一种水面清洁机器人的制作方法
- 国知局
- 2024-08-01 07:07:11
本发明涉及清洁机器人,特别涉及一种适用于清理泳池等水面场景下的水面清洁机器人。
背景技术:
1、目前,市面上的水面清洁机器人只能清洁水面表面的垃圾,而对于靠边位置处以及水线墙面位置处的垃圾没有清理效果,从而容易造成清理死角。
2、在现有技术中,水面清洁机器人通常由机器人本体、壳体组件、垃圾回收篓、行走组件等组成;而垃圾回收篓通常设置有垃圾进入口,以使垃圾可以从该垃圾进入口进入垃圾回收篓内,从而实现垃圾的回收功能。
3、传统的水面清洁机器人不能回收悬浮在上述垃圾进入口之下的垃圾,从而造成清理效果较差的问题。
技术实现思路
1、本发明提供的水面清洁机器人,旨在解决现有水面清洁机器人的至少一个缺陷。
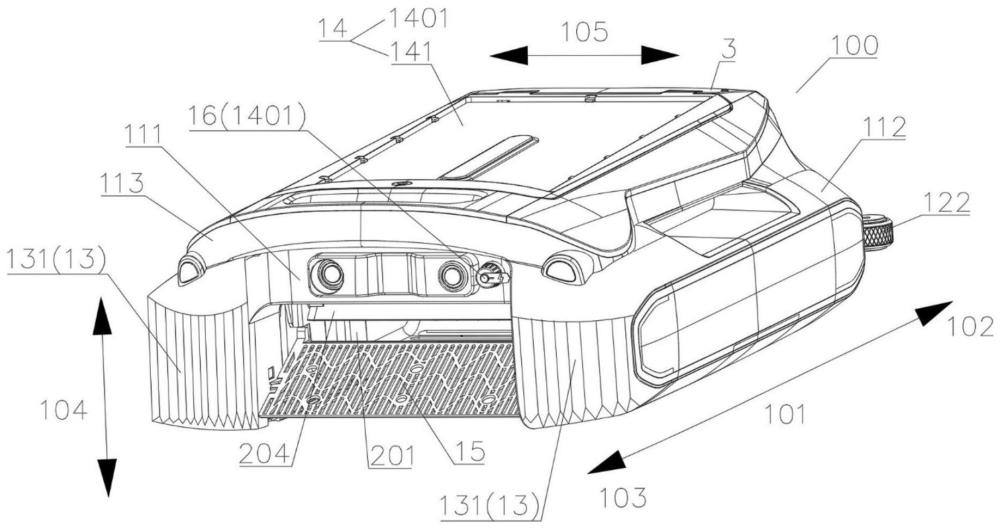
2、本发明提供了一种水面清洁机器人。所述水面清洁机器人包括:机器人本体、可拆卸地固定在所述机器人本体内部的垃圾回收篓以及可相对于所述机器人本体转动的翻盖组件;所述垃圾回收篓在第一方向上的一端开设有垃圾进入口;所述机器人本体包括:
3、壳体组件;所述壳体组件在所述第一方向上具有相互背离的第一侧和第二侧;
4、行走组件;所述行走组件设置在所述壳体组件的第一侧;
5、边刷组件;所述边刷组件装配在所述壳体组件的第二侧;
6、动力组件;所述动力组件的至少一部分设置在所述壳体组件上,用于提供驱动所述行走组件运动的动力源;
7、铲斗;所述铲斗的其中一端衔接于所述垃圾回收篓,且与所述垃圾进入口的底端相平齐;所述铲斗的另一端朝接近所述第一侧的方向延伸,且低于所述垃圾进入口的底端。
8、在一些实施例中,所述垃圾回收篓为顶部具有敞口的腔体结构;所述垃圾进入口自所述敞口,沿第二方向朝接近所述垃圾回收篓底部的方向延伸;
9、其中,所述第二方向和所述第一方向相互正交;所述翻盖组件用于局部覆盖或全面覆盖所述垃圾回收篓的敞口。
10、在一些实施例中,所述垃圾回收篓在所述第一方向上具有相互背离的第一端和第二端;所述垃圾进入口开设在所述第一端;
11、所述垃圾回收篓在所述敞口处设置有封闭板;所述封闭板的其中一端连接至所述垃圾回收篓的第二端;所述封闭板的另一端朝接近所述第一端的方向延伸,且与所述第一端具有预设间距。
12、在一些实施例中,所述壳体组件包括:
13、基座;所述基座内部开设有在所述第二方向上相互连通的容纳腔;
14、其中,所述垃圾回收篓可拆卸地被收容在所述容纳腔内,且用于盛装垃圾;所述翻盖组件转动连接于所述基座,且接近所述第一侧;
15、设置在所述基座上的第一壳体和第二壳体;所述行走组件的其中一部分设置在所述第一壳体上,另外一部分设置在所述基座上;所述边刷组件设置在所述第二壳体上。
16、在一些实施例中,所述垃圾回收篓在所述敞口处设置有一个可带动垃圾进入所述腔体结构内的滚刷部件;
17、所述滚刷部件位于所述垃圾回收篓的所述垃圾进入口所在的一端,且沿第三方向延伸;
18、所述滚刷部件上装配有长条状叶片或毛刷;所述长条状叶片的上边缘高于所述垃圾进入口的顶端;所述长条状叶片的下边缘高于所述垃圾进入口的底端;
19、其中,所述第三方向分别与所述第一方向和所述第二方向相互正交。
20、在一些实施例中,所述边刷组件包括:
21、沿所述第二方向延伸的至少一个边刷滚筒,连接于所述第二壳体的外侧边缘,用于将所述机器人本体外侧的垃圾聚拢至所述垃圾回收篓的垃圾进入口处,并通过所述滚刷部件将垃圾收集至所述垃圾回收篓内。
