一种水下清洁机器人驱动器的制作方法
- 国知局
- 2024-08-01 07:08:45
本技术涉及水下清洁机器人,具体为一种水下清洁机器人驱动器。
背景技术:
1、水下清洁机器人是一款应用于水下清理如落叶、泥土等垃圾的清洁设备,驱动器是水下清洁机器的动力来源。
2、目前水下清洁机器人常采用轮式系统,此系统结构比较复杂、难以控制、成本较高且采用轮式时,往往会有清洁不到位的地方,针对上述问题,需要对现有的设备进行改进。
技术实现思路
1、本实用新型的目的在于提供一种水下清洁机器人驱动器,以解决上述背景技术中提出的目前水下清洁机器人常采用轮式系统,此系统结构比较复杂、难以控制、成本较高且采用轮式时,往往会有清洁不到位的地方的问题。
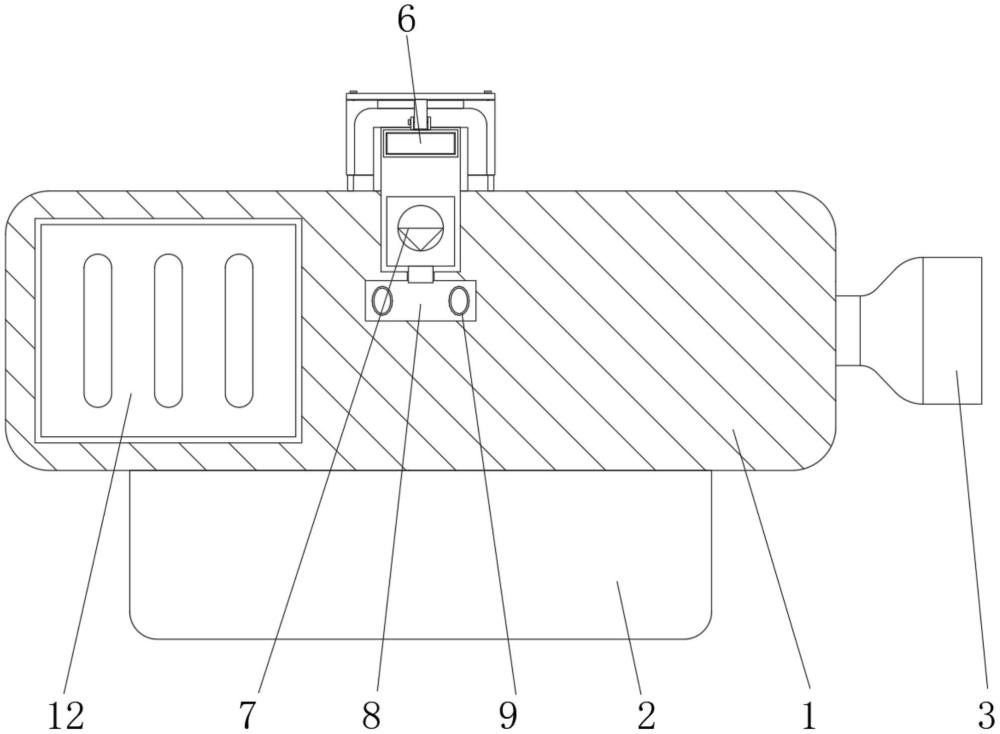
2、本实用新型提供的一种水下清洁机器人驱动器,包括驱动器主体,所述驱动器主体的底部固定有清洁储藏仓,所述驱动器主体的一侧固定有动力涡扇,所述驱动器主体底部两侧对称转动连接有波轮扇。
3、所述驱动器主体的顶部固定有防潮除湿机构,所述驱动器主体的顶部内固定有气泵,所述气泵的底部与排气通道相连接,所述排气通道开设在驱动器主体的内部,所述驱动器主体的两侧对称开设有分支通道,所述分支通道与排气通道相贯通,所述分支通道内固定有排气阀和止逆阀。
4、优选的,所述驱动器主体底部内的两侧对称固定有马达,且马达的底部与波轮扇相连接。
5、优选的,所述防潮除湿机构包括支撑柱,且支撑柱固定在驱动器主体的顶部,所述支撑柱的顶部固定有挡罩,且挡罩的顶部开设有通孔。
6、优选的,所述挡罩的顶部通过第一螺栓固定有顶盖,且顶盖贯穿通孔,所述顶盖的底部通过第二螺栓固定有网盒,且网盒内放置有干燥剂块,所述驱动器主体的顶部固定有进气通道,所述网盒伸入进气通道内。
7、优选的,所述分支通道设置有四个,且四个分支通道关于驱动器主体的竖直中轴线对称设置。
8、优选的,所述驱动器主体内固定有电池组,且电池组电性连接有动力涡扇、马达、波轮扇、气泵和排气阀。
9、本实用新型的技术手段可获得的技术效果为:
10、1、该水下清洁机器人驱动器,通过设置的动力涡扇、波轮扇、分支通道和排气阀的相互配合使用,能够达到动力稳定和灵活调向的目的,动力涡扇可为该装置提供动力,动力涡扇的设置可以降低成本、提高系统稳定性,且可以模块化设计,降低生产和维修成本,分支通道设置有四个,且每个分支通道内均设置有一个排气阀,通过控制打开不同的分支通道排气可控制该装置的运动方向,通过调节两侧波轮扇的速度也可控制该装置的运动方向,该装置丰富了水下清洁机器人的动力系统选择,适合不同场景,优化生产以及维护工序。
11、2、该水下清洁机器人驱动器,通过设置的干燥剂块、进气通道和气泵的相互配合使用,能够达到防潮除湿的目的,外部空气进入进气通道内之后,干燥剂块可对空气进行干燥除湿处理,避免水汽进入气泵内。
