一种框架结构有缆遥控水下机器人
- 国知局
- 2024-08-01 07:19:56
本技术涉及水下机器人,特别是涉及一种框架结构有缆遥控水下机器人。
背景技术:
1、有缆遥控水下机器人(rov)技术能够取代人员在危险的水下进行作业,在海事调查、航道清障、水下搜救、油污观测等领域都有广泛的应用。
2、传统框架型rov中的电子舱在框架上的固定位置唯一,导致传统rov无法调节该装置的重心、浮心位置,使得rov无法根据需要调整重心、浮心,以便更高效的作业。
3、基于此,如何提供一种框架结构有缆遥控水下机器人,使其能够根据需要调整水下机器人的重心、浮心,以便其能够更加高效的作业是本领域技术人员亟需解决的技术问题。
技术实现思路
1、本实用新型的目的在于针对现有技术中的缺陷和不足,提供一种框架结构有缆遥控水下机器人,通过调整电子舱在上托板上的固定位置,和/或调整电池舱在下托板上的固定位置,进而在将电子舱固定在上托板上和/或将电池舱固定在下托板上的同时,能够根据需要灵活地调整水下机器人的重心、浮心,使得rov拥有更好的环境适应能力,能够适应更加复杂的作业环境,以便其能够更加高效的作业。
2、为实现上述目的,本实用新型采用的技术方案是:
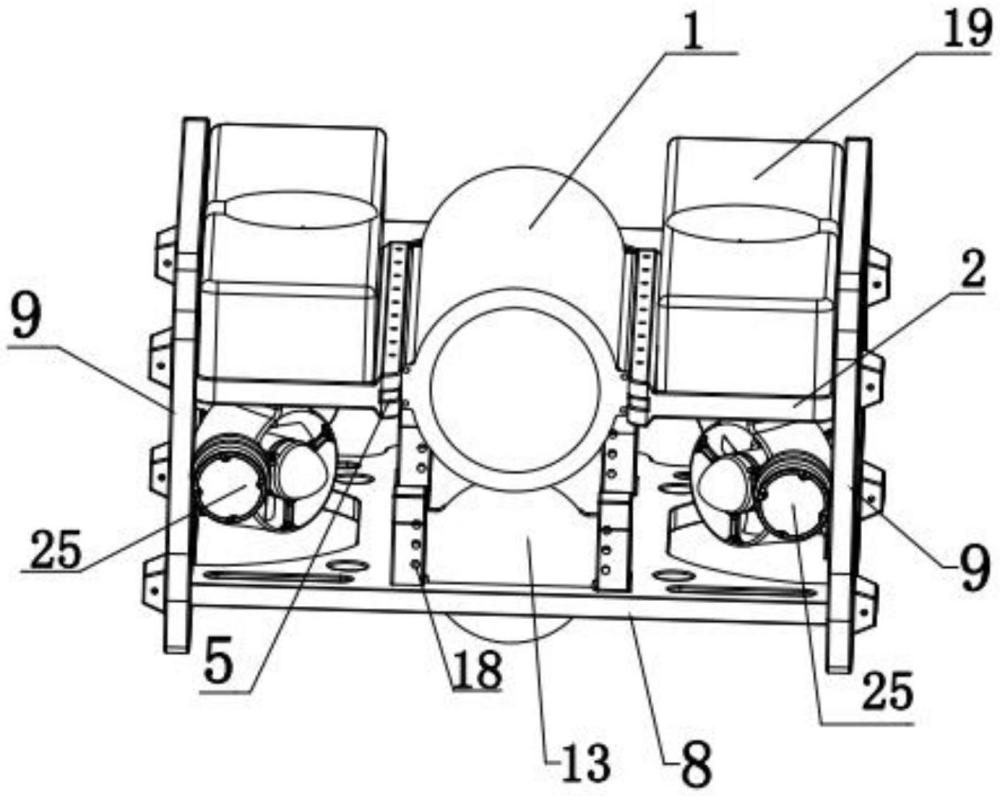
3、本实用新型提供一种框架结构有缆遥控水下机器人,包括电子舱和上托板,所述上托板上设有用于容纳所述电子舱的第一空腔,所述电子舱的径向两端设有电子舱卡榫头或电子舱卡榫槽,所述第一空腔的内壁上与所述电子舱卡榫头位置相对处设有电子舱卡榫槽或所述第一空腔的内壁上与所述电子舱卡榫槽位置相对处设有电子舱卡榫头,所述电子舱卡榫头滑动设置在所述电子舱卡榫槽内,所述电子舱卡榫头上设有第一安装孔,所述电子舱卡榫槽上设有间隔分布的第二安装孔,所述第一安装孔与不同位置的所述第二安装孔相连接,以调整所述电子舱在所述上托板上的固定位置;
4、和/或所述上托板的下部设有下托板,所述上托板和所述下托板的左右两侧分别设有侧板,所述上托板和所述下托板分别与所述侧板可拆卸连接;
5、所述下托板上设有用于安装电池舱的第二空腔,所述电池舱的径向两端分别设有电池舱卡榫头或电池舱卡榫槽,所述第二空腔的侧壁上与所述电池舱卡榫头位置相对处设有电池舱卡榫槽,或所述第二空腔的侧壁上与所述电池舱卡榫槽位置相对处设有电池舱卡榫头,所述电池舱卡榫头滑动设置在所述电池舱卡榫槽内,所述电池舱卡榫头上设有第三安装孔,所述电池舱卡榫槽上设有间隔分布的第四安装孔,螺纹连接件分别穿过所述第三安装孔和不同位置的所述第四安装孔,以将所述电池舱固定在所述下托板上的不同位置。
6、优选地,所述第一安装孔为沿厚度方向贯穿所述电子舱卡榫头的螺纹通孔,所述第二安装孔为沿厚度方向贯穿所述电子舱卡榫槽侧壁的螺纹通孔,螺栓依次穿过所述第一安装孔和不同位置的所述第二安装孔,以将所述电子舱固定设置在所述上托板上的不同位置。
7、优选地,所述电子舱卡榫头上设有若干间隔分布的所述第一安装孔,调整所述电子舱卡榫头上与所述第二安装孔相连接的所述第一安装孔的位置,以调整所述电子舱在所述上托板上的固定位置。
8、优选地,所述第三安装孔为沿厚度方向贯穿所述电池舱卡榫头的螺纹通孔,所述第四安装孔为沿厚度方向贯穿所述电池舱卡榫槽侧壁的螺纹通孔,螺栓依次穿过所述第三安装孔和不同位置的所述第四安装孔,以将所述电子舱固定设置在所述上托板上的不同位置。
9、优选地,所述电池舱与所述电子舱的轴线平行,且所述电池舱位于所述电子舱的下部,所述电子舱卡榫头和所述电子舱卡榫槽的长度方向沿所述电子舱的轴线,所述电池舱卡榫头和所述电池舱卡榫槽的长度方向沿所述电池舱的径向,所述电池舱卡榫头位于所述电池舱的两端面处。
