一种水下柔性仿生机器人的姿态调控装置
- 国知局
- 2024-08-01 07:08:40
本技术涉及水下柔性仿生机器人,尤其是涉及一种水下柔性仿生机器人的姿态调控装置。
背景技术:
1、与传统的水下机器人相比,柔性仿生骨架机器人能够更好地模拟生物运动的灵活性和自适应性,因此具有更广泛的应用潜力。然而,在柔性仿生骨架机器人的设计和应用中,仍存在一些问题和挑战。
2、以日本冈山大学在2013年研制的仿鳐科机器鱼为例,这一机器鱼采用的柔性骨架,每侧胸鳍由6个独立控制的鳍条驱动单元组成,每根鳍条由一个伺服电机经过锥齿轮减速后带动摆动,这为实现机器鱼上升和下潜策略提供了特殊运动的可能性。然而,这种设计也存在最主要的缺陷是,机器鱼的鳍条波形不能随意改变,限制了其在水下机器人领域实现更多复杂的运动行为。
3、由此可知,现有的柔性骨架仿生机器人在水下推进运动方式相对单一,难以实现复杂的运动行为,限制了水下应用中的灵活性。
技术实现思路
1、本实用新型的目的在于提供一种水下柔性仿生机器人的姿态调控装置,能够解决现有水下柔性仿生机器人存在的推进运动方式相对单一,难以实现复杂的运动行为的问题。
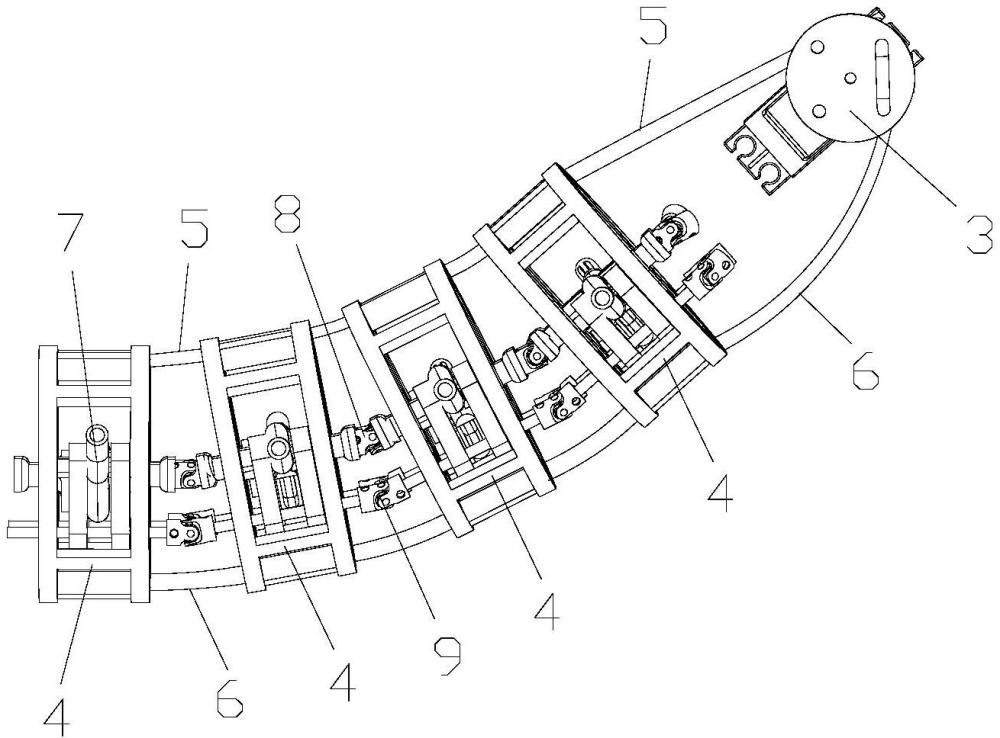
2、本实用新型提供一种水下柔性仿生机器人的姿态调控装置,包括柔性骨架、两个驱动电机、两个第一舵机和一个第二舵机,各所述驱动电机和各所述第一舵机分别设置于所述柔性骨架的前端,所述第二舵机设置于所述柔性骨架的后端;所述柔性骨架包括从前至后依次设置的多个骨架单元,各所述骨架单元的上端分别通过第一钢丝束串联,各所述骨架单元的下端分别通过第二钢丝束串联,所述第一钢丝束和所述第二钢丝束分别与所述第二舵机驱动连接;
3、各所述骨架单元上分别左右对称的安装有两个鱼鳍调控机构,各所述鱼鳍调控机构均包括第一连杆、第二连杆、凸轮驱动组件和角度调节组件,所述第一连杆的第一端滑动套接于所述第二连杆的第一端,所述第一连杆的第二端与所述凸轮驱动组件相连,所述凸轮驱动组件与所述骨架单元相连;所述角度调节组件分别连接所述第二连杆和所述骨架单元,在所述第二连杆的第二端连接有鳍片;各所述骨架单元上的所述凸轮驱动组件通过第一万向节依次连接,且两个所述驱动电机分别与最前端的所述骨架单元上的两个所述凸轮驱动组件对应驱动连接;各所述骨架单元上的所述角度调节组件通过第二万向节依次连接,且两个所述第一舵机分别与最前端的所述骨架单元上的两个所述角度调节组件对应驱动连接。
4、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,在所述第一连杆的第二端设有第一通孔;所述凸轮驱动组件包括依次连接的第一驱动杆、凸轮突出部、凸轮凹陷部和第二驱动杆,在所述凸轮突出部上设有与所述第一驱动杆的矩形截面相适配的第一矩形插孔,所述第一驱动杆的第一端与所述第一矩形插孔相插接;在所述凸轮凹陷部上设有与所述第二驱动杆的矩形截面相适配的第二矩形插孔,所述第二驱动杆的第一端与所述第二矩形插孔相插接;在所述凸轮突出部上设有第一花键轴,在所述凸轮凹陷部上设有与所述第一花键轴相适配的第一花键孔,所述第一花键轴穿过所述第一通孔与所述第一花键孔相插接。
5、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,在所述骨架单元的内部分别设有与所述第一驱动杆相配合的第一连接孔以及与所述第二驱动杆相配合的第二连接孔,所述第一驱动杆的第一端穿过所述第一连接孔与所述第一矩形插孔相插接,所述第二驱动杆的第一端穿过所述第二连接孔与所述第二矩形插孔相插接。
6、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,所述第一驱动杆的第二端与所述第一万向节固定连接。
