一种基于康达效应的抓吸一体式水下机械抓头
- 国知局
- 2024-08-01 07:09:59
本发明属于水下抓取机器人领域,涉及了一种基于康达效应的抓吸一体式机械抓头。
背景技术:
1、随着人们对海洋的探索和开发,水下物体的快速抓获在海洋环保、海洋渔业、海洋矿产勘探等领域的要求越来越高。在海洋环保领域,水下垃圾是否能够快速抓取直接决定了海底垃圾机器处理方案是否可行;在海洋渔业领域,海参、贝壳等水产品的机械抓取捕获具有十分客观的商业前景,而是否能够快速捕获是海洋水产机械捕获的决定性因素之一;在海洋矿产资源勘探领域,水下抓取机器人的探矿功能为我们开发辽阔海洋提供了科技力量,而是否能够快速、便捷的取矿则是水下抓取机器人在海底探矿过程种的重要指标;因此水下物体的快速抓取方案有着迫切的实际工程需求。
技术实现思路
1、针对上述问题,本发明目的是提出了一种基于康达效应的抓吸一体式机械抓头以适配各类水下抓取机器人(一种基于康达效应的抓吸一体式机械抓头),从而为水下物体的快速提供技术方案。
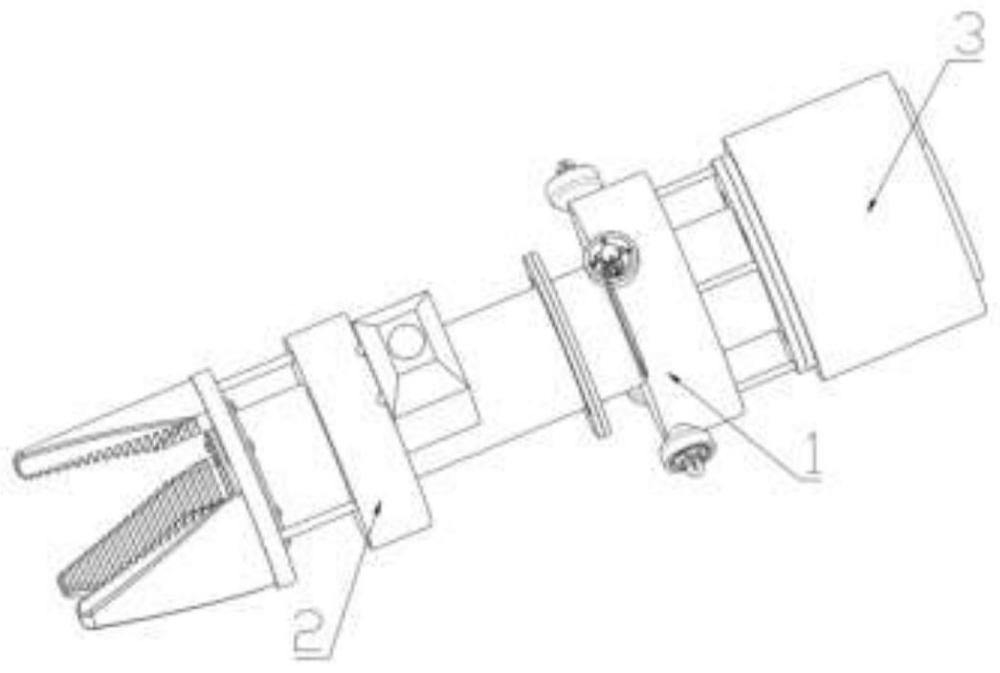
2、本发明的技术方案是:本发明所述的一种基于康达效应的抓吸一体式水下机械抓头,包括通过管道联通的康达效应吸力臂(1)、柔性机械爪(2)及机械臂连接头(3);
3、所述康达效应吸力臂(1)的前端通过法兰连接方式连接在柔性机械爪(2)上,所述康达效应吸力臂(1)的后端通过法兰与机械臂连接头(3)相连接,所述康达效应吸力臂(1)通过机械臂连接头(3)连接在安置的水下抓取机器人的机械臂上。
4、进一步的,所述康达效应吸力臂(1)包括主体外壳(11)、安置主体外壳(11)上的第一连通管(13)及第二连通管(15);
5、所述主体外壳(11)包括密封防腐外壳(111),所述的密封防腐外壳(111)分别与第一连通管(13)、第二连通管(15)焊接成密封空间;
6、在相互靠近的两侧所述第二连通管(15)与第一连通管(13)之间开设有漏斗形螺旋桨连接口(113),在所述漏斗形螺旋桨连接口(113)中安置有螺旋桨(114)。
7、进一步的,在所述第二连通管(15)的内壁安置有弧形曲壁(112),在所述弧形曲壁(112)紧接漏斗形螺旋桨连接口(113)处通过焊接联通;
8、所述漏斗形螺旋桨连接口(113)为漏斗形状结构,其朝外的大开口固定螺旋桨(114),朝内的小开口与弧形曲壁(112)相互联通;
9、在所述密封防腐外壳(111)的内部安置有螺旋桨控制器(115),所述螺旋桨控制器(115)固定安置在密封防腐外壳(111)和(112)构成的内部腔体内、且与螺旋桨(114)通过线缆联通。
10、进一步的,所述的密封防腐外壳(111)采用防腐材料制成的;
11、所述螺旋桨(114)为带有电机的电动桨叶结构。
12、进一步的,在所述第一连通管(13)的一端安置有机械爪连接法兰(12),所述机械爪连接法兰(12)焊接在第一连通管(13)上,第一连通管(13)与主体外壳(11)的底部开口焊接;
13、在所述第二连通管(15)的一端安置有接头法兰(16),所述第二连通管(15)与接头法兰(16)焊接连接、且通过接头法兰(16)联通机械臂连接头(3);
14、在所述主体外壳(11)的上部焊接有若干个中空结构状的防腐中空连接杆(14),所述防腐中空连接杆(14)与机械臂连接头(3)相连接;