10、优选地,所述上托板上设有上托板卡榫头,所述下托板上设有下托板卡榫头,所述侧板上与所述上托板卡榫头和所述下托板卡榫头位置相对处设有侧板卡榫槽,所述上托板卡榫头和所述侧板卡榫槽通过螺栓可拆卸连接,所述下托板卡榫头和所述侧板卡榫槽通过螺栓可拆卸连接。
11、优选地,所述上托板位于所述第一空腔左右两侧的部分分别安装有浮力块,所述浮力块与所述上托板可拆卸连接。
12、优选地,所述上托板上设有推进器卡榫头或推进器卡榫槽,所述推进器卡榫头或所述推进器卡榫槽位于所述浮力块的下部,或所述浮力块以及所述上托板的中部设有用于容纳推进器的第三空腔,所述推进器卡榫头或所述推进器卡榫槽位于所述第三空腔的侧壁上,所述推进器上设有所述推进器卡榫槽或所述推进器卡榫头,所述推进器卡榫槽和所述推进器卡榫头通过螺栓固定连接。
13、优选地,所述上托板上设有推进器卡榫头或推进器卡榫槽,所述推进器卡榫头或所述推进器卡榫槽位于所述浮力块的下部,或所述浮力块以及所述上托板的中部设有用于容纳推进器的第三空腔,所述推进器卡榫头或所述推进器卡榫槽位于所述第三空腔的侧壁上,所述推进器上设有所述推进器卡榫槽或所述推进器卡榫头,所述推进器卡榫槽和所述推进器卡榫头通过螺栓固定连接。
14、优选地,所述侧板上安装有照明装置,所述照明装置和所述侧板螺栓连接。
15、优选地,所述侧板的上边缘超出所述浮力块的顶面,所述侧板的下边缘超出所述电池舱的底面。
16、本实用新型相对于现有技术取得了以下技术效果:
17、1、本实用新型将电子舱以可拆卸的方式固定在上托板上,和/或将电池舱以可拆卸的方式固定在下托板上,通过调整电子舱在上托板上的固定位置,和/或调整电池舱在下托板上的固定位置,进而在将电子舱固定在上托板上和/或将电池舱固定在下托板上的同时,能够根据需要灵活地调整水下机器人的重心、浮心,使得rov拥有更好的环境适应能力,能够适应更加复杂的作业环境,以便其能够更加高效的作业。
18、本实用新型的其他技术方案还能够取得以下技术效果:
19、2、本技术的上托板、下托板与侧板之间,电子舱与上托板之间、电池舱与下托板之间、推进器与上托板之间均采用榫卯联接和螺栓联接相结合的方式,榫卯联接结构强度高、定位方便,螺栓联接适用于需经常拆卸的场合,且螺栓联接能够有效的提升框架连接装置强度、避免滑丝,两者相结合的固定方式,能够有效提升rov的整体强度,提高设备的可靠性,减少水下运动阻力、重力、震动、碰撞挤压等作用造成的滑丝等一系列损伤;而且该装置具备模块化组装能力,可以在母船、岸边等简易环境下对推进器、电池舱、电子舱、照明灯等模块进行拆解维护保养,极大地提升了维护便捷性。
20、3、本技术通过增大侧板的轮廓,使得框架可以对rov内的电子设备提供全方位的保护,避免在岸边、母船等作业环境因操作不慎导致rov落水时,损伤零部件,使得该装置拥有从岸边或母船吊装入水的功能,可以无人机搭载使用或从母船上直接抛投入水使用,拓宽了该装置的适用范围。
21、4、传统的rov各个零件相互覆盖包裹,例如电子舱出现故障时,需要先将浮力块、侧板、上托板等全部拆掉才可以修理电子舱,修理时间长且繁琐。本技术的rov中各个零部件的安装位置相互无遮挡,若电子舱、电池舱或推进器等电子部件出现故障,可以仅拆除出现故障的零部件,提升了维修效率,使该装置具备更好的人机功效,降低了操作人员的门槛,对操作员进行简单培训,就可以进行正常作业和维护。
本文地址:https://www.jishuxx.com/zhuanli/20240722/227136.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表