一种姿态浮力调节解耦的水下机器人及其姿态调节方法
- 国知局
- 2024-08-01 07:19:47
本发明涉及水下机器人,具体是涉及一种姿态浮力调节解耦的水下机器人及其姿态调节方法。
背景技术:
1、水下机器人凭借其自动化、高效率、集群化等特点得到广泛的青睐,成为水下勘探工作的重要工具。对于水下作业机器人进行作业时,对于机器人本身的姿态调节和浮力调节较为重要,绝大多数水机器人只能单独地调节浮力或者姿态,能够同时调节姿态和浮力的水下机器人又难以实现浮力和姿态的精准控制。
2、现有技术中,如申请号为202310007368.x的中国专利申请,公开了一种分段式模块化水下机器人,其主要包括推进段、俯仰和浮力调节舱段、电池组舱段和观测舱段,一定程度上解决了续航问题,但其水下机器人不具备自主升沉能力的技术问题。又如,申请号为202310836013.1的中国专利申请,其将浮力材料放置在浮筒内,每次调节浮力都需要重新调整浮力材料位置和数量,在浮力调整和姿态调节时操作过于复杂。又如申请号为202111246285.3的中国专利申请,其智能水下机器人主要实现上升和下沉,左右以及前后的简单运动,实现了水下无线电充电,增加了续航能力,但并没有考虑复杂状态的姿态调节。
技术实现思路
1、发明目的:针对以上问题,本发明提供一种操作简单的姿态浮力调节解耦的水下机器人。
2、本发明还提供一种由上述水下机器人的姿态调整方法。
3、技术方案:为解决上述问题,本发明采用一种姿态浮力调节解耦的水下机器人,包括控制舱模块、用于为水下机器人提供动力的推进模块、艏部调节模块和尾部调节模块,所述艏部调节模块和尾部调节模块分别位于控制舱模块两端,且艏部调节模块和尾部调节模块的结构相同,所述艏部调节模块包括姿态调节系统和浮力调节系统,所述浮力调节系统包括外油缸,所述外油缸设置于水下机器人的中轴线,且外油缸充入或排出液体,调整水下机器人浮力,所述姿态调节系统包括配重物、驱动电机、固定套设于外油缸外的环形齿轨,所述驱动电机与配重物固定连接,驱动电机通过齿轮组件驱动配重物沿环形齿轨移动,改变水下机器人重心位置,调整水下机器人姿态。
4、进一步的,所述姿态调节系统还包括套设于外油缸外的环形滚轨、配重物底车和设置于配重物底车上的滚轮,所述驱动电机和配重物固定连接于配重物底车上,所述滚轮沿环形滚轨移动。
5、进一步的,所述浮力调节系统还包括固定连接于配重物底车上的底车固定架、若干内油缸和液压驱动组件,所述底车固定架套设于外油缸外,若干内油缸固定于底车固定架上,且绕外油缸周向均匀分布,所有内油缸均设置于环形舱内,所述液压驱动组件将外油缸中的驱动油液均匀压入内油缸,外油缸活塞向内收缩充入液体;所述液压驱动组件将内油缸中的驱动油液压入外油缸,外油缸活塞向外挤压排出液体。
6、进一步的,所述底车固定架固定连接有环形管道,且环形管道与底车固定架同轴,所述内油缸通过内油缸油管均与环形管道连通。