15、在所述防腐中空连接杆(14)的中空内部排布有线缆。
16、进一步的,所述柔性机械爪(2)包括若干个柔性抓手(21)、控制轮盘(22)、连接口(23)及联通管道(25);
17、若干个所述柔性抓手(21)安置在控制轮盘(22)上,所述控制轮盘(22)通过安置的连接口(23)与联通管道(25)相连接;
18、在所述联通管道(25)的管道外壁上固定安置有环形结构状的控制器(26),在所述控制轮盘(22)与控制器(26)之间安置有控制连杆(24),所述控制连杆(24)的一端连接在控制轮盘(22)上,其另一端连接在控制器(26)上,
19、在所述联通管道(25)的管道外壁上、所述控制器(26)的一侧外壁处安置有信息获取与处理模块(27),所述控制器(26)与信息获取与处理模块(27)相互连接。
20、进一步的,所述信息获取与处理模块(27)包括安置其顶端外壁的360°摄像头(271)及安置在其前端外壁的距离传感器(272)及计算机(273);
21、所述360°摄像头(271)、距离传感器(272)及计算机(273)之间通过线路相互连接,再通过线路连接在控制器(26)上。
22、进一步的,在所述联通管道(25)的另一端还连接有第一吸力臂连接法兰(28),
23、所述第一吸力臂连接法兰(28)与机械爪连接法兰(12)之间通过螺母连接、且在连接处布置有密封垫片。
24、进一步的,所述机械臂连接头(3)包括防护外壳(31),在所述防护外壳(31)上安置有第二吸力臂连接法兰(32),所述第二吸力臂连接法兰(32)与机械爪连接法兰(12)之间通过螺母连接、且在连接处布置有密封垫片;
25、在所述机械臂连接头(3)上还安置有输送软管连接法兰(33)及机器人机械臂接口(34);
26、在所述输送软管连接法兰(33)处连接有软管,所述输送软管连接法兰(33)通过软管连接在水下抓取机器人的机械臂上;
27、所述机器人机械臂接口(34)的底部连接有信息集成传输中心(35)。
28、进一步的,在所述机械臂连接头(3)中开设有柔性连通管(36),
29、所述柔性连通管(36)的两端分别与第二吸力臂连接法兰(32)及输送软管连接法兰(33)固接。
30、本发明的基本原理在于:本发明利用康达效应原理:流体(水流或气流)由偏离原本流动方向,改为随着凸出的物体表面流动的倾向。同时会在流体区域内产生负压。
31、本发明采用抓吸一体式设计思路,通过柔性机械爪抓取、负压吸力流道吸收,实现快速抓取。
32、本发明的有益效果是:本发明的特点是:1、本发明利用康达效应原理,通过螺旋桨排水和曲壁配合形成负压,结构简单,避免了复杂的泵结构,提升了抓取装备的实用性,同时降低了制造成本、维护成本,提高了寿命周期;2、本发明采用抓吸一体式设计思路,避免了传统水下抓取的从目标抓取物地点到目标抓取物存放点的过程,大大节省了抓取时间,为快速水下抓取作业提供了方案。
技术特征:1.一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,包括通过管道联通的康达效应吸力臂(1)、柔性机械爪(2)及机械臂连接头(3);
