一种使用仿生鳍及泵喷混合推进的水下机器人及控制方法
- 国知局
- 2024-08-01 07:14:37
本发明属于混合推进机器人,涉及一种使用仿生鳍及泵喷混合推进的水下机器人及控制方法。
背景技术:
1、喷射推进作为新型推进形式之一,主要通过推进泵向反航行方向喷射从而产生反作用力实现水下推进。2013年,ba等设计了一种3自由度并联水下机器人,该装置通过喷嘴与其上方的并联机构的配合,可以实现水下机器人的偏航、俯仰等动作;2014年,麻省理工学院研制了一种软体水下机器人,该装置通过身体前部设置的一喷射推进器即可实现仿鱼水下动作;2014年,li等研制了新型水下球形机器人sur-iii,该装置为 4 喷射推进器布置,提高了水下运动性能和控制精度;2018年,xing等研制出了一种球形两栖机器人,该装置设有4个腿式多矢量水射流驱动机构,实现了长距离水下高速运动。
2、仿生推进系统是通过研究生物体的构造及其运动机理研制出的类生物体水下推进装置,由于生物推进机制不同,仿生推进也呈现出各种各样的形式。仿生推进从身体/尾鳍推进模式(bcf)逐渐发展至中央鳍/对鳍推进模式(mpf)。2005年,kim等研制了一种基ipmc驱动的仿蝌蚪微型机器人,该装置通过尾鳍的摆动实现水下推进;2005年,deng等研制出一种基于 pzt驱动的仿箱鲀科机器鱼,该装置通过尾鳍配合胸鳍动作实现水下推进;2010年,王扬威等研制了一种基于sma驱动的仿蝠鲼机器鱼,该装置通过胸鳍波动实现水下推进。2012年,chen等研制了一种基于ipmc驱动的仿牛鼻魟鱼机器人,该装置通过三角鱼鳍波动实现水下推进;除此之外,国内学者还研制出一些其他模式的仿生推进式水下机器人:2014年,si等研制了一种仿龙虾式机器人,该装置通过6足移动实现水下推进;2015年,樊继壮等研制了一种仿青蛙式机器人,该装置通过机械传动装置将推进力施加到底部2个脚掌从而实现水下推进。
3、混合推进将 2 种或者 2 种以上的推进形式集为一体,不局限于单一的推进模式,通过各种推进形式的功能互补,使载体具备优异的水下推进效能。2010年,yu等研制了一种混合推进两栖机器人,该装置共设置 4 组轮-螺旋桨一体式推进器,并且在机器人的中部设置1组仿生足,通过推进形式的自由切换,即可实现两栖推进;2010年,天津大学武建国研制了水下滑翔机petrel i,这是我国首台混合推进型水下滑翔机,填补了国内技术空白。2013年,shi等研制了一种足式球形机器人,该装置采用喷射与仿生足混合推进的形式,实现了良好的两栖巡航功能。
4、随着国内外学者对水下机器人的研究不断深入,水下推进形式也在不断发展,但目前要实现水下机器人高效、灵活、大深度作业依旧面临着很多的问题,噪声与振动的控制、运动性能的提升、混合推进的融合度和仿生推进的拟合度等方面都限制着水下机器人的发展。
技术实现思路
1、为了解决现有技术中存在的上述技术问题,本发明提出了一种使用仿生鳍及泵喷混合推进的水下机器人及控制方法,其具体技术方案如下:
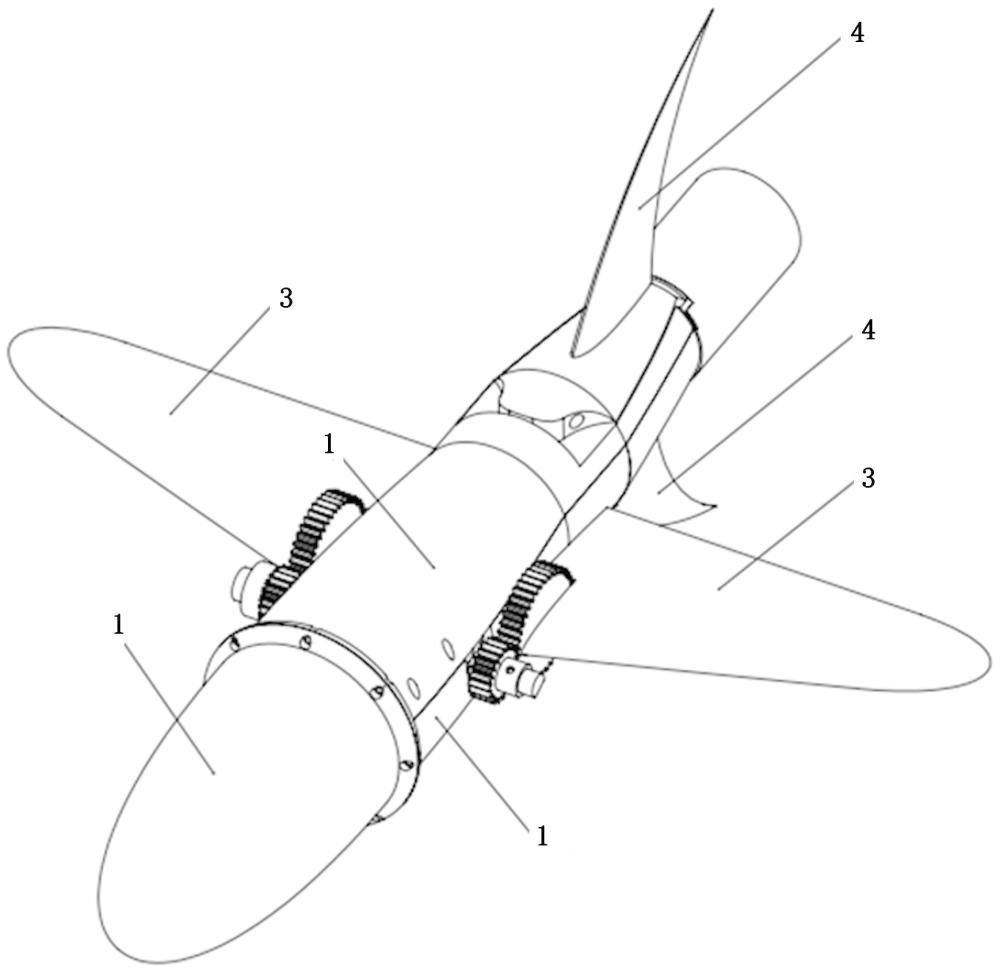