7、进一步的,所述液压驱动组件包括液压驱动电机、柱塞泵、左截止式电磁阀、左板式单向阀、右截止式电磁阀和右板式单向阀,所述左截止式电磁阀和左板式单向阀通过软管与环形管道连通,用于调节内油缸的油量;所述右截止式电磁阀和右板式单向阀)与外油缸连通,用于调节外油缸的油量;所示柱塞泵两端分别通过三通接头与左截止式电磁阀和左板式单向阀以及右截止式电磁阀与右板式单向阀)连通,液压驱动电机驱动柱塞泵工作。所述液压驱动组件设置于液压舱内,液压舱两端对称设置两个外油缸。
8、进一步的,水下机器人还包括艏部侧推模块、尾部侧推模块、尾推进器模块,所述艏部侧推模块位于艏部调节模块和控制舱模块之间,所述尾部侧推模块位于尾部调节模块和控制舱模块之间,所述艏部侧推模块和尾部侧推模块用于调节水下机器人整体横移方向和艏向方向,所述尾推进器模块设置于尾部调节模块的末端,用于驱动水下机器人轴向运动。
9、本发明还提供一种用于上述水下机器人的姿态调节方法,包括以下步骤:
10、步骤1:以水下机器人的几何中心为原点建立固定坐标系和载体坐标系、艏部调节模块的几何中心为原点建立第一坐标系、以尾部调节模块的几何中心为原点建立第二坐标系、以机械臂底座为原点建立第三坐标系、以机械臂末端执行器为原点建立第四坐标系;
11、步骤3:计算固定坐标系和载体坐标系之间的齐次变换矩阵,并分别计算第一坐标系、第二坐标系、第三坐标系和第四坐标系和载体坐标系之间的齐次变换矩阵,得到水下机器人各参数在固定坐标系中的位置关系式;根据水下机器人的受力情况得到水下机器人的平衡方程;
12、步骤4:确定水下机器人的调整姿态;根据平衡方程计算得到调节参数;
13、步骤5:根据得到的调节参数调整水下机器人的姿态。
14、进一步的,所述水下机器人各参数包括水下作业机器人重心pg0、浮心pb0、艏部调节模块的浮心o1、艏部调节模块配重物重心pg1、尾部调节模块的浮心o2、尾部调节模块配重物重心pg2、作业机械臂末端ow。
15、进一步的,所述水下机器人的调整姿态包括横摇和纵摇,当调整水下机器人人横摇时,确定水下机器人的横摇角度,根据平衡方程得到配重物转动角度;当调整水下机器人纵摇时,确定水下机器人的纵摇角度,根据平衡方程分别得到艏部调节模块和尾部调节模块提供的浮力。
16、有益效果:本发明相对于现有技术,其显著优点是艏部调节模块和尾部调节模块既可以调节姿态也可以调节浮力,且在调节姿态的过程中可以保持浮力不变,在调节浮力的过程中可以保持姿态不变,实现姿态、浮力的解耦调节。通过环形舱内配重在车沿着环形齿轨做圆周运动,可以改变调节模块重心位置调整水下作业机器人横滚姿态,由于在调节重心位置的过程中,不涉及油液的输送,所以能够实现在调节姿态的过程中可以保持浮力不变。
17、液压舱内的液压元件可以将外油缸内的油液输送到内油缸中,从而减小浮力,外油缸位于调节模块中央,而所有内油缸均布在环形舱圆周上,且所有内油缸都安装有弹性系数相同的复位弹簧,所以,当外油缸中的油液进入均匀进入各个内油缸时,油液的质心还在调节模块的中央,质心位置不变,所以,能够实现在调节浮力的过程中可以保持姿态不变。