2.根据权利要求1所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,所述康达效应吸力臂(1)包括主体外壳(11)、安置主体外壳(11)上的第一连通管(13)及第二连通管(15);
3.根据权利要求2所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,在所述第二连通管(15)的内壁安置有弧形曲壁(112),在所述弧形曲壁(112)紧接漏斗形螺旋桨连接口(113)处通过焊接联通;
4.根据权利要求2所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,所述的密封防腐外壳(111)采用防腐材料制成的;
5.根据权利要求2所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,在所述第一连通管(13)的一端安置有机械爪连接法兰(12),所述机械爪连接法兰(12)焊接在第一连通管(13)上,第一连通管(13)与主体外壳(11)的底部开口焊接;
6.根据权利要求1所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,所述柔性机械爪(2)包括若干个柔性抓手(21)、控制轮盘(22)、连接口(23)及联通管道(25);
7.根据权利要求6所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,所述信息获取与处理模块(27)包括安置其顶端外壁的360°摄像头(271)及安置在其前端外壁的距离传感器(272)及计算机(273);
8.根据权利要求7所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,在所述联通管道(25)的另一端还连接有第一吸力臂连接法兰(28),
9.根据权利要求1所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,所述机械臂连接头(3)包括防护外壳(31),在所述防护外壳(31)上安置有第二吸力臂连接法兰(32),所述第二吸力臂连接法兰(32)与机械爪连接法兰(12)之间通过螺母连接、且在连接处布置有密封垫片;
10.根据权利要求9所述的一种基于康达效应的抓吸一体式水下机械抓头,其特征在于,在所述机械臂连接头(3)中开设有柔性连通管(36),
技术总结本发明公开了一种基于康达效应的抓吸一体式水下机械抓头;属于水下抓取机器人领域,包括康达效应吸力臂、柔性机械爪和机械臂连接头等设备;本发明利用康达效应原理,通过螺旋桨排水和曲壁配合形成负压,避免了复杂的泵结构,结构简单,提升了抓取装备的实用性,同时降低了制造成本、维护成本,提高了寿命周期;另外,采用抓吸一体式设计思路,避免了传统水下抓取的从目标抓取物地点到目标抓取物存放点的过程,大大节省了抓取时间,为快速水下抓取作业提供了方案。技术研发人员:李秀,徐立新,刘亚娇,窦培林,洪智超,韩超帅,张曙光,沈人杰,于雪莹,盛兴受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/226432.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表