一种水下机器人推进结构的制作方法
- 国知局
- 2024-08-01 07:08:35
本技术涉及水下机器人推进螺旋桨,具体为一种水下机器人推进结构。
背景技术:
1、在海洋探测、水下作业以及海洋科研等领域,水下机器人作为一种重要的工具被广泛应用。水下机器人通常需要在复杂的水下环境中进行定位、探测、采样、维修等任务,因此其推进系统的性能对机器人的操作能力和效率至关重要。推进系统的设计直接影响了水下机器人的机动性、稳定性和能耗效率。
2、传统的水下机器人推进系统多采用固定螺旋桨结构,这种固定结构在一定程度上满足了基本的推进需求,但在应对不同工作条件和环境时存在一些局限性。固定螺旋桨可能在高速、低速或变化水流条件下的推进效率不尽相同.
技术实现思路
1、(一)实用新型目的
2、有鉴于此,本实用新型的目的在于提出一种水下机器人推进结构,解决了上述背景中所提出的问题。
3、(二)技术方案
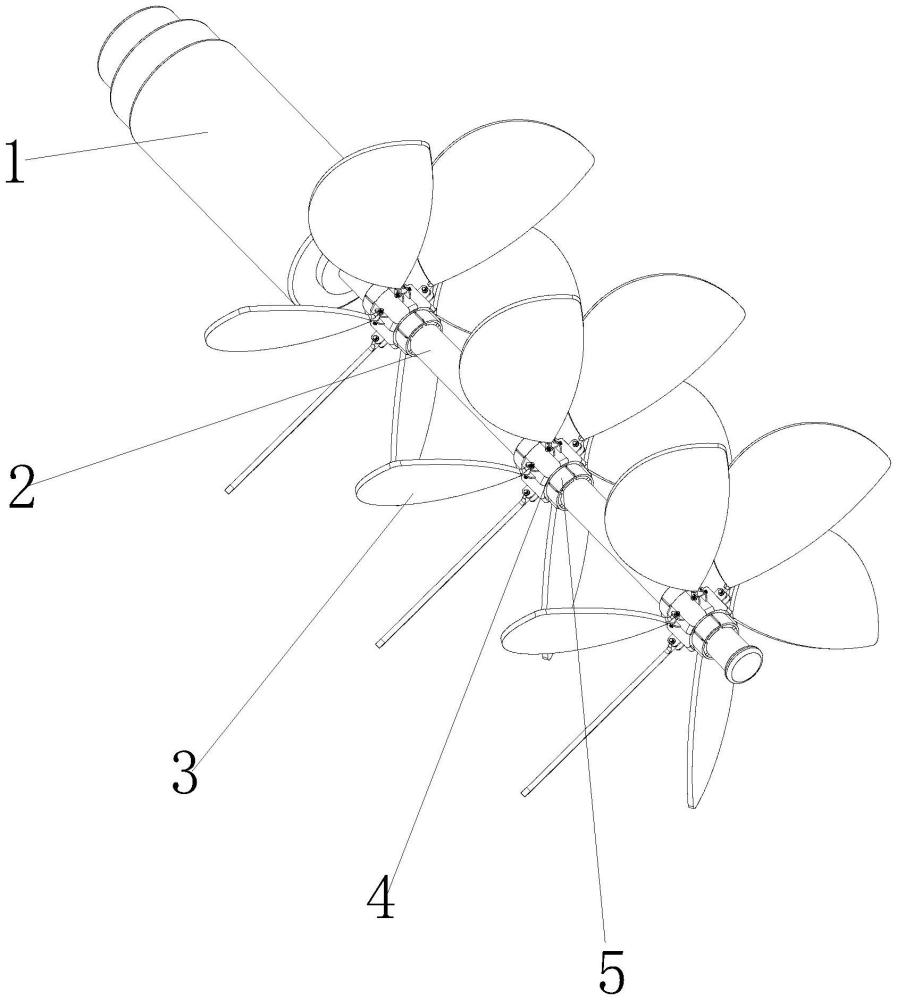
4、一种水下机器人推进结构,包括电机,所述电机的一端连接有轴杆,所述轴杆的外表面活动安装有多组连接套环,且多组连接套环的外表面皆活动安装有多组连接块,多组所述连接块的外表面皆固定安装有两组连接板,且两组连接板之间互相远离,两组所述连接板的外表面皆开设有安装槽,且安装槽的内壁活动安装有调节杆,所述调节杆的外表面连接有连接件,且连接件的一端连接有螺旋桨叶片,所述调节杆的两侧外表面皆固定安装有限位板。
5、优选的,两组所述连接板的外表面开设有多组限位槽。
6、优选的,所述限位板的一侧外表面固定安装有操作杆,且操作杆的外表面包裹有橡胶。
7、优选的,所述限位板的外表面开设有连接槽,且连接槽中活动安装有螺杆。
8、优选的,所述连接套环的前后两段外表面皆固定安装有锁紧件,且锁紧件的外表面开设有多组凹槽。
9、优选的,所述锁紧件的外表面开设有螺纹,且锁紧件的外表面活动安装有固定环,所述固定环的内壁开设有圆锥状通槽。
10、优选的,所述固定环的外表面固定安装有多组抵合板,且多组抵合板的两端皆呈圆弧状。
11、从以上技术方案可以看出,本申请具有以下有益效果:
12、1、该实用新型通过使用螺丝刀,使得螺杆从限位板外表面的连接槽脱离出来,再通过旋转操作杆,从而可以调节调节杆的角度,进而改变螺旋桨叶片的倾斜角度,从而机器人操作人员可以根据实际需求,实时地调整螺旋桨叶片的角度,且以适应不同的水流、速度和操作需求,且螺旋桨叶片的倾斜角度可以影响水下机器人的推进效率和机动性,通过调整叶片的角度,可以使螺旋桨在不同工况下都能保持较高的效率,从而提高水下机器人的性能,使其更适应不同的水下任务,再通过旋转螺杆,使得螺杆穿过连接槽与限位槽连接在一起,从而使得螺旋桨叶片稳定起来。
13、2、该实用新型通过旋转固定环,使得锁紧件可以展开来,从而使得连接套环可以在轴杆的外表面进行前后调节,从而调节螺旋桨叶片之间的距离,螺旋桨叶片之间的距离可以影响推进效率,通过调整叶片之间的间距,可以使螺旋桨在不同速度和水流条件下都能产生更有效的推进力,从而优化水下机器人的性能。
