一种小型太阳能驱动无人遥控被动式水面漂浮物自动清洁打包船的制作方法
- 国知局
- 2024-08-01 07:17:39
本技术涉及清洁装置,更具体地说,它涉及一种小型太阳能驱动无人遥控被动式水面漂浮物自动清洁打包船。
背景技术:
1、地表河湖受陆源营养及垃圾输入、内源污染恶化现象影响,水面垃圾、水绵等漂浮物增多,水体氮磷失衡,水体富营养化程度趋于恶化,特别是城市内河尤为显著,需要进行人为干涉,先行通过人工抄网打捞、机械船舶主动式传送打捞等物理方式去除水体漂浮物,配合后续化学工程、生态修复措施改良水体环境,恢复水生态自净能力。
2、为了解决上述问题,中国专利(专利公开号:cn110015382a)公布了一种自动水面漂浮物清洁船,包括船体、船桨和发动机二号,船体内部设有蓄电池、微型控制器、输水管和发动机二号,蓄电池分别和发动机一号、发动机二号电连接,微型控制器分别和发动机一号、发动机二号电连接,输水管上设有抽水泵,输水管位于船体外的一段上设有搅碎机,输水管的另一端设有含漂浮物污水排水口,船体的上端面上设有滤网传送带、漂浮物收集池和排水斜坡,滤网传送带和发动机一号传动连接,船体的甲板上安装太阳能板,太阳能板和蓄电池电连接。
3、上述方案实现了对水面漂浮的垃圾和藻类的收集和清洁,含漂浮物的水体经过完整的过滤流程后,漂浮物清洁率超过99%;但该一种自动水面漂浮物清洁船仍存在一些缺陷:一是现有打捞模式能耗高,船体装载能力有限,打捞不彻底,打捞过程中人力需求量大,投入成本大,且船体体量相对较大,对小型城市内河不适用。
技术实现思路
1、本实用新型的目的是提供一种小型太阳能驱动无人遥控被动式水面漂浮物自动清洁打包船,以解决现有技术中打捞模式能耗高,船体装载能力有限,打捞不彻底,打捞过程中人力需求量大,投入成本大等问题。
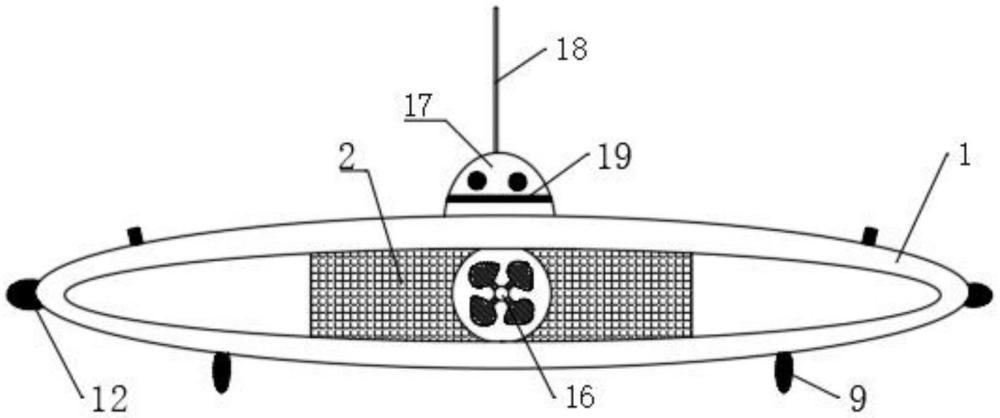
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种小型太阳能驱动无人遥控被动式水面漂浮物自动清洁打包船,包括船体基础模块、船体能源模块、船体动力模块、自动收集模块、遥控监测模块;所述船体基础模块包括船体;
3、所述自动收集模块包括金刚高透网、网兜、按压式阻轮、塑料制板、上下双层滑轨、助推伸缩杆、挂杆;所述金刚高透网设置于所述船体前侧中心进水通道向内至所述船体中心,所述金刚高透网设置有前端固定,后端活动的单向向下的塑料制板,所述网兜设置于所述金刚高透网的端部,所述按压式阻轮设置于靠近所述网兜开口处的端部,所述上下双层滑轨设置于所述塑料制板的底部,所述上下双层滑轨包括穿网轨道层和推进杆轨道层,所述挂杆设置于穿网轨道层的侧壁,所述助推伸缩杆设置于推进杆轨道层。
4、通过采用上述技术方案,本实用新型的船体基础模块是整个船体的基本结构,提供船体的稳定性和承载能力,可以根据实际需要设计不同形状和尺寸的船体,该装置采用太阳能作为主要能源,通过安装在船体上的太阳能电池板,将太阳能转化为电能,用于船体其他模块的运行,该装置由助推伸缩杆、挂杆和上下双层滑轨组成,助推伸缩杆通过前后滑动,驱动挂杆和滑轨,实现收集满载网兜的推进和释放;
