一种单节点运动机器鱼
- 国知局
- 2024-08-01 07:14:38
本发明涉及仿生机械,特别是涉及一种单节点运动机器鱼。
背景技术:
1、海洋具有丰富的天然能源、矿产、海洋生物等自然资源,合理的开发与可利用海洋资源是解决当前资源紧缺的途径之一,也是社会经济持续发展的重要支撑。由于海洋环境复杂,人类去完成各类工作的难度较大,并且复杂的海洋环境也具有一定的危险性,因此对于海洋探测相关水下装备的机器人需求逐渐增大。
2、目前,水下机器人可分为有缆遥控水下机器人和无缆遥控水下机器人两种。其中有缆遥控水下机器人需要人员岸上操作,且大多采用螺旋桨驱动的方式,具有噪声大,推进效率低,机动性差的缺点。无缆水下机器人中的仿生机器人通过模仿水下生物的运动特性和游动机制获取推力,其中仿生机器鱼通过模仿鱼类运动,利用鱼鳍或鱼体摆动获取推力,相对于采用螺旋桨驱动的水下机器人,机器鱼不仅实现了动力机构与航向机构的一体化,而且具有机动能力强,扰动小,推进效率大等优点,在鱼群监测,水质监测,科普教育上具有广泛的应用前景。但是现有技术中,机器鱼的结构复杂,且能耗较高,制约了水下监测工作效率的提升。
技术实现思路
1、本发明的目的是提供一种单节点运动机器鱼,以解决上述现有技术存在的问题,在保证机器鱼运动灵活的前提下,简化机器鱼结构,降低能耗,提升机器鱼的适应性,提高水下监测工作效率。
2、为实现上述目的,本发明提供了如下方案:
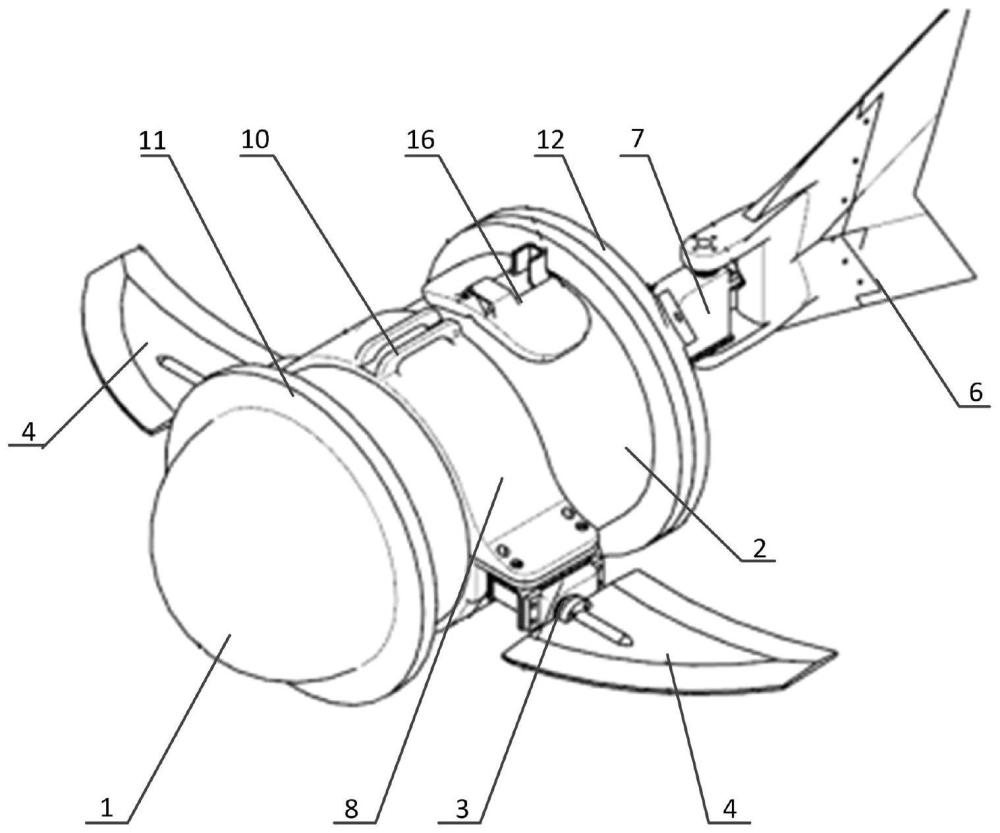
3、本发明提供一种单节点运动机器鱼,包括:头部单元,所述头部单元包括透明罩,所述透明罩具有球面结构;
4、鱼身单元,所述鱼身单元包括鱼身壳体、第一驱动器以及两胸鳍,两所述胸鳍对称设置于所述鱼身壳体的两侧,且两所述胸鳍的连线方向垂直于所述单节点运动机器鱼的长度方向;所述第一驱动器设置于所述鱼身壳体上,所述第一驱动器的输出端与所述胸鳍相连,且所述第一驱动器与所述胸鳍一一对应;所述鱼身壳体为中空结构;
5、尾部单元,所述尾部单元包括尾部壳体、尾鳍以及第二驱动器,所述第二驱动器设置于所述尾部壳体上,所述第二驱动器的输出端与所述尾鳍相连;
6、所述透明罩、所述鱼身壳体以及所述尾部壳体依次相连并围成密封舱,所述密封舱内设置有监测元件、控制元件以及电池,所述监测元件用于监测工作,所述监测元件、所述第一驱动器以及所述第二驱动器均与所述控制元件通信连接,所述监测元件、所述控制元件、所述第一驱动器以及所述第二驱动器均与所述电池电连接。
7、优选地,所述鱼身单元还包括第一安装支架,所述第一安装支架套设于所述鱼身壳体的外部,所述第一安装支架与所述第一驱动器可拆卸连接。
8、优选地,所述第一安装支架为分体式结构,所述第一安装支架上还设置有用于安装监测传感器的监测安装位。
9、优选地,所述鱼身壳体为中空圆柱状结构,所述鱼身壳体与所述透明罩的球面结构同轴设置;所述透明罩的球面结构朝向远离所述鱼身壳体的方向设置,所述透明罩靠近所述鱼身壳体的一侧具有头部连接盘,所述透明罩利用所述头部连接盘与所述鱼身壳体相连。