18、相比于现有技术中通常采用移动质量块的方式实现姿态调节,需要将质量块整个行程都预留出空间,本发明在水下作业机器人艏、尾各安装一个调节模块,通过差动调节两个调节模块的浮力,进而实现水下作业机器人的俯仰姿态,不用预留质量块的行程空间,而且充分利用了水下作业机器人的纵向长度,俯仰力矩较大,水下作业机器人越呈细长形状,俯仰姿态调节效果越好,节省的空间越大。
19、主要的电子元件主要放置于控制舱模块内,自成体系且空利用率高,艏部和尾部调节模块独立控制,当水下作业机器人局部发生故障时,能通过调节模块调整较大的浮力,便于上岸检修。水下作业机器人整体呈成流线型,最小化表面对水流的干扰,执行任务过程中降低能耗。
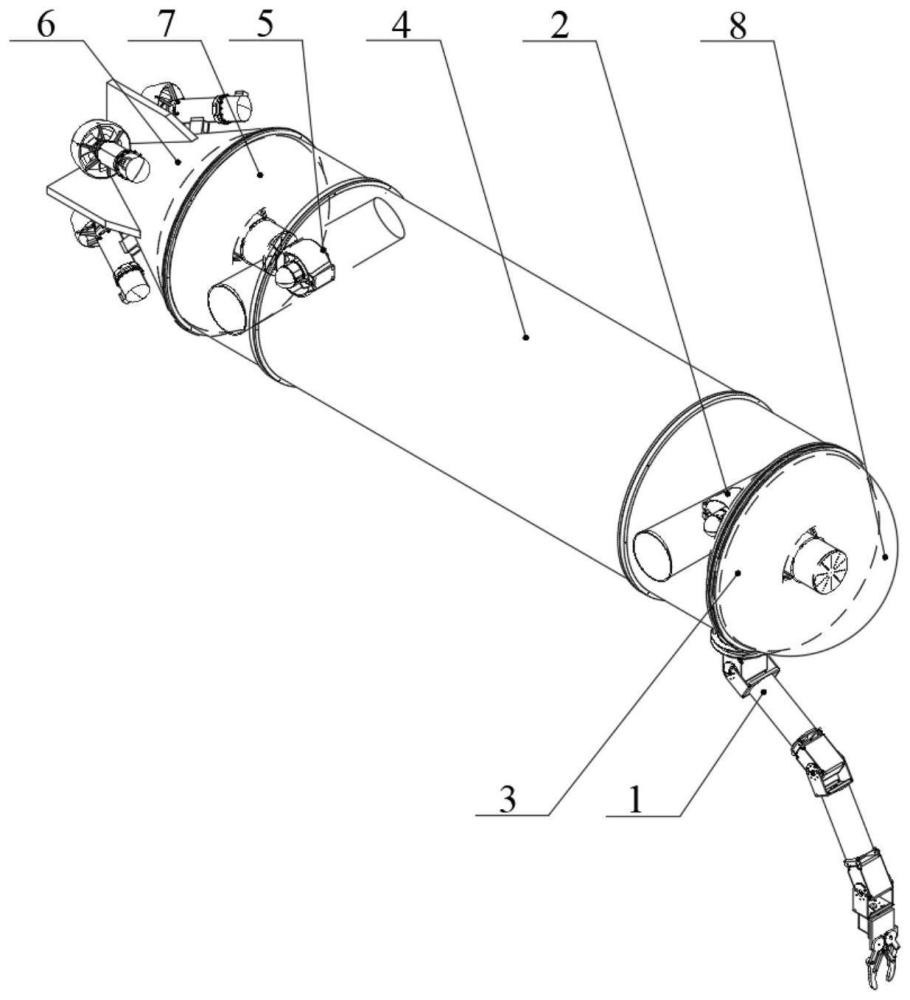
技术特征:1.一种姿态浮力调节解耦的水下机器人,其特征在于,包括控制舱模块(4)、用于为水下机器人提供动力的推进模块、艏部调节模块(3)和尾部调节模块(6),所述艏部调节模块(3)和尾部调节模块(6)分别位于控制舱模块(4)两端,且艏部调节模块(3)和尾部调节模块(6)的结构相同,所述艏部调节模块(3)包括姿态调节系统和浮力调节系统,所述浮力调节系统包括外油缸(11),所述外油缸(11)设置于水下机器人的中轴线,且外油缸(11)充入或排出液体,调整水下机器人浮力,所述姿态调节系统包括配重物(13)、驱动电机(147)、固定套设于外油缸(11)外的环形齿轨(16),所述驱动电机(147)与配重物(13)固定连接,驱动电机(147)通过齿轮组件(18)驱动配重物沿环形齿轨(16)移动,改变水下机器人重心位置,调整水下机器人姿态。
2.根据权利要求1所述的水下机器人,其特征在于,所述姿态调节系统还包括套设于外油缸(11)外的环形滚轨(17)、配重物底车(14)和设置于配重物底车(14)上的滚轮(155),所述驱动电机(147)和配重物(13)固定连接于配重物底车(14)上,所述滚轮(155)沿环形滚轨(17)移动。
3.根据权利要求2所述的水下机器人,其特征在于,所述浮力调节系统还包括固定连接于配重物底车(14)上的底车固定架(192)、若干内油缸(149)和液压驱动组件,所述底车固定架(192)套设于外油缸(11)外,若干内油缸(149)固定于底车固定架(192)上,且绕外油缸(11)周向均匀分布,所有内油缸均设置于环形舱(9)内,当外油缸(11)充入液体时,所述液压驱动组件将外油缸(11)中的驱动油液均匀压入内油缸(149);当外油缸(11)排出液体时,所述液压驱动组件将内油缸(149)中的驱动油液压入外油缸(11)。
4.根据权利要求3所述的水下机器人,其特征在于,所述底车固定架(192)固定连接有环形管道(1012),且环形管道(1012)与底车固定架(192)同轴,所述内油缸(149)通过内油缸油管(108)均与环形管道(1012)连通。
