一种全自由度的船用推进系统和控制方法与流程
- 国知局
- 2024-08-01 07:15:20
本发明涉及船舶自动驾驶技术和船舶控制,特别涉及一种全自由度的船用推进系统和控制方法。
背景技术:
1、目前越来越多的船只装备了自动驾驶系统,复杂的进出港动作和天气、水文条件给自动驾驶系统带来了挑战,本专利所述方法可以大幅简化船只的路线规划和控制,减少转向和加减速,提升船只灵活性和乘坐舒适性。
2、传统船只常用以下三种推进器布置方式:
3、1.使用一个或多个固定的推进器和舵面,推进器正反转控制船只前进或后退,舵面通常安装在船只尾部,控制船舶转向。2.使用一个或多个可旋转的矢量推进器,通常安装在船只尾部,推进器正反转控制船只前进或后退,推进器水平旋转控制船舶转向,所有推进器的方向相同。
4、3.使用多个推进器,固定安装在船只两侧,通过左右侧推进器的推力大小总和控制船只前后移动,通过左右侧推进器的推力大小差控制船只转向。
5、采用1、2两种方式推进的船只具有最小转弯半径,无法原地转向,无法侧向移动;采用第3种驱动方式驱动的船只虽然可以原地转向,但无法侧向移动。这些船只无法控制侧向的推进力,因此侧向移动时需要足够的空间进行复杂的转向,并且在有侧向风和水流的环境中很难保持位置。频繁而复杂的转向一方面给自动控制系统的设计带来很大的难度,另一方面也会降低船只的舒适性。
技术实现思路
1、为了解决现有技术的问题,本发明实施例提供了一种全自由度的船用推进系统和控制方法。所述技术方案如下:
2、一方面,提供了一种全自由度的船用控制方法,所述方法应用于一种船用推进系统,所述推进系统包括多个全回转推进器,其中,所述方法包括:
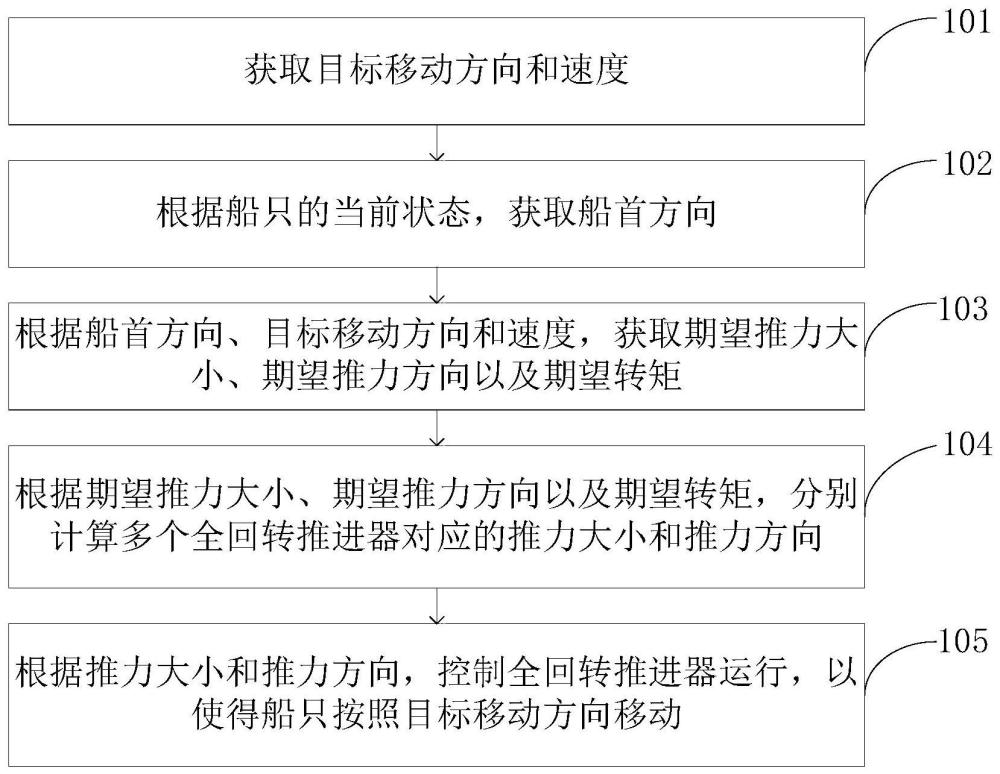
3、获取目标移动方向和速度;
4、根据船只的当前状态,获取船首方向;
5、根据所述船首方向、所述目标移动方向和速度,获取期望推力大小、期望推力方向以及期望转矩;
6、根据所述期望推力大小、所述期望推力方向以及所述期望转矩,分别计算所述多个全回转推进器对应的推力大小和推力方向;
7、根据所述推力大小和所述推力方向,控制全回转推进器运行,以使得船只按照所述目标移动方向移动。
8、可选的,所述根据所述期望推力大小、所述期望推力方向以及所述期望转矩,分别计算所述多个全回转推进器对应的推力大小和推力方向包括:
9、设置与船只对应的坐标系;
10、获取所述多个全回转推进器的安装位置,并计算所述安装位置在所述坐标系内的坐标;
11、在所述坐标系的基础上,根据所述期望推力大小、所述期望推力方向、所述期望转矩以及所述安装位置的坐标,分别计算所述多个全回转推进器对应的推力大小和推力方向。
12、可选的,所述根据所述推力大小和所述推力方向,控制全回转推进器运行,以使得船只按照所述目标移动方向移动包括:
13、根据所述推力大小以及所述全回转推进器的可输出最大推力大小,判断所述全回转推进器输出功率是否饱和;
14、若是,则重设置所述推力大小。
15、可选的,所述获取目标移动方向包括:
16、根据驾驶员自定义信息,获取目标移动方向。
17、可选的,所述根据船只的当前状态,获取船首方向包括:
18、获取磁罗经、gnss以及陀螺仪所监测的船只的当前状态;
19、根据所述船只的当前状态,获取所述船首方向。
20、另一方面,提供了一种全自由度的船用控制方法,所述方法应用于一种船用推进系统,所述推进系统包括多个全回转推进器,其中,所述方法包括:
21、获取目标移动方向和速度;
22、根据船只的当前状态,获取船首方向;
23、根据所述船首方向、所述目标移动方向和速度,获取期望推力大小、期望推力方向以及期望转矩;
