一种巡检与排险机器人轮足式移动平台
- 国知局
- 2024-08-01 07:35:05
本发明涉及机器人移动平台,具体涉及一种巡检与排险机器人轮足式移动平台。
背景技术:
1、目前,化工企业需要定期对相关设备装置以及管线进行巡检和快速排线,由于设备装置的结构以及管线布局的设计,导致部分位置的装置无法进行人员巡检和排查;同时,考虑到部分设备故障后需要对其详细检查,此时再通过人员进行检查,会使得相关人员的安全收到影响。故化工企业采用机器人移动平台进行快速巡检和排险。
2、现有技术中,机器人移动平台主要包括轮式、足式、履带式和混合式等类型,轮式移动底盘具有运动便捷高效、载重能力与可靠度更强等优势,适用于化工企业快速巡检与排险的要求,但越障能力与稳定性偏差,在翻越管线或者装置时容易出现侧翻或者无法翻越的情况。足式移动机构对环境具备高适应性,能够弥补轮式结构越障能力、攀爬性能不足的问题,当然,足式结构存在负载与自重比低等缺点,导致这类结构的移动平台运行稳定性差。另外,履带式移动平台虽然也具备一定的越障能力,存在移动速度慢,转弯半径大,攀爬能力弱,能量消耗高等缺点,在化工企业中进行有效巡检以及快速排险的表现一般。
技术实现思路
1、针对现有技术存在的上述不足,本发明的目的在于提供一种一种巡检与排险机器人轮足式移动平台,以解决现有技术中机器人移动平台越障能力与稳定性偏差、负载与自重比低、移动速度慢、转弯半径大、攀爬能力弱、能量消耗高的问题。
2、为了解决上述技术问题,本发明采用如下技术方案:
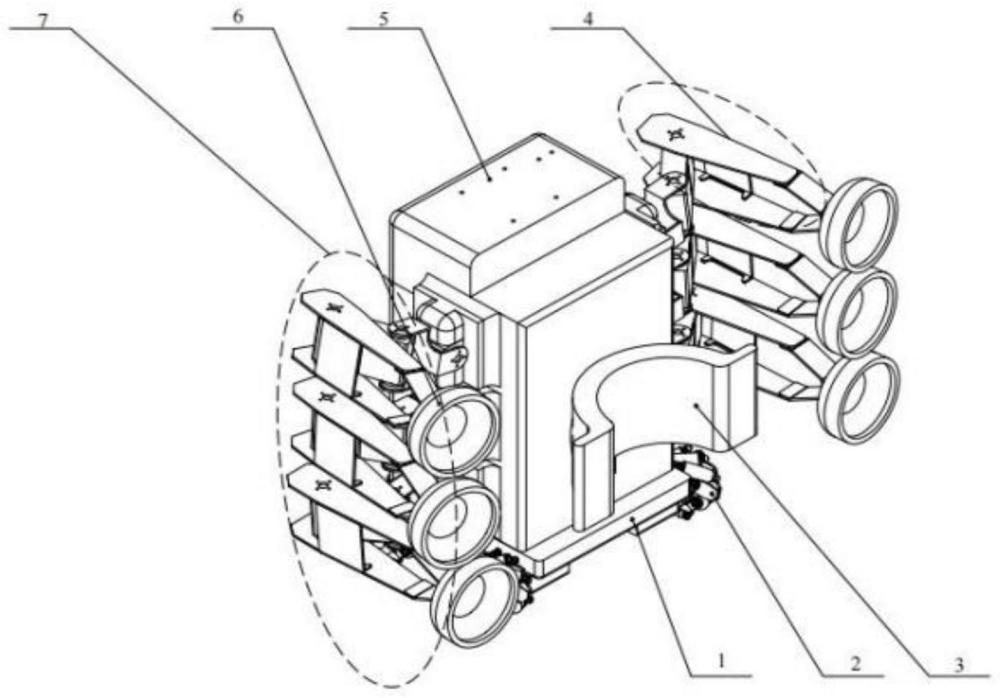
3、一种巡检与排险机器人轮足式移动平台,所述移动平台包括移动平台本体,在移动平台本体的底部设有一底座,所述底座与移动平台本体底部固定相连;在底座的下侧设有轮式移动机构,移动平台本体能够通过轮式移动机构进行移动;
4、在轮式移动机构的上方、移动平台本体相互背离的两侧还分别设有一攀爬机构,所述攀爬机构包括多个机械主臂,所述机械主臂沿移动平台本体长度方向间隔分布,且位于移动平台本体相互背离两侧的机械主臂一一对应设置;所述机械主臂的一端与移动平台相连,其另一端设有真空吸盘,所述机械主臂能够移动并带动真空吸盘一同运动,从而控制移动平台本体的位姿并将吸盘吸附在物体表面;
5、所述移动平台还包括控制系统、视觉与传感系统以及供电装置;所述供电装置为所述移动平台提供电源;所述视觉与传感系统设置在移动平台本体上,能够感知移动平台本体自身位姿以及周围环境变化并评估倾斜和侧翻风险,随后将收集以及分析后的信息数据传输至控制系统;控制系统接收视觉与传感系统发送的信息数据进行数据分析后自主决策,控制机械主臂以及轮式移动机构运动,从而实现所述移动平台的移动。
6、优选地,所述机械主臂包括基节、转节、腿节和跗节,舵机ii与移动平台本体相连,其驱动端与基节的一端传动相连,舵机ii能够驱动基节绕其驱动端的驱动轴转动;所述基节的另一端与舵机iii固定相连,舵机iii的驱动端与转节的一端传动相连,舵机iii能够驱动转节绕其驱动端的转轴转动;转节的另一端与舵机iv固定相连,舵机iv的驱动端与腿节的一端传动相连,舵机iv能够驱动腿节绕其驱动端的驱动轴转动;腿节的另一端与跗节的一端固定相连,跗节的另一端与真空吸盘固定相连。
7、优选地,在所述腿节靠近舵机iv驱动端的一侧还设有支撑板,该支撑板与腿节的两侧固定相连。
8、优选地,所述轮式移动机构包括多个麦克纳姆轮和舵机i;所述麦克纳姆轮位于底板相互背离的两侧且间隔分布,舵机i位于麦克纳姆轮与底座之间,舵机i的一端与底座固定相连,其驱动端与麦克纳姆轮传动相连,所述舵机i能够驱动麦克纳姆轮转动;麦克纳姆轮与舵机i一一对应设置。