22、在一些实施例中,所述边刷滚筒的其中一部分可淹没在水面之下,另一部分可露出水面,可将水线位置处的垃圾聚拢至所述垃圾进入口处,并通过所述滚刷部件将垃圾收集至所述垃圾回收篓内。
23、在一些实施例中,所述铲斗的一端与所述垃圾进入口的底端相平齐,另一端低于所述垃圾进入口的底端,以使所述铲斗以预设角度倾斜于所述垃圾进入口,可将悬浮在所述垃圾进入口底端之下的垃圾聚拢至所述垃圾进入口处,并通过所述滚刷部件将垃圾收集至所述垃圾回收篓内;
24、其中,所述预设角度为所述铲斗的表面与所述第一方向之间的夹角。
25、在一些实施例中,所述行走组件包括:
26、一对涡轮,固定于所述基座上,并且沿第三方向相对设置;所述涡轮用于推动所述机器人本体运动;
27、一对导向轮部件,分别装配于所述第一壳体在所述第三方向上相对的两个外边缘;
28、一对防护框体,分别设置在一对所述涡轮的相应位置处;所述防护框体内部形成防护空间,可将所述涡轮收容在所述防护空间内;
29、其中,所述第三方向分别与所述第一方向和所述第二方向相互正交。
30、在一些实施例中,所述动力组件包括:
31、太阳能板;所述太阳能板设置在所述翻盖组件上;
32、具有type-c充电接口的充电模块;所述充电模块设置在所述壳体组件的基座上;
33、电路板,用于控制所述行走组件的一对涡轮转动;所述电路板设置在所述基座上,且分别与所述太阳能板和所述充电模块之间形成电性连接;
34、蓄电池,用于提供动力源至一对所述涡轮;所述蓄电池设置在所述基座上,并且与所述电路板形成电性连接。
35、在一些实施例中,所述水面清洁机器人还包括:
36、充电口盖体;所充电口盖体设置在所述基座上,且所充电口盖体的设置位置和所述type-c充电接口的开设位置相对应,以使所述充电口盖体可在打开状态和关闭状态之间切换;
37、其中,所述关闭状态为所述充电口盖体插入至所述type-c充电接口的预设位置;所述打开状态为所述充电口盖体脱离所述type-c充电接口,或者是所述充电口盖体已插入type-c充电接口内,但并未插入至所述预设位置。
38、在一些实施例中,所述水面清洁机器人还包括:
39、第一感应件;所述第一感应件固定在所述type-c充电接口内,并位于所述预设位置处;
40、第二感应件;所述第二感应件装配在所述充电口盖体上,且所述第二感应件的装配位置和所述第一感应件的固定位置相对应;
41、其中,在所述充电口盖体处于所述关闭状态时,所述第一感应件和所述第二感应件在所述预设位置处相互配合,以形成第一提示信息;
42、其中,在所述充电口盖体处于所述打开状态时,所述第二感应件远离所述预设位置,以形成第二提示信息。
43、在一些实施例中,当所述第一提示信息传递至所述电路板上时,所述电路板输出控制所述涡轮转动的启动信号;
44、当所述第二提示信息传递至所述电路板上时,所述电路板输出断电信号以及提示用户具有进水风险。
45、本发明实施例所提供的水面清洁机器人的至少一个有益效果是:提出一种新型的水面清洁机器人,通过加入边刷组件和铲斗的结构,在保证水面清洁效果的前提下,可以有效清理靠边位置处、水线位置处等死角位置的垃圾,还可以清理悬浮在垃圾进入口之下的垃圾,从而提高本水面清洁机器人回收垃圾的清理效果。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226231.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表