24、获取所述多个全回转推进器的可输出最大推力;
25、根据所述期望推力、所述期望推力方向以及所述期望转矩,分别计算所述多个全回转推进器对应的推力和推力方向;
26、根据所述可输出最大推力,修正所述多个全回转推进器对应的推力和推力方向;
27、根据修正后的推力和修正后的推力方向,控制全回转推进器运行,以使得船只按照所述目标移动方向移动。
28、可选的,所述根据所述期望推力、所述期望推力方向以及所述期望转矩,分别计算所述多个全回转推进器对应的推力和推力方向包括:
29、设置与船只对应的坐标系;
30、获取所述多个全回转推进器的安装位置,并计算所述安装位置在所述坐标系内的坐标;
31、在所述坐标系的基础上,根据所述期望推力、所述期望推力方向、所述期望转矩以及所述安装位置的坐标,分别计算所述多个全回转推进器对应的推力和推力方向。
32、可选的,所述根据所述推力和所述推力方向,控制全回转推进器运行,以使得船只按照所述目标移动方向移动包括:
33、根据所述推力以及所述全回转推进器的可输出最大推力,判断所述全回转推进器输出功率是否饱和;
34、若是,则重设置所述推力。
35、可选的,所述获取目标移动方向包括:
36、根据驾驶员自定义信息,获取目标移动方向。
37、可选的,所述根据船只的当前状态,获取船首方向包括:
38、获取磁罗经、gnss以及陀螺仪所监测的船只的当前状态;
39、根据所述船只的当前状态,获取所述船首方向。
40、另一方面,提供了一种全自由度的船用推进系统,所述船用推进系统包括多个全回转推进器,所述系统还包括处理装置,所述处理装置具体用于:
41、获取目标移动方向和速度;
42、根据船只的当前状态,获取船首方向;
43、根据所述船首方向、所述目标移动方向和速度,获取期望推力大小、期望推力方向以及期望转矩;
44、根据所述期望推力大小、所述期望推力方向以及所述期望转矩,分别计算所述多个全回转推进器对应的推力大小和推力方向;
45、根据所述推力大小和所述推力方向,控制全回转推进器运行,以使得船只按照所述目标移动方向移动。
46、可选的,所述处理装置具体用于:
47、设置与船只对应的坐标系;
48、获取所述多个全回转推进器的安装位置,并计算所述安装位置在所述坐标系内的坐标;
49、在所述坐标系的基础上,根据所述期望推力大小、所述期望推力方向、所述期望转矩以及所述安装位置的坐标,分别计算所述多个全回转推进器对应的推力大小和推力方向。
50、可选的,所述处理装置具体用于:
51、根据所述推力大小以及所述全回转推进器的可输出最大推力大小,判断所述全回转推进器输出功率是否饱和;
52、若是,则重设置所述推力大小。
53、可选的,所述系统还包括磁罗经、gnss以及陀螺仪中的至少一个;
54、所述磁罗经、gnss以及陀螺仪用于获取所述船只的当前状态。
55、本发明实施例提供的技术方案带来的有益效果是:
56、通过在船只上安装至少两个全回转推进器,通过求解动力学方程计算每个推进器应该输出的推力大小和方向,从而控制船只受到的反作用力和力矩,进而实现船只可以以任意船首方向、向任意方向移动。解决传统船只转弯半径大、移动不灵活、进出港动作复杂、易受侧向风和水流影响的问题。大幅降低自动驾驶系统设计难度,提高船只的舒适性。解决了船只在自动驾驶系统场景下,复杂的进出港动作,可以大幅简化船只的路线规划和控制,减少转向和加减速,提升舒适性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226746.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。