一种多维度输电铁塔攀爬装置及输电铁塔攀爬方法
- 国知局
- 2024-08-01 07:41:58
本技术实施例涉及输电,尤其涉及一种多维度输电铁塔攀爬装置及输电铁塔攀爬方法。
背景技术:
1、目前,在输电技术领域,将攀爬装置代替登塔人员进行登塔维修,能够减少工作的危险性。现有攀爬装置大多采用机身正置于塔架的布置方式,图1为现有的攀爬装置工作状态示意图,如图1中所示,现有的攀爬装置01正置于塔架02,由于现有的攀爬装置只能进行直线爬行,在面对弯折塔架时,例如猫头型铁塔和酒杯型铁塔的转弯部分时,现有的攀爬装置无法进行转弯。
技术实现思路
1、有鉴于此,本技术实施例提供一种多维度输电铁塔攀爬装置及输电铁塔攀爬方法,能够实现在弯折的铁塔架上转弯爬行功能。
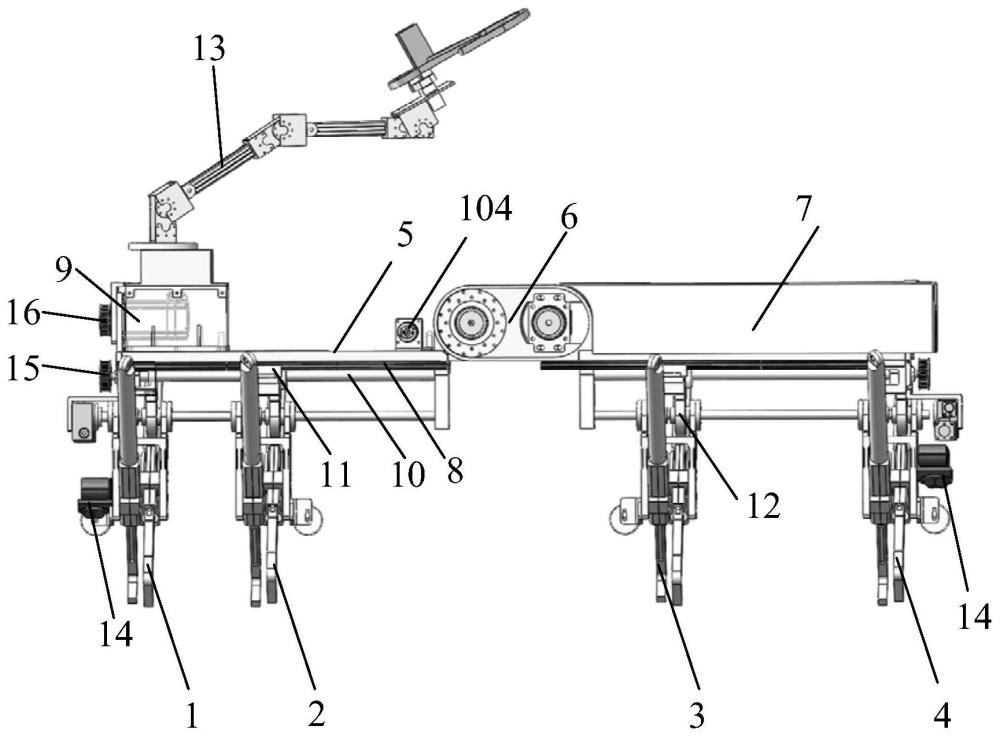
2、根据本技术实施例的第一方面,提供一种多维度输电铁塔攀爬装置,所述装置包括:第一夹持机构,第二夹持机构,第三夹持机构,第四夹持机构,上机身,机械关节,下机身,直线导轨,丝杠驱动电机,滚珠丝杠,滑块,连接机构,挂绳机构;其中,
3、所述上机身通过机械关节与下机身相连,所述机械关节包括关节驱动电机和减速器,可以实现任意角度的摆动和定位;所述丝杠驱动电机包括两个,分别位于所述上机身和下机身的末端;所述滚珠丝杠包括两个,分别位于所述上机身和下机身底部,所述滚珠丝杠一端与丝杠驱动电机相连,用于在丝杠驱动电机的驱动下转动;所述直线导轨包括两套,分别固定于所述上机身和下机身底部的两侧;所述滑块,包括四个,两两安装于两个滚珠丝杠上,并通过直线导轨进行导向移动,用于在滚珠丝杠的转动下前后移动;所述连接机构包括两套,分别位于上机身和下机身,并与四个滑块连接,用于安装四个夹持机构;所述第一夹持机构,第二夹持机构通过对应的连接机构安装在上机身对应的滑块上,且第一夹持机构位于第二夹持机构前面;所述第三夹持机构,第四夹持机构通过对应的连接机构安装在下机身对应的滑块上,且第三夹持机构位于第四夹持机构前面;所述第一夹持机构,第二夹持机构,第三夹持机构,第四夹持机构用于在攀爬过程中夹紧或松开塔架;所述直线导轨还用于在攀爬过程中根据攀爬要求通过四个滑块分别固定所述第一夹持机构,第二夹持机构,第三夹持机构,第四夹持机构;所述挂绳机构,位于上机身前端,用于将安全绳悬挂于输电铁塔。
4、在一些示例性的实施例中,所述连接机构包括:安装架,旋转杆驱动电机,旋转杆,支架,滚珠花键,其中,
5、所述安装架包括两套,分别位于上机身和下机身,用于安装所述旋转杆驱动电机和旋转杆;所述旋转杆驱动电机包括两个,分别安装于两套安装架的一端,用于驱动旋转杆旋转;所述旋转杆包括两个,分别安装于两套安装架,用于在旋转杆驱动电机的驱动下旋转;所述支架包括四个,分别固定于四个滑块,中间设置有圆孔,旋转杆从所述圆孔中穿过;所述滚珠花键,包括四套,两两安装于所述旋转杆,所述滚珠花键包括轴承和夹持机构连接架,所述轴承位于支架的圆孔中,夹持机构连接架位于支架外侧,与轴承联动,所述滚珠花键用于在旋转杆的转动下左右转动;所述第一夹持机构,第二夹持机构,第三夹持机构,第四夹持机构分别通过夹持机构连接架固定安装于四套滚珠花键。
6、在一些示例性的实施例中,每一个安装架包括两个安装板,四个安装板分别位于上机身和下机身的首尾;所述两个旋转杆驱动电机分别安装于两套安装架的一端的安装板上。
7、在一些示例性的实施例中,所述旋转杆上设置有与滚珠花键配合的凹槽,所述滚珠花键通过所述凹槽与旋转杆左右方向固定;在滑块前后移动的过程中,所述支架和滚珠花键在旋转杆上前后移动,从而带动夹持机构前后移动;在旋转杆左右转动的过程中,所述滚珠花键随旋转杆左右转动,从而带动夹持机构左右摆动。
