一种探索仿生蜘蛛机器人
- 国知局
- 2024-08-01 07:46:51
本技术属于在恶劣环境下进行探索的,具体涉及一种探索仿生蜘蛛机器人。
背景技术:
1、在自然界和人类社会中往往会存在一些人无法轻易到达的地方和可能危及人类生命的特殊场合,如矿井探测、地质检测以及地震灾后救援等。当人类无法亲自在这些高危场景探索时,无形中降低了工作效率。现有的探测装置由于其转轮的结构,导致其难以在泥沙较多的环境中工作,因此获得一种克服上述缺陷的探索仿生蜘蛛机器人十分重要。
技术实现思路
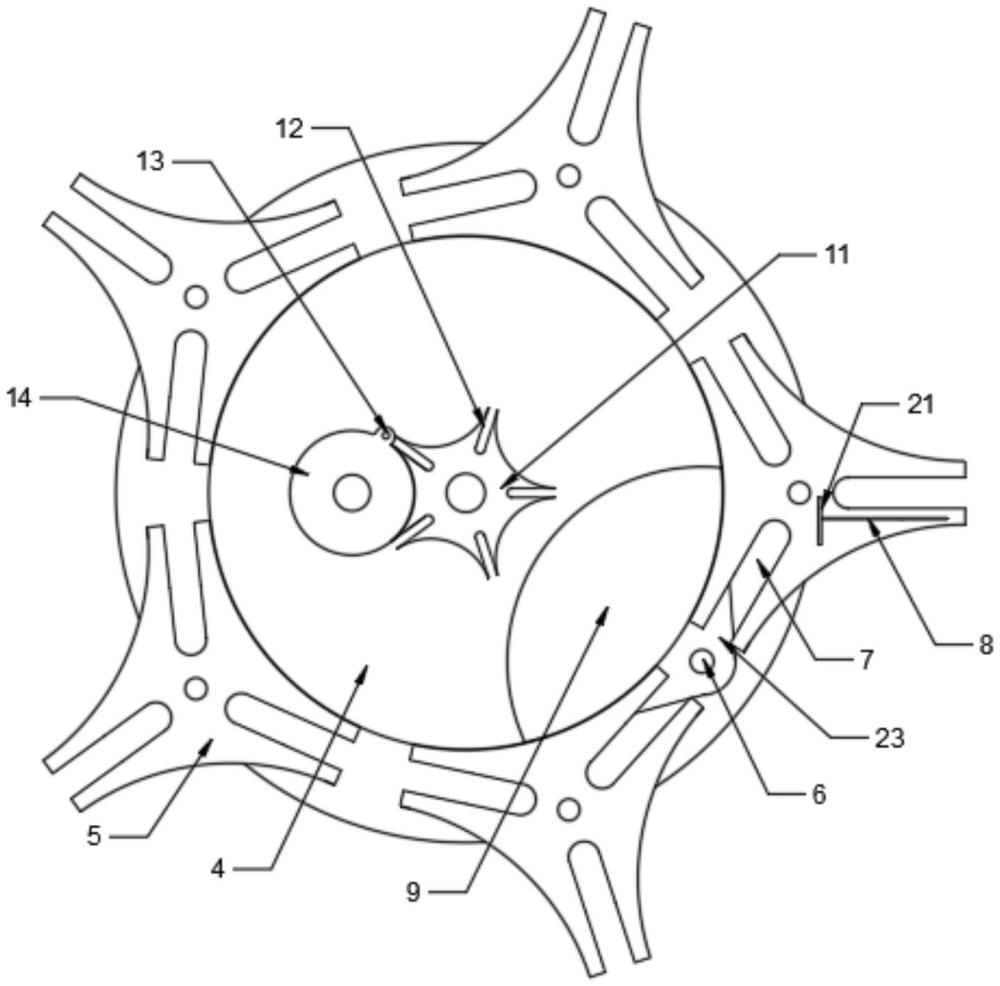
1、为解决上述至少一种技术问题,本实用新型提一种探索仿生蜘蛛机器人,包括蜘蛛主体和连接在蜘蛛主体周侧的蜘蛛脚主体,所述蜘蛛主体顶部安装有拨开机构,所述拨开机构包括固定在蜘蛛主体顶部的底板、所述底板上旋转连接有第一转盘,位于所述第一转盘周侧的所述底板上旋转连接有至少一个第二配合转盘,所述第一转盘周侧设有至少一个驱动杆,所述第二配合转盘上开设有至少两个与驱动杆配合的驱动轨道,所述第一转盘间歇转动以驱动第二配合转盘的转动,所述第二配合转盘上固定有拨片,所述蜘蛛脚主体位于所述拨开机构的投影范围内,位于所述驱动杆周侧的所述第一转盘上开设有用于与所述第二配合转盘转动的配合轨道。
2、蜘蛛主体内安装有现有探测所要的传感器。
3、通过上述技术方案,第一转盘和底板之间可安装现有结构的平面轴承,以减少转动获得的摩擦,第一转盘转动,以使驱动杆进入驱动轨道,进一步驱动第二配合转盘的转动,进而带动拨片的转动,拨片可以拨开阻挡的泥沙。
4、作为上述一种优选方式,还包括驱动第一转盘转动的驱动机构,所述驱动机构包括固定在所述第一转盘上且与所述第一转盘共心的驱动件,所述驱动件上开设有至少两个驱动导轨,还包括转轮,所述转轮底部固定有与所述驱动导轨配合的驱动块。
5、通过上述技术方案,驱动块进入驱动导轨,进而控制驱动件的转动,进而带动第一转盘的转动。
6、优选的,还包括驱动所述转轮的动力机构,所述动力机构包括固定在所述底板上的第一支架,所述第一支架上固定有第一电机,所述第一电机的输出轴与所述转轮固定连接;
7、或所述动力机构包括固定在所述底板上的第二支架,所述第二支架上固定有第二旋转气缸,所述第二旋转气缸的输出轴与所述转轮固定连接。
8、通过上述技术方案,第一电机为可反转的电机,第二旋转气缸为可正转反转的气缸,即可实现驱动件的往复旋转工作。
9、作为上述一种优选方式,所述蜘蛛主体周侧固定有双头电机,所述双头电机的输出轴通过减速箱固定所述蜘蛛脚主体,所述蜘蛛脚主体底部固定有电动万向轮。该双头电机可以控制蜘蛛脚主体与蜘蛛主体的旋转角度。
10、作为上述一种优选方式,所述拨片斜向上且向外固定在所述第二配合转盘上,所述拨片与所述第二配合转盘之间还固定有加强片。所述拨片中部向下延伸有延伸部,所述延伸部呈弧形。
11、其中,第一转盘上设有凸起,配合轨道开设在凸起上,第二配合转盘上开设有与凸起配合的凹槽,底板上固定有第一旋转轴,第二配合转盘套设在第一旋转轴上。底板上固定有第二旋转轴,第一转盘套设在第二旋转轴上,上述旋转轴配合结构安装有转动轴承。
12、与现有技术相比,本实用新型的优点在于:本实用新型结构简单,本实用新型蜘蛛可以在废墟场合使用,若遇到泥沙地,拨片可以拨开,开辟出一条路以供仿生蜘蛛机器人移动。