10、优选地,所述胸鳍为板状结构,且所述胸鳍的板面平行于所述第一驱动器输出端的转动轴线;
11、所述胸鳍具有第一侧立面、第二侧立面、第三侧立面和第四侧立面,所述第一侧立面与所述第一驱动器的输出端相连,所述第二侧立面和所述第三侧立面分别位于所述第一侧立面的两侧,且所述第二侧立面和所述第三侧立面均为弧面,所述第二侧立面靠近所述头部单元设置,所述第三侧立面靠近所述尾部单元设置,所述第四侧立面平行于所述第一侧立面,所述第二侧立面远离所述第一侧立面的一端朝向所述尾部单元的方向延伸并与所述第四侧立面相交。
12、优选地,所述尾部壳体包括尾部连接盘和第二安装支架,所述第二安装支架利用所述尾部连接盘与所述鱼身壳体相连,所述第二驱动器设置于所述第二安装支架上;所述第二安装支架为框架结构。
13、优选地,所述尾鳍包括第一鱼尾板和第二鱼尾板,所述第一鱼尾板连接所述尾部壳体和所述第二鱼尾板,所述第一鱼尾板由刚性材质制成,所述第二鱼尾板由柔性材质制成。
14、优选地,所述第一鱼尾板以及所述第二鱼尾板均为v形,所述第一鱼尾板以及所述第二鱼尾板的开口方向朝向远离所述鱼身单元的方向。
15、优选地,所述第二鱼尾板由tpu材质制成。
16、优选地,所述鱼身壳体上设置有无线充电发射端,所述电池连接有无线充电接收端,所述无线充电发射端能够与外部电源电连接,并将能量传输至所述无线充电接收端,以实现对所述电池充电。
17、本发明相对于现有技术取得了以下技术效果:本发明的单节点运动机器鱼,包括头部单元、鱼身单元以及尾部单元,头部单元包括透明罩,透明罩具有球面结构;鱼身单元包括鱼身壳体、第一驱动器以及两胸鳍,两胸鳍对称设置于鱼身壳体的两侧,且两胸鳍的连线方向垂直于单节点运动机器鱼的长度方向;第一驱动器设置于鱼身壳体上,第一驱动器的输出端与胸鳍相连,且第一驱动器与胸鳍一一对应;鱼身壳体为中空结构;尾部单元包括尾部壳体、尾鳍以及第二驱动器,第二驱动器设置于尾部壳体上,第二驱动器的输出端与尾鳍相连;透明罩、鱼身壳体以及尾部壳体依次相连并围成密封舱,密封舱内设置有监测元件、控制元件以及电池,监测元件用于监测工作,监测元件、第一驱动器以及第二驱动器均与控制元件通信连接,监测元件、控制元件、第一驱动器以及第二驱动器均与电池电连接。
18、本发明的单节点运动机器鱼,第一驱动器能够带动胸鳍摆动,第二驱动器能够带动尾鳍摆动,第一驱动器以及第二驱动器均可采用单节点舵机。单节点运动机器鱼运动时,第二驱动器带动尾鳍做摆动运动,使单节点运动机器鱼向前运动,通过控制胸鳍摆动角度以摆动频率,可以为单节点运动机器鱼提供不同的航向角、不同力度的推进力,由胸鳍与水流方向形成不同角度攻角,产生不同的俯仰角度变化,从而调整单节点运动机器鱼的运动状态,实现上浮、下潜、转弯、翻滚等动作。透明罩、鱼身壳体以及尾部壳体依次相连并围成密封舱,密封舱内设置有监测元件、控制元件以及电池,监测元件用于水下监测工作,透明罩方便了监测元件的工作,控制元件用于控制单节点运动机器鱼的运动状态,电池为单节点运动机器鱼提供了动力来源。本发明的单节点运动机器鱼结构简单,布局紧凑,采用单节点舵机驱动,运动灵活、噪音小且能耗较低,提高了单节点运动机器鱼的适应性,有利于提升水下监测工作效率。