8、在一些示例性的实施例中,在所述攀爬装置在攀爬输电铁塔的笔直塔架时,所述上机身、机械关节、下机身沿攀爬方向呈一条直线;在所述攀爬装置在攀爬输电铁塔的弯折塔架时,所述上机身与下机身能够通过机械关节形成夹角。
9、在一些示例性的实施例中,所述装置还包括图像采集部件,所述图像采集部件位于所述攀爬装置的两端,用于采集输电铁塔的图像信息,生成铁塔三维立体模型,用于攀爬装置的路径规划和爬升控制。
10、在一些示例性的实施例中,所述夹持机构包括:手爪,连杆,电缸支座,电缸,限位杆,安装座,弹簧,滚轮,滚轮支座;其中,所述手爪,连杆,电缸支座,电缸,限位杆,弹簧均为两个,对称安装于所述夹持机构;
11、所述手爪的根部与限位杆连接,并通过连杆与电缸连接,用于在攀爬过程中夹紧或松开输电铁塔的塔架;所述电缸和限位杆位于所述电缸支座内,所述电缸包括驱动机构,用于在驱动机构驱动下的通过自身的推出与收回驱动手爪的张开与夹紧;所述限位杆用于对手爪进行导向并为手爪的张开提供支点;所述电缸支座,位于所述夹持机构两侧,用于支撑所述手爪的根部、连杆,电缸,限位杆的推出与收回;所述滚轮支座安装于所述安装座,且位于两个手爪中间;所述滚轮安装于所述滚轮支座,用于和手抓配合使用抱紧输电铁塔角钢,实现攀爬机器人爬升和作业;所述弹簧安装于所述滚轮支座,用于保证滚轮始终与输电铁塔角钢接触。
12、在一些示例性的实施例中,所述挂绳机构包括:包括旋转工作台,第一舵机,第一关节支架,第一型铝,第二舵机,第二关节支架,第二型铝,第三舵机,第三关节支架,机械臂连接板,机械臂电机,旋转卡槽,锁扣,电动转轴,其中,
13、所述旋转工作台,包括机械臂底座和转盘,所述机械臂底座与攀爬装置连接,所述转盘安装于机械臂底座,能够在机械臂底座上旋转;所述第一舵机安装于所述旋转工作台,其输出端连接第一关节支架;第一型铝一端安装于所述第一关节支架,另一端与第二舵机相连;所述第二舵机的输出端连接第二关节支架;第二型铝一端安装于所述第二关节支架,另一端与第三舵机相连;所述第三舵机的输出端连接第三关节支架;所述机械臂连接板安装于所述第三关节支架,用于安装所述机械臂电机和旋转卡槽;所述机械臂电机和旋转卡槽分别安装于所述机械臂连接板两侧,所述机械臂电机用于驱动旋转卡槽旋转,所述旋转卡槽用于安装所述锁扣。
14、本技术实施例的第二方面,提供了一种输电铁塔攀爬方法,所述方法通过上述输电铁塔攀爬装置实现,所述方法应用于攀爬装置沿着小于180°弯折塔架爬升,包括以下步骤:
15、步骤1:上机身向上抬起,上机身与下机身通过机械关节形成与塔架弯折角度一致的夹角,第一夹持机构和第二夹持机构张开且悬空;
16、步骤2:第三夹持机构通过对应的滑块与下机身的滚珠丝杠连接,第四夹持机构通过对应的滑块断开与滚珠丝杠的连接,并与直线导轨固定,第三夹持机构闭合夹紧塔架,第四夹持机构张开;
17、步骤3:除第三夹持机构及其对应的滑块以外的攀爬装置的其他部件在下机身的滚珠丝杠的转动下向前移动,直至第四夹持机构接触或将要接触到第三夹持机构;
18、步骤4:第四夹持机构夹紧塔架,第三夹持机构张开;
19、步骤5:第三夹持机构在下机身的滚珠丝杠的转动下向前移动,直至第三夹持机构移动至下机身的前端;
20、重复上述步骤2至步骤5,直至机械关节到达塔架的拐角,第一夹持机构与第二夹持机构到达能够抓紧弯折后的塔架的高度;
21、步骤6:上机身的旋转杆驱动电机22驱动上机身的旋转杆23转动,带动第一夹持机构和第二夹持机构转动,直至第一夹持机构和第二夹持机构接触到弯折后的塔架;