2、一种使用仿生鳍及泵喷混合推进的水下机器人,包括外壳、内壳、水平舵模块、仿生尾鳍转向模块、喷泵推进模块和控制模块;所述内壳密封设置在外壳内;所述水平舵模块包括左水平舵与右水平舵,所述左水平舵与右水平舵对称分布在外壳左右两侧;所述仿生尾鳍转向模块包括上尾鳍与下尾鳍,所述上尾鳍与下尾鳍对称分布在外壳上下两侧;所述喷泵推进模块配置安装在所述外壳尾部;所述控制模块安装在内壳中,并与仿生尾鳍转向模块、水平舵模块和喷泵推进模块电连接以进行对应控制。
3、进一步的,所述内壳包括头内壳体、中内壳体以及尾内壳体,所述头内壳体、中内壳体以及尾内壳体之间通过防水树脂胶密封连接;中内壳体中心具有固定电池的正方形凹槽;尾内壳体后部设有舵机线孔和喷泵过线孔并使用有机硅密封胶进行密封;尾内壳体中设有控制电路板固定孔;头内壳体前部使用不锈钢防水堵头密封。
4、进一步的,所述外壳包括头壳体、上尾壳体、下尾壳体,所述头壳体后部具有与上尾壳体以及下尾壳体连接的法兰结构,法兰结构中的各个法兰孔大小形状完全相同并通过m2螺丝螺母连接;所述上尾壳体前部通过 m2螺孔,使用m2螺丝螺母与下尾壳体前部连接,上尾壳体上和下尾壳体下的后部采用凹凸槽结构固定,并在壳体内侧上下对应配合设置有喷泵安装槽;所述下尾壳体的左右两侧开有相对应的左轴孔和右轴孔,且在右侧固定设有从动轴;在所述上尾壳体和下尾壳体上还分别设有上下对应的上轴孔和下轴孔。
5、进一步的,所述喷泵推进模块包括喷泵、喷泵进水口和喷泵出水口,所述喷泵固定在喷泵安装槽内,所述喷泵进水口和喷泵出水口位于所述下尾壳体的喷泵安装槽的后侧底部,喷泵进水口和喷泵出水口四周均使用有机硅密封胶进行密封。
6、进一步的,所述水平舵模块还包括左舵轴、左一齿轮左二齿轮、右舵轴、右一齿轮、右二齿轮、联轴器、防水舵机一、舵机一法兰连接件;所述防水舵机一固定安装在下尾壳体底部中间靠前区域,所述舵机一法兰连接件通过螺丝连接防水舵机一的舵盘;所述防水舵机一通过舵机一法兰连接件,使用螺丝螺母连接左一齿轮;所述左二齿轮位于左一齿轮后方并与左一齿轮啮合,所述左二齿轮与左舵轴、左水平舵为组合为一体的金属3d打印件,所述左舵轴一端从下尾壳体的左轴孔延伸进下尾壳体,且在所述左舵轴和左轴孔之间设有12mm轴承一;所述右舵轴一端从下尾壳体的右轴孔延伸进下尾壳体,所述右舵轴和左舵轴通过位于下尾壳体中间的联轴器连接以进行同轴心转动,所述右二齿轮位于右一齿轮后方并与右一齿轮啮合,所述右二齿轮与右舵轴、右水平舵为组合为一体的金属3d打印件,右一齿轮为从动齿轮,右一齿轮安装在下尾壳体右侧的从动轴上,右一齿轮中心台阶中嵌有12mm轴承二;其中左舵轴、右舵轴、舵机一法兰连接件均为d字轴结构,所述左一齿轮为d字槽齿轮。
7、进一步的,所述仿生尾鳍转向模块还包括d字轴、齿轮一、齿轮二、防水舵机二、舵机二法兰连接件;所述防水舵机二通过螺丝螺母固定安装在下尾壳体底部中间靠后区域,所述舵机二法兰连接件通过螺丝连接防水舵机二的舵盘;所述防水舵机二通过舵机二法兰连接件,使用螺丝螺母连接齿轮一;所述齿轮二位于齿轮一后方并与齿轮一啮合,所述齿轮二与d字轴、下尾鳍为组合为一体的金属3d打印件,所述d字轴一端从下尾壳体的下轴孔延伸进尾壳体下穿过上尾壳体的上轴孔;所述d字轴和下轴孔之间设有12mm轴承三,d字轴与上尾鳍通过螺丝螺母连接。