9、优选地,在舵机i与麦克纳姆轮之间还设有一垫片,所述垫片的一侧与舵机i的驱动端传动相连,其另一侧与麦克纳姆轮固定相连。
10、优选地,所述垫片为十字型。
11、优选地,所述麦克纳姆轮包括一套筒,所述套筒的一端设有一轮毂,所述轮毂朝向套筒的一侧沿套筒方向延伸形成凸起,并伸入套筒一端的内部且继续延伸至所述套筒的另一端,所述套筒的另一端通过螺柱与轮毂固定相连;;在轮毂和螺柱朝向套筒的一侧分别设有一轮辐,在所述轮辐的边缘具有向外凸起的连接端,所述连接端朝向背离轮辐轴线的方向向外延伸,同时还朝向另一轮毂的方向倾斜,使连接端与轮辐所在平面之间具有夹角;并且,连接端的延伸方向与轮辐轴线之间的夹角为45°;在两个轮辐相对的一侧还设有多个轮胎,所述轮胎沿套筒外侧间隔分布,轮胎的两端分别与两个轮辐的一个连接端转动相连,使轮胎在套筒外侧表面呈倾斜设置,且轮胎能够绕轮胎的轴线转动;所述轮毂与垫片固定相连。
12、优选地,在轮胎的两端分别设有一滚动体,所述轮胎套设在滚动体一端的外侧,且能够绕其轴线在转动;单头螺柱穿过轮胎和滚动体后通过螺母与轮辐的一端固定相连。
13、优选地,在两个攀爬机构之间的移动平台本体正面还设有一磁力吸盘,用于吸附在金属表面。
14、与现有技术相比,本发明具有如下有益效果:
15、1、本发明所述巡检与排险机器人轮足式移动平台,除了能够在移动平台上承载多种设备,比如高清摄像、嗅觉传感器、灭火喷枪等,应对石化企业各种环境和突发状态;在机械主臂末端采用六个能够交叉攀爬的真空吸盘,搭配高性能磁力吸盘辅助,完成高空爬壁作业任务;提升了机器人的攀爬和移位性能,保障了机器人能够更加稳定的在化工企业高乱错杂环境中,进行攀爬作业和及时排险。
16、2、本发明所述巡检与排险机器人轮足式移动平台的足式结构设计成防前倾后仰与侧翻的机械主臂形式,对称分布于机器人主体两侧。上侧两个机械主臂旨在防止机器人前倾和后仰,下侧两个机械主臂旨在防止机器人侧翻,中侧两个机械主臂则起到辅助作用,用于配合上侧或下侧的机械主臂避免前后倾和侧翻。采用这种结构能够有效保障了机器人在遇到坑洼路面或翻越不同直径和尺寸管道时的稳定性能,降低了机器人发生倾覆和损坏的风险,减少了反复维修的成本。
17、3、本发明所述巡检与排险机器人轮足式移动平台上设置了防前倾后仰与侧翻的机械主臂,机械主臂包括基节、转节、腿节、支撑板、跗节以及舵机。通过所述防前倾后仰与侧翻机械主臂,确保了机器人能够稳定的翻越不同尺寸的管道,以及绕过固定障碍物比如化工企业中的箱体,避开移动障碍物比如化工企业中工作人员,有效避免机器人可能发生的倾倒情况。
18、4、本发明所述巡检与排险机器人轮足式移动平台上四轮移动机构设置在机器人移动平台本体下侧,具有运动便捷高效、载重能力强等优点,包括底座,舵机和麦克纳姆轮等机构,每个麦克纳姆轮内侧设有舵机,用以驱动平台移动,控制器通过舵机实现麦克纳姆轮旋转速度和方向的不同组合,完成车辆对角线位移或任意方向移动,充分发挥出轮式结构全方位高效率运移的优势。
19、5、本发明所述巡检与排险机器人轮足式移动平台能够在平缓路面正常行走,当需要攀爬管道或穿过颠簸路面时,控制器发出轮足切换指令,控制舵机驱动六足真空吸盘配合磁力吸盘机构,完成罐壁的攀爬,当需要越过坑洼不平整路面或翻越不同尺寸的管道等障碍时,在轮式移动的基础上,采用多关节机械臂防前倾后仰与侧翻,保障越障平衡度和稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228028.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表