7、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,所述第二连杆的第一端设有套管,所述第一连杆的第一端滑动套接于所述套管内;在所述套管上靠近所述第二连杆的位置处设有第二通孔。
8、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,所述角度调节组件包括连架杆突出部、连架杆凹陷部和调节轴,在所述连架杆突出部的第一端设有第二花键轴,在所述连架杆凹陷部的第一端设有与所述第二花键轴相适配的第二花键孔,所述第二花键轴穿过所述第二通孔与所述第二花键孔相插接;在所述连架杆突出部的第二端和所述连架杆凹陷部的第二端分别设有十字孔,在所述调节轴上设有与两个所述十字孔分别对应的两个限位凸块,所述调节轴分别穿过两个所述十字孔,且两个所述限位凸块分别卡装在两个所述十字孔中。
9、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,在所述骨架单元的内侧分别设有与所述调节轴相配合的两个第三连接孔,所述连架杆突出部和所述连架杆凹陷部分别位于两个所述第三连接孔之间,且所述调节轴的第一端分别穿过两个所述第三连接孔。
10、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,所述调节轴的第二端与所述第二万向节固定连接。
11、根据本实用新型提供的一种水下柔性仿生机器人的姿态调控装置,在所述第一舵机的输出轴上固设有第一连接圆盘,在对应的所述角度调节组件上的所述调节轴上固设有第二连接圆盘,所述第一连接圆盘与所述第二连接圆盘之间通过连接件连接固定。
12、本实用新型提供的水下柔性仿生机器人的姿态调控装置,包括柔性骨架、两个驱动电机、两个第一舵机和一个第二舵机,将各驱动电机和各第一舵机分别设置于柔性骨架的前端,将第二舵机设置于柔性骨架的后端;其中柔性骨架包括从前至后依次设置的多个骨架单元,各骨架单元的上端分别通过第一钢丝束串联,各骨架单元的下端分别通过第二钢丝束串联,第一钢丝束和第二钢丝束分别与第二舵机驱动连接,由此,通过第二舵机能够驱动第一钢丝束、第二钢丝束实现拉紧或放松动作,从而带动柔性骨架进行向上弯曲或向下弯曲运动;其中在各骨架单元上分别左右对称的安装有两个鱼鳍调控机构,各鱼鳍调控机构均包括第一连杆、第二连杆、凸轮驱动组件和角度调节组件,将第一连杆的第一端滑动套接于第二连杆的第一端,将第一连杆的第二端与凸轮驱动组件相连,将凸轮驱动组件与骨架单元相连;将角度调节组件分别连接第二连杆和骨架单元,在第二连杆的第二端连接有鳍片;各骨架单元上的凸轮驱动组件通过第一万向节依次连接,且两个驱动电机分别与最前端的所述骨架单元上的两个凸轮驱动组件对应驱动连接;各骨架单元上的角度调节组件通过第二万向节依次连接,且两个第一舵机分别与最前端的骨架单元上的两个角度调节组件对应驱动连接;由此,通过驱动电机能够带动凸轮驱动组件转动,从而在凸轮驱动组件的作用下能够带动第二连杆上的鳍片进行上下摆动,从而实现柔性骨架的向前推进,并且通过控制两个驱动电机的转速不同,能够实现柔性骨架的左转或右转运动;通过第一舵机能够带动角度调节组件进行角度调整,从而在角度调节组件的作用下能够带动第二连杆上的鳍片进行位置调整,从而改变柔性骨架的波幅波形。由此,本实用新型提供的水下柔性仿生机器人的姿态调控装置,通过结合鳍片上下摆动的运动控制和柔性骨架元的弯曲控制以及柔性骨架的波幅波形调控,从而精确的实现对水下柔性仿生机器人的推进运动方式和运动姿态的实时调控。
技术特征:1.一种水下柔性仿生机器人的姿态调控装置,其特征在于,包括柔性骨架、两个驱动电机、两个第一舵机和一个第二舵机,各所述驱动电机和各所述第一舵机分别设置于所述柔性骨架的前端,所述第二舵机设置于所述柔性骨架的后端;所述柔性骨架包括从前至后依次设置的多个骨架单元,各所述骨架单元的上端分别通过第一钢丝束串联,各所述骨架单元的下端分别通过第二钢丝束串联,所述第一钢丝束和所述第二钢丝束分别与所述第二舵机驱动连接;