技术特征:1.一种水下清洁机器人驱动器,包括驱动器主体(1),其特征在于:所述驱动器主体(1)的底部固定有清洁储藏仓(2),所述驱动器主体(1)的一侧固定有动力涡扇(3),所述驱动器主体(1)底部两侧对称转动连接有波轮扇(5);
2.如权利要求1所述的一种水下清洁机器人驱动器,其特征在于:所述驱动器主体(1)底部内的两侧对称固定有马达(4),且马达(4)的底部与波轮扇(5)相连接。
3.如权利要求1所述的一种水下清洁机器人驱动器,其特征在于:所述防潮除湿机构(6)包括支撑柱(601),且支撑柱(601)固定在驱动器主体(1)的顶部,所述支撑柱(601)的顶部固定有挡罩(602),且挡罩(602)的顶部开设有通孔(603)。
4.如权利要求3所述的一种水下清洁机器人驱动器,其特征在于:所述挡罩(602)的顶部通过第一螺栓(605)固定有顶盖(604),且顶盖(604)贯穿通孔(603),所述顶盖(604)的底部通过第二螺栓(607)固定有网盒(606),且网盒(606)内放置有干燥剂块(608),所述驱动器主体(1)的顶部固定有进气通道(609),所述网盒(606)伸入进气通道(609)内。
5.如权利要求1所述的一种水下清洁机器人驱动器,其特征在于:所述分支通道(9)设置有四个,且四个分支通道(9)关于驱动器主体(1)的竖直中轴线对称设置。
6.如权利要求2所述的一种水下清洁机器人驱动器,其特征在于:所述驱动器主体(1)内固定有电池组(12),且电池组(12)电性连接有动力涡扇(3)、马达(4)、波轮扇(5)、气泵(7)和排气阀(10)。
技术总结本技术涉及一种水下清洁机器人驱动器,包括驱动器主体,所述排气通道开设在驱动器主体的内部,所述驱动器主体的两侧对称开设有分支通道,所述分支通道与排气通道相贯通,所述分支通道内固定有排气阀和止逆阀。该水下清洁机器人驱动器,动力涡扇可为该装置提供动力,动力涡扇的设置可以降低成本、提高系统稳定性,且可以模块化设计,降低生产和维修成本,分支通道设置有四个,且每个分支通道内均设置有一个排气阀,通过控制打开不同的分支通道排气可控制该装置的运动方向,通过调节两侧波轮扇的速度也可控制该装置的运动方向,该装置丰富了水下清洁机器人的动力系统选择,适合不同场景,优化生产以及维护工序。技术研发人员:王坤殿,刘根淼,曹毅受保护的技术使用者:深圳市禾启智能科技有限公司技术研发日:20231229技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/226373.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表