5、自动收集模块由金刚高透网、网兜、按压式阻轮、塑料制板和滑轨组成,金刚高透网设置在船体前侧中心进水通道,阻拦漂浮物进入船体。网兜安置于金刚高透网的末端,用于收集漂浮物。按压式阻轮靠近网兜开口处,防止网兜中的漂浮物逆流回船体,上下双层滑轨由穿网轨道层和推进杆轨道层组成,用于推动网兜和完成收集动作,该模块使用无线遥控技术,可以实现对船体的远程监测和操控,通过操控遥控器或者其他设备,可以控制船体的运行状态、清洁作业以及收集网兜的释放,这样本实用新型解决了传统打捞模式中能耗高、装载能力有限、打捞不彻底、人力需求量大和投入成本高的问题,该船体具备自动清洁和打包漂浮物的功能,通过太阳能驱动和无人遥控技术的应用,实现了低能耗、高效率的水面清洁作业。
6、本实用新型进一步设置为:所述船体的底部设置有实心橡胶车轮,所述船体的底部中空设置,所述船体的顶部前端设置有牵引环,所述船体的顶部两侧设置有固定提手,所述船体的左右外延设置有防撞橡胶条且设置有等深吃水线,所述船体的侧壁设置有外接固定孔,用于其他模块安装。
7、通过采用上述技术方案,本实用新型的船体底部设计了实心橡胶车轮,用于提供船体在水面上的平稳移动和操控,船体底部中空设置,可以降低船体的总重量,提高浮力和敏捷性,船体顶部前端设置了牵引环,方便在需要的时候进行牵引或连接其他设备,船体顶部两侧设置固定提手,方便搬运和操作船体,船体左右外延设置防撞橡胶条,可保护船体不受碰撞损害,并且设置等深吃水线,使船体在水面上保持稳定的航行状态,船体侧壁设置外接固定孔,用于安装其他模块,增强船体的功能和应用灵活性。
8、本实用新型进一步设置为:所述船体能源模块包括太阳能电池板、储能电池、电线、控制线集成;
9、所述太阳能电池板设置于所述船体顶部,所述储能电池设置于所述船体顶部,所述电线、控制线集成设置于所述船体顶部的内部,所述太阳能电池板设置于所述电线、控制线集成的顶面。
10、通过采用上述技术方案,本实用新型进一步完善了船体能源模块的布局和设计,太阳能电池板的设置在船体顶部可以最大化地吸收阳光,提供稳定的太阳能供电。储能电池的设置能够储存电能,并在需要的时候释放,确保船体的持续工作,电线和控制线集成的设置能够简化线缆布局,提高系统的可靠性和安全性,本实用新型的船体能源模块更加高效和便捷,提供了可靠的能源供应和控制管理。
11、本实用新型进一步设置为:所述船体动力模块包括螺旋桨模块;
12、所述螺旋桨模块与所述船体能源模块电性连接,所述螺旋桨模块设置于所述船体的内部。
13、通过采用上述技术方案,本实用新型进一步完善了船体的动力模块,增加了螺旋桨模块来提供推进力。螺旋桨模块通过与船体能源模块电性连接,利用所提供的电能来驱动螺旋桨,从而推动船体在水面上移动。螺旋桨模块设置在船体内部,有助于减少外部结构的干扰,提高船体的整体性能和效率,本实用新型的船体动力模块能够更加稳定和可靠地提供动力,实现船体的自主推进和操作。