2.根据权利要求1所述的水下柔性仿生机器人的姿态调控装置,其特征在于,在所述第一连杆的第二端设有第一通孔;所述凸轮驱动组件包括依次连接的第一驱动杆、凸轮突出部、凸轮凹陷部和第二驱动杆,在所述凸轮突出部上设有与所述第一驱动杆的矩形截面相适配的第一矩形插孔,所述第一驱动杆的第一端与所述第一矩形插孔相插接;在所述凸轮凹陷部上设有与所述第二驱动杆的矩形截面相适配的第二矩形插孔,所述第二驱动杆的第一端与所述第二矩形插孔相插接;在所述凸轮突出部上设有第一花键轴,在所述凸轮凹陷部上设有与所述第一花键轴相适配的第一花键孔,所述第一花键轴穿过所述第一通孔与所述第一花键孔相插接。
3.根据权利要求2所述的水下柔性仿生机器人的姿态调控装置,其特征在于,在所述骨架单元的内部分别设有与所述第一驱动杆相配合的第一连接孔以及与所述第二驱动杆相配合的第二连接孔,所述第一驱动杆的第一端穿过所述第一连接孔与所述第一矩形插孔相插接,所述第二驱动杆的第一端穿过所述第二连接孔与所述第二矩形插孔相插接。
4.根据权利要求2所述的水下柔性仿生机器人的姿态调控装置,其特征在于,所述第一驱动杆的第二端与所述第一万向节固定连接。
5.根据权利要求1所述的水下柔性仿生机器人的姿态调控装置,其特征在于,所述第二连杆的第一端设有套管,所述第一连杆的第一端滑动套接于所述套管内;在所述套管上靠近所述第二连杆的位置处设有第二通孔。
6.根据权利要求5所述的水下柔性仿生机器人的姿态调控装置,其特征在于,所述角度调节组件包括连架杆突出部、连架杆凹陷部和调节轴,在所述连架杆突出部的第一端设有第二花键轴,在所述连架杆凹陷部的第一端设有与所述第二花键轴相适配的第二花键孔,所述第二花键轴穿过所述第二通孔与所述第二花键孔相插接;在所述连架杆突出部的第二端和所述连架杆凹陷部的第二端分别设有十字孔,在所述调节轴上设有与两个所述十字孔分别对应的两个限位凸块,所述调节轴分别穿过两个所述十字孔,且两个所述限位凸块分别卡装在两个所述十字孔中。
7.根据权利要求6所述的水下柔性仿生机器人的姿态调控装置,其特征在于,在所述骨架单元的内侧分别设有与所述调节轴相配合的两个第三连接孔,所述连架杆突出部和所述连架杆凹陷部分别位于两个所述第三连接孔之间,且所述调节轴的第一端分别穿过两个所述第三连接孔。
8.根据权利要求7所述的水下柔性仿生机器人的姿态调控装置,其特征在于,所述调节轴的第二端与所述第二万向节固定连接。
9.根据权利要求6所述的水下柔性仿生机器人的姿态调控装置,其特征在于,在所述第一舵机的输出轴上固设有第一连接圆盘,在对应的所述角度调节组件上的所述调节轴上固设有第二连接圆盘,所述第一连接圆盘与所述第二连接圆盘之间通过连接件连接固定。
技术总结本技术提供了一种水下柔性仿生机器人的姿态调控装置,包括柔性骨架、两个驱动电机、两个第一舵机和一个第二舵机,柔性骨架包括从前至后依次设置的多个骨架单元,各骨架单元之间分别通过第一钢丝束和第二钢丝束串联,第一钢丝束和第二钢丝束分别与第二舵机驱动连接;各骨架单元上分别左右对称的安装有两个鱼鳍调控机构,各鱼鳍调控机构均包括第一连杆、第二连杆、凸轮驱动组件和角度调节组件,各骨架单元上的凸轮驱动组件通过第一万向节依次连接,各骨架单元上的角度调节组件通过第二万向节依次连接。本技术提供的水下柔性仿生机器人的姿态调控装置,能够精确的实现对水下柔性仿生机器人的前进速度和运动姿态的实时调控。技术研发人员:吴博淳,陈炫丰,温嘉文,刘金辉,李天注,林海涛,刘长红受保护的技术使用者:广州大学技术研发日:20231206技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/226366.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。