8、进一步的,所述舵机二法兰连接件为d字轴结构,所述齿轮一为d字槽齿轮。
9、进一步的,所述上尾鳍、下尾鳍、左水平舵、右水平舵均为naca0012翼型,上尾鳍和下尾鳍尾鳍形状均为新月形。
10、进一步的,所述控制模块中集成姿态传感器,控制模块根据姿态传感器数据对仿生尾鳍转向模块、水平舵模块进行控制。
11、一种使用仿生鳍及泵喷混合推进的水下机器人的控制方法,包括以下步骤:
12、步骤1:首先将仿生鳍及泵喷混合推进的水下机器人底面入水,此时机器人处于负浮力状态;
13、步骤2:上尾鳍逐渐浸于水中至完全浸没时,控制模块通过控制防水舵机二的转动从而控制上尾鳍以及下尾鳍,在将上下尾鳍调至中间位置后,在喷泵推进模式下控制模块将通过控制电路板启动喷泵,在仿生推进模式下控制模块将通过控制防水舵机二转动从而控制上尾鳍以及下尾鳍摆动,给机器人提供向前推力;
14、步骤3:在喷泵推进模式下,当机体需要转向时,控制模块通过控制防水舵机二转动从而控制上尾鳍以及下尾鳍转动角度,来流相对尾鳍产生攻角,在尾鳍水动力中心点上产生沿来流速度方向的阻力以及垂直于来流速度方向的升力,阻力与升力的合力提供机体转向所需的偏航力;
15、在仿生推进模式下,当机体需要转向时,控制模块通过控制防水舵机二转动使上尾鳍以及下尾鳍偏离中心轴线呈角度摆动,给机器人提供所需的偏航力;
16、步骤4:当机体需要上浮下潜时,控制模块通过控制防水舵机一转动从而控制左水平舵、右水平舵转动角度,来流相对水平舵产生攻角,在水平舵水动力中心点上产生沿来流速度方向的阻力以及垂直于来流速度方向的升力,阻力与升力的合力提供机体上浮下潜所需的力。
17、本发明具有以下优点:本发明的机器人进入水中后,有2种推进模式,在需要节约电量或者减少水下噪音时,将开启尾鳍仿生推进模式;在需要快速移动时,则开启喷泵推进模式,使机体能够快速到达目标地点,2种推进模式相互配合,使得该机体能够能适应多种工作环境。
18、在水下时,本发明的机器人通过控制防水舵机一、防水舵机二转动从而控制左水平舵、右水平舵、上尾鳍、下尾鳍转动一定角度,能够轻松地在三维空间内实现多自由度运动,并且具有很高的灵活性。
19、本发明将上尾鳍、下尾鳍均设计为naca0012翼型,尾鳍形状均为新月形,以减少阻力,提高水下机器人的水平机动性以及尾鳍推进模式时的速度,其中的舵机一法兰连接件、舵机二法兰连接件均为d字轴,以提供良好的转动力矩传递和精确的操作控制;以及其中的左一齿轮、齿轮一均为d字槽齿轮,以获得更好的传动效果,防止齿轮打滑。
20、本发明利用单一的齿轮传动机构同时满足了水下机器人多自由度运动所需的驱动方式,减少了整机重量,所有运动方式均由单一机构的变形实现,结构简单紧凑,实现了机器人的轻量化和小型化以及降低了水下机器人的制造成本。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226689.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表