技术特征:1.一种水下机器人推进结构,包括电机(1),所述电机(1)的一端连接有轴杆(2),其特征在于:所述轴杆(2)的外表面活动安装有多组连接套环(4),且多组连接套环(4)的外表面皆活动安装有多组连接块(8),多组所述连接块(8)的外表面皆固定安装有两组连接板(6),且两组连接板(6)之间互相远离,两组所述连接板(6)的外表面皆开设有安装槽(911),且安装槽(911)的内壁活动安装有调节杆(913),所述调节杆(913)的外表面连接有连接件(916),且连接件(916)的一端连接有螺旋桨叶片(3),所述调节杆(913)的两侧外表面皆固定安装有限位板(914)。
2.根据权利要求1所述的一种水下机器人推进结构,其特征在于:两组所述连接板(6)的外表面开设有多组限位槽(912)。
3.根据权利要求1所述的一种水下机器人推进结构,其特征在于:所述限位板(914)的一侧外表面固定安装有操作杆(915),且操作杆(915)的外表面包裹有橡胶。
4.根据权利要求1所述的一种水下机器人推进结构,其特征在于:所述限位板(914)的外表面开设有连接槽,且连接槽中活动安装有螺杆(919)。
5.根据权利要求1所述的一种水下机器人推进结构,其特征在于:所述连接套环(4)的前后两段外表面皆固定安装有锁紧件(918),且锁紧件(918)的外表面开设有多组凹槽(917)。
6.根据权利要求5所述的一种水下机器人推进结构,其特征在于:所述锁紧件(918)的外表面开设有螺纹,且锁紧件(918)的外表面活动安装有固定环(5),所述固定环(5)的内壁开设有圆锥状通槽。
7.根据权利要求6所述的一种水下机器人推进结构,其特征在于:所述固定环(5)的外表面固定安装有多组抵合板(7),且多组抵合板(7)的两端皆呈圆弧状。
技术总结本技术公开提供了一种水下机器人推进结构,包括电机,所述电机的一端连接有轴杆,所述轴杆的外表面活动安装有多组连接套环,且多组连接套环的外表面皆活动安装有多组连接块,所述调节杆的外表面连接有连接件,且连接件的一端连接有螺旋桨叶片,所述调节杆的两侧外表面皆固定安装有限位板,该技术通过使用螺丝刀,使得螺杆从限位板外表面的连接槽脱离出来,再通过旋转操作杆,从而可以调节调节杆的角度,进而改变螺旋桨叶片的倾斜角度,从而机器人操作人员可以根据实际需求,实时地调整螺旋桨叶片的角度,且以适应不同的水流、速度和操作需求。技术研发人员:刘砚文,朱波,金光宇受保护的技术使用者:黑龙江展鸿研科技发展有限公司技术研发日:20231101技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/226360.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表