技术特征:1.一种探索仿生蜘蛛机器人,包括蜘蛛主体(1)和连接在蜘蛛主体(1)周侧的蜘蛛脚主体(2),其特征在于:所述蜘蛛主体(1)顶部安装有拨开机构,所述拨开机构包括固定在蜘蛛主体(1)顶部的底板(3)、所述底板(3)上旋转连接有第一转盘(4),位于所述第一转盘(4)周侧的所述底板(3)上旋转连接有至少一个第二配合转盘(5),所述第一转盘(4)周侧设有至少一个驱动杆(6),所述第二配合转盘(5)上开设有至少两个与驱动杆(6)配合的驱动轨道(7),所述第一转盘(4)间歇转动以驱动第二配合转盘(5)的转动,所述第二配合转盘(5)上固定有拨片(8),所述蜘蛛脚主体(2)位于所述拨开机构的投影范围内,位于所述驱动杆(6)周侧的所述第一转盘(4)上开设有用于与所述第二配合转盘(5)转动的配合轨道(9)。
2.根据权利要求1所述的探索仿生蜘蛛机器人,其特征在于:还包括驱动第一转盘(4)转动的驱动机构,所述驱动机构包括固定在所述第一转盘(4)上且与所述第一转盘(4)共心的驱动件(11),所述驱动件(11)上开设有至少两个驱动导轨(12),还包括转轮(14),所述转轮(14)底部固定有与所述驱动导轨(12)配合的驱动块(13)。
3.根据权利要求2所述的探索仿生蜘蛛机器人,其特征在于:还包括驱动所述转轮(14)的动力机构,所述动力机构包括固定在所述底板(3)上的第一支架(16),所述第一支架(16)上固定有第一电机(15),所述第一电机(15)的输出轴与所述转轮(14)固定连接;
4.根据权利要求1所述的探索仿生蜘蛛机器人,其特征在于:所述蜘蛛主体(1)周侧固定有双头电机(19),所述双头电机(19)的输出轴通过减速箱固定所述蜘蛛脚主体(2),所述蜘蛛脚主体(2)底部固定有电动万向轮(20)。
5.根据权利要求1所述的探索仿生蜘蛛机器人,其特征在于:所述拨片(8)斜向上且向外固定在所述第二配合转盘(5)上,所述拨片(8)与所述第二配合转盘(5)之间还固定有加强片(21)。
6.根据权利要求5所述的探索仿生蜘蛛机器人,其特征在于:所述拨片(8)中部向下延伸有延伸部(22),所述延伸部(22)呈弧形。
技术总结本技术公开一种探索仿生蜘蛛机器人,包括蜘蛛主体和连接在蜘蛛主体周侧的蜘蛛脚主体,所述蜘蛛主体顶部安装有拨开机构,所述拨开机构包括固定在蜘蛛主体顶部的底板、所述底板上旋转连接有第一转盘,位于所述第一转盘周侧的所述底板上旋转连接有至少一个第二配合转盘,所述第一转盘周侧设有至少一个驱动杆,所述第二配合转盘上开设有至少两个与驱动杆配合的驱动轨道,所述第一转盘间歇转动以驱动第二配合转盘的转动,所述第二配合转盘上固定有拨片,第一转盘和底板之间可安装现有结构的平面轴承,以减少转动获得的摩擦,第一转盘转动,以使驱动杆进入驱动轨道,进一步驱动第二配合转盘的转动,进而带动拨片的转动,拨片可以拨开阻挡的泥沙。技术研发人员:黄建华,崔明光受保护的技术使用者:吉林农业科技学院技术研发日:20240104技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/228927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表