22、步骤7:第一夹持机构通过对应的滑块与上机身的滚珠丝杠连接,第二夹持机构通过对应的滑块断开与上机身的滚珠丝杠的连接,并与直线导轨固定,第一夹持机构夹紧塔架,第二夹持机构张开,第三夹持机构和第四夹持机构悬空;
23、步骤8:除第一夹持机构及其对应的滑块以外的攀爬装置的其他部件在上机身的滚珠丝杠的转动下向前移动,直至第二夹持机构接触或将要接触到第一夹持机构;
24、步骤9:第二夹持机构夹紧塔架,第一夹持机构张开;
25、步骤10:第一夹持机构在上机身的滚珠丝杠的转动下向前移动,直至第一夹持机构移动至上机身的前端;
26、重复步骤8至10,直至攀爬装置爬过弯折塔架
27、步骤11:下机身向下放平,上机身与下机身通过机械关节形成一条直线。
28、本技术实施例的第二方面,提供了一种输电铁塔攀爬方法,所述方法通过上述输电铁塔攀爬装置实现,所述方法应用于攀爬装置沿着大于180°弯折塔架爬升,包括以下步骤:
29、步骤1:第一夹持机构和第二夹持机构张开且悬空;
30、步骤2:第三夹持机构通过对应的滑块与下机身的滚珠丝杠连接,第四夹持机构通过对应的滑块断开与滚珠丝杠的连接,并与直线导轨固定,第三夹持机构闭合夹紧塔架,第四夹持机构张开;
31、步骤3:除第三夹持机构及其对应的滑块以外的攀爬装置的其他部件在下机身的滚珠丝杠的转动下向前移动,直至第四夹持机构接触或将要接触到第三夹持机构;
32、步骤4:第四夹持机构夹紧塔架,第三夹持机构张开;
33、步骤5:第三夹持机构在下机身的滚珠丝杠的转动下向前移动,直至第三夹持机构移动至下机身的前端;
34、重复上述步骤2至步骤5,直至机械关节到达塔架的拐角,第一夹持机构与第二夹持机构到达能够抓紧弯折后的塔架的高度;
35、步骤6:上机身向下弯下,上机身与下机身通过机械关节形成与塔架弯折角度一致的夹角,上机身的旋转杆驱动电机22驱动上机身的旋转杆23转动,带动第一夹持机构和第二夹持机构转动,直至第一夹持机构和第二夹持机构接触到弯折后的塔架;
36、步骤7:第一夹持机构通过对应的滑块与上机身的滚珠丝杠连接,第二夹持机构通过对应的滑块断开与上机身的滚珠丝杠的连接,并与直线导轨固定,第一夹持机构夹紧塔架,第二夹持机构张开,下机身向上放平,上机身与下机身通过机械关节形成一条直线,第三夹持机构和第四夹持机构悬空;
37、步骤8:除第一夹持机构及其对应的滑块以外的攀爬装置的其他部件在上机身的滚珠丝杠的转动下向前移动,直至第二夹持机构接触或将要接触到第一夹持机构;
38、步骤9:第二夹持机构夹紧塔架,第一夹持机构张开;
39、步骤10:第一夹持机构在上机身的滚珠丝杠的转动下向前移动,直至第一夹持机构移动至上机身的前端;
40、重复步骤8至10,直至攀爬装置爬过弯折塔架;
41、步骤11:攀爬装置爬过弯折的铁塔,上机身5与下机身7通过机械关节6保持直线状态。
42、本技术实施例所述的多维度输电铁塔攀爬装置及输电铁塔攀爬攀爬方法,上机身和下机身能够通过中间的机械关节弯折形成一定的夹角,且四个夹持机构能够根据需要左右转动,能够准确的抓住弯折后的铁塔,实从而实现沿弯折塔架爬行的功能。同时,本技术实施例还公开了两种沿弯折塔架爬攀爬的方法,所述方法依赖本技术实施例所述攀爬装置实现,能够沿着各种角度的塔架爬升,解决了现有技术中攀爬装置在攀爬过程中无法转弯的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240722/228579.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表