技术特征:1.一种单节点运动机器鱼,其特征在于,包括:
2.根据权利要求1所述的单节点运动机器鱼,其特征在于:所述鱼身单元还包括第一安装支架,所述第一安装支架套设于所述鱼身壳体的外部,所述第一安装支架与所述第一驱动器可拆卸连接。
3.根据权利要求2所述的单节点运动机器鱼,其特征在于:所述第一安装支架为分体式结构,所述第一安装支架上还设置有用于安装监测传感器的监测安装位。
4.根据权利要求1所述的单节点运动机器鱼,其特征在于:所述鱼身壳体为中空圆柱状结构,所述鱼身壳体与所述透明罩的球面结构同轴设置;所述透明罩的球面结构朝向远离所述鱼身壳体的方向设置,所述透明罩靠近所述鱼身壳体的一侧具有头部连接盘,所述透明罩利用所述头部连接盘与所述鱼身壳体相连。
5.根据权利要求1所述的单节点运动机器鱼,其特征在于:所述胸鳍为板状结构,且所述胸鳍的板面平行于所述第一驱动器输出端的转动轴线;
6.根据权利要求1所述的单节点运动机器鱼,其特征在于:所述尾部壳体包括尾部连接盘和第二安装支架,所述第二安装支架利用所述尾部连接盘与所述鱼身壳体相连,所述第二驱动器设置于所述第二安装支架上;所述第二安装支架为框架结构。
7.根据权利要求1-6任一项所述的单节点运动机器鱼,其特征在于:所述尾鳍包括第一鱼尾板和第二鱼尾板,所述第一鱼尾板连接所述尾部壳体和所述第二鱼尾板,所述第一鱼尾板由刚性材质制成,所述第二鱼尾板由柔性材质制成。
8.根据权利要求7所述的单节点运动机器鱼,其特征在于:所述第一鱼尾板以及所述第二鱼尾板均为v形,所述第一鱼尾板以及所述第二鱼尾板的开口方向朝向远离所述鱼身单元的方向。
9.根据权利要求7所述的单节点运动机器鱼,其特征在于:所述第二鱼尾板由tpu材质制成。
10.根据权利要求1-6任一项所述的单节点运动机器鱼,其特征在于:所述鱼身壳体上设置有无线充电发射端,所述电池连接有无线充电接收端,所述无线充电发射端能够与外部电源电连接,并将能量传输至所述无线充电接收端,以实现对所述电池充电。
技术总结本发明公开了一种单节点运动机器鱼,包括头部单元、鱼身单元以及尾部单元,头部单元包括透明罩,鱼身单元包括鱼身壳体、第一驱动器以及两胸鳍,尾部单元包括尾部壳体、尾鳍以及第二驱动器,机器鱼运动时,第二驱动器带动尾鳍做摆动运动,使机器鱼向前运动,通过控制胸鳍摆动角度以摆动频率,可以为机器鱼提供不同的航向角、不同力度的推进力,由胸鳍与水流方向形成不同角度攻角,产生不同的俯仰角度变化,从而调整机器鱼的运动状态,实现上浮、下潜、转弯、翻滚等动作。本发明的机器鱼结构简单,布局紧凑,采用单节点舵机驱动,运动灵活、噪音小且能耗较低,提高了机器鱼的适应性,有利于提升水下监测工作效率。技术研发人员:黄红武,高秀晶,杨辉宝,江杰洪,胡书恒,刘佳豪,张碧雯受保护的技术使用者:福建理工大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/226690.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。