一步的,提供一个优选实施方式,所述将roi区域中剩余的区域作为中间复杂区域的步骤为:
31、设由起点扩展的简单区域的所有节点组成的集合为{sab},由终点扩展的简单区域的所有节点组成的集合为{eab};
32、则中间复杂区域的所有节点组成的集合为:{gab}-({sab}∪{eab}。
33、进一步的,提供一个优选实施方式,所述基于欧几里得距离,确定由起点扩展的简单区域的路径分段节点以及由终点扩展的简单区域的路径分段节点的步骤包括:
34、获得由起点扩展的简单区域的边缘非障碍物节点集合以及由终点扩展的简单区域的边缘非障碍物节点集合;
35、在上述两个边缘非障碍物节点集合中分别任意选择一个节点组成一对节点对,获取所述节点对的欧几里得距离:
36、
37、其中,(x1,y1),(x2,y2)分别表示两个节点的坐标位置;
38、遍历上述两个边缘非障碍物节点集合的所有节点对,获得欧几里得距离最短的一对或多对节点对;
39、遍历所述欧几里得距离最短的一对或多对节点对中的所有节点,将距离起点最短的节点作为由起点扩展的简单区域的路径分段节点,将距离终点最短的节点作为由终点扩展的简单区域的路径分段节点。
40、进一步的,提供一个优选实施方式,所述基于路径分段节点,进行由起点扩展的简单区域、由终点扩展的简单区域以及中间复杂区域的路径规划算法融合,完成整条路径规划的步骤包括:
41、采用bi-directional算法,同时扩展起点到由起点扩展的简单区域的路径分段节点和终点到由终点扩展的简单区域的路径分段节点,通过欧几里得距离获取当前点到目标点的评估成本,获取简单区域的最优路径;
42、获取由起点扩展的简单区域的路径分段节点和由终点扩展的简单区域的路径分段节点之间的欧几里得距离:
43、若所述欧几里得距离为0,则所述简单区域的最优路径为整条路径的最优路径,方法结束;
44、否则,采用a*+dwa算法,确保在速度空间(v,w)中动态探索由起点扩展的简单区域的路径分段节点到由终点扩展的简单区域的路径分段节点之间的路段,获得复杂路段的最优路径;将简单区域的最优路径和复杂路段的最优路径结合作为整条路径的最优路径;其中,所述速度空间表示为速度定义区间和角度定义区间;方法结束。
45、本发明还提出了一种分段融合的路径规划装置,其技术方案如下:
46、所述装置用于实现上述一种分段融合的路径规划方法;所述装置包括以下模块:
47、初始化地图,确定起点和终点的模块;
48、根据起点和终点,对初始化地图进行预处理,划分出roi区域的模块;
49、采用向外扩展法,从roi区域中划分出由起点扩展的简单区域和由终点扩展的简单区域,将roi区域中剩余的区域作为中间复杂区域的模块;
50、基于欧几里得距离,确定由起点扩展的简单区域的路径分段节点以及由终点扩展的简单区域的路径分段节点的模块;
51、基于路径分段节点,进行由起点扩展的简单区域、由终点扩展的简单区域以及中间复杂区域的路径规划算法融合,完成整条路径规划的模块。
52、本发明还提出了一种计算机程序产品,其技术方案如下:
53、一种计算机程序产品,包括:处理器和存储器,所述存储器用于存储所述处理器的可执行指令,所述处理器配置为经由执行所述可执行指令来执行上述的一种分段融合的路径规划方法。
54、本发明还提出了一种计算机存储介质,其技术方案如下:
55、一种计算机存储介质,所述存储介质中存储有计算机程序,所述计算机程序运行时,执行上述的一种分段融合的路径规划方法。
56、本发明有以下有益效果:
57、本发明所述的一种分段融合的路径规划方法,通过在一条路径中将不同障碍物密度的路段分割,根据每个路段所处环境的障碍物密度,融合合适的路径规划算法,解决了现有路径规划算法难以应对一条路径不同路段上存在不同密度障碍物环境的问题,减轻了繁琐的路径规划算法对硬件带来的性能压力,提高算法了的实时性和对硬件的适用度。
58、本发明所述的一种分段融合的路径规划方法、装置、存储介质及产品,适用于在一条路径不同路段上存在不同密度障碍物的环境中进行路径规划。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200124.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。