5.根据权利要求4所述的水下机器人,其特征在于,所述液压驱动组件包括液压驱动电机(103)、柱塞泵(104)、左截止式电磁阀(105)、左板式单向阀(106)、右截止式电磁阀(109)和右板式单向阀(1010),所述左截止式电磁阀(105)和左板式单向阀(106)通过软管(101)与环形管道(1012)连通,用于调节内油缸(149)的油量;所述右截止式电磁阀(109)和右板式单向阀(1010)与外油缸(11)连通,用于调节外油缸(11)的油量;所示柱塞泵(104)两端分别通过三通接头(1011)与左截止式电磁阀(105)和左板式单向阀(106)以及右截止式电磁阀(109)与右板式单向阀(1010)连通,液压驱动电机(103)驱动柱塞泵(104)工作。
6.根据权利要求5所述的水下机器人,其特征在于,所述液压驱动组件设置于液压舱(10)内,液压舱(10)两端对称设置两个外油缸(11)。
7.根据权利要求6所述的水下机器人,其特征在于,还包括艏部侧推模块(2)、尾部侧推模块(5)、尾推进器模块(7),所述艏部侧推模块(2)位于艏部调节模块(3)和控制舱模块(4)之间,所述尾部侧推模块(5)位于尾部调节模块(6)和控制舱模块(4)之间,所述艏部侧推模块(2)和尾部侧推模块(5)用于调节水下机器人整体横移方向和艏向方向,所述尾推进器模块(7)设置于尾部调节模块(6)的末端,用于驱动水下机器人轴向运动。
8.一种用于权利要求1所述水下机器人的姿态调节方法,其特征在于,包括以下步骤:
9.根据权利要求8所述的姿态调节方法,其特征在于,所述水下机器人各参数包括水下作业机器人重心g0、浮心b0、艏部调节模块的浮心o1、艏部调节模块配重物重心g1、尾部调节模块的浮心o2、尾部调节模块配重物重心g2、作业机械臂末端ow。
10.根据权利要求9所述的姿态调节方法,其特征在于,所述水下机器人的调整姿态包括横摇和纵摇,当调整水下机器人横摇时,确定水下机器人的横摇角度,根据平衡方程得到配重物转动角度;当调整水下机器人纵摇时,确定水下机器人的纵摇角度,根据平衡方程分别得到艏部调节模块和尾部调节模块提供的浮力。
技术总结本发明公开了一种姿态浮力调节解耦的水下机器人,包括控制舱模块、推进模块、艏部调节模块和尾部调节模块,艏部调节模块和尾部调节模块分别位于控制舱模块两端,且结构相同,艏部调节模块包括姿态调节系统和浮力调节系统,浮力调节系统包括外油缸,外油缸充入或排出液体,调整水下机器人浮力,姿态调节系统包括配重物、驱动电机、固定套设于外油缸外的环形齿轨,驱动电机与配重物固定连接,驱动电机通过齿轮组件驱动配重物沿环形齿轨移动,改变水下机器人重心位置,调整水下机器人姿态。艏部调节模块和尾部调节模块在调节姿态的过程中可以保持浮力不变,在调节浮力的过程中可以保持姿态不变,实现姿态、浮力的解耦调节。技术研发人员:殷宝吉,陆杰,张建,马世昌,齐继阳,吴婧,任静兰,王子贤受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/227128.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表