14、本实用新型进一步设置为:所述遥控监测模块包括可旋转摄像头、感应天线、控制集成电路板、遥控器本体;
15、所述可旋转摄像头与所述感应天线均设置于所述船体顶部,所述控制集成电路板设置于所述可旋转摄像头的内部,所述遥控器本体集成储存、摄像、拍照、屏显、方向操控、网兜收发等功能。
16、通过采用上述技术方案,本实用新型进一步完善了遥控监测模块。可旋转摄像头和感应天线的设置使船体能够进行全方位的监测和感应,提供更准确的信息反馈。控制集成电路板的设置使得控制操作更加简捷和精确,遥控器本体的集成功能提供了更多的操作选项和应用场景,使得船体的遥控监测更加便捷和多样化,本实用新型的遥控监测模块能够更好地满足用户的需求,提供更高效的操作体验和监测能力。
17、本实用新型进一步设置为:所述网兜的开口处设置有束口绳,所述束口绳的端部设置有大环悬挂于所述船体的后侧中轴线收集轨道,所述网兜的开口处还设置有铁质环,所述铁质环设置于所述穿网轨道层。
18、通过采用上述技术方案,本实用新型的网兜设计更加方便实用,束口绳的设置可以根据需要控制网兜的开合程度,提供灵活性和可控性,大环悬挂于船体后侧中轴线收集轨道上,使得网兜的运行更加顺畅和稳定,铁质环的设置能够确保网兜开口的形状和位置稳定,提高网兜的抓捕效果和捕获物的存储稳定性,本实用新型的网兜具备更好的操作性和捕获效果,适用于各种捕捞和捕获任务。
19、本实用新型进一步设置为:所述遥控器本体的表面自左向右依次设置有打包键、显示屏和方向键,所述遥控器本体的侧壁自左向右依次设置有录像键、储存卡安放点、可折叠式感应天线和拍照键。
20、通过采用上述技术方案,本实用新型的遥控器本体具备了更多的功能和操作选项,表面的打包键、显示屏和方向键,以及侧壁的录像键、储存卡安放点、感应天线和拍照键,提供了更丰富的操作和监测体验,用户可以通过遥控器直观地控制船体的运动方向和操作功能,同时可以实时查看和记录船体的数据和图像信息,本实用新型的遥控器本体更加智能化和便捷性,提供了更优质的操作和监测体验。
21、综上所述,本实用新型具有以下有益效果:
22、1.本实用新型对现有水面漂浮物打捞船进一步改良。探索降低能耗的被动收集方式,用机械涡轮转动的后排前驱水动力带动漂浮物收集速度;用完全清洁太阳能代替化石能源,减少作业过程潜在的含油污水的产生;用下挂拖拽网袋自动打包方式,代替船载式脱水后人工装卸;
23、2.本实用新型用加密金刚网拦截水面漂浮物,借助低切入角度通过水流完成网具表层冲洗,下覆塑料质挡板阻逆漂浮物的方式,代替主动式传送带转动过程中对水面漂浮物打捞不彻底、水体扰动大的问题,特别是小微型物体极易吸附在传送带表面,无法实现自动脱离;用遥控或路径编程方式,代替人工驾驶及设备操控,降低水面清洁投入成本、水面作业安全事故概率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/226952.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种内陆水面用光伏浮体
下一篇
返回列表