一种三点支撑智能足结构、机器人及检测方法与流程
- 国知局
- 2024-08-01 07:53:13
本发明涉及机器人,尤其是指一种三点支撑智能足结构、机器人及检测方法。
背景技术:
1、近年来,人形机器人的研究受到了广泛的关注,可实现包括行走,奔跑,跳跃,翻滚等多种运动。机器人的力感知能力,是其运动控制中的关键,是保证机器人稳定性进而提高运动性能的关键。
2、在现有相关技术中,如专利公开号为cn116946280a,公开号的“双足机器人、人形机器人,机器人”的中国专利申请,其公开了:包括机身、布置在机身一侧两个腿组件,及固定在另一侧的摆腿关节,摆腿关节具有一沿水平方向的摆腿转动轴,摆腿关节用于驱动腿组件绕摆腿转动轴摆动,腿组件包括腿结构和转腿关节,转腿关节一沿竖直方向的转腿转动轴,转腿关节用于驱动腿结构绕转腿转动轴转动;腿结构包括大腿及驱动大腿转动的大腿关节、小腿及驱动小腿转动的小腿关节,以及足和足关节。可见,在上述对比文件中其足部结构为一整体,足传动组件使用曲柄与摇杆,通过与小腿相连接的曲柄与摇杆实现足与小腿之间的夹角变化,仅具备足部主要的支撑功能,不能对周围环境进行感知。
3、又如专利公开号为cn111959633a,专利名称为“一种液压驱动型足式仿生人形机器人”的中国专利申请,其足部结构为一平面脚,其液压驱动单元置于小腿下侧,通过液压驱动实现踝关节的侧摆和俯仰,但是脚部功能单一。
4、由此可知,在实现机器人运动功能方面,当前人形机器人主要关注髋-膝-踝结构,而足部结构本身往往受到忽视。为了简单耐用,足部大多采用简单的刚性结构,仅具有一定的支撑功能,但无法提供对地力反馈,难以提供足够精确的足地接触信息,无法通过足结构提供可靠的平衡数据,并且由于刚体结构变形较小,不能吸收机器人运动时足地之间碰撞对本体的冲击,容易损坏机器人本体结构。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中机器人足部大多采用的简单的刚性结构,仅具有一定的支撑功能,但无法像人一样提供对地力反馈,更不能减少运动时足地碰撞对本体的冲击的问题,提供了一种三点支撑智能足结构、机器人及检测方法。
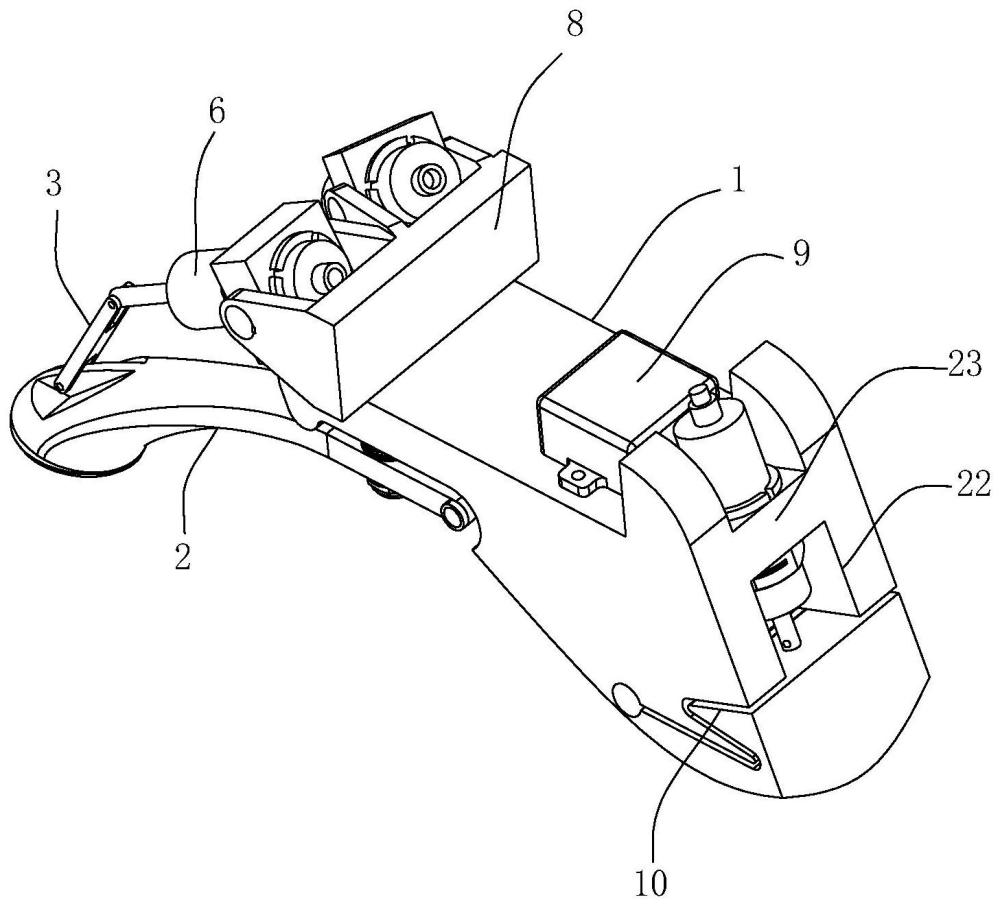
2、为解决上述技术问题,本发明提供了一种三点支撑智能足结构,包括:
3、足机构,其包括:足弓本体、开设于所述足弓本体第一侧的悬臂槽、至少两组分别转动连接在足弓本体第二侧的第一脚趾和第二脚趾、设置在每一第一脚趾和第二脚趾与足弓本体之间的弹性组件,所述悬臂槽包括:贯穿所述足弓本体宽度的浮动腔体、以及连通于所述浮动腔体一侧的安装腔体;
4、检测机构,其包括:至少两组分别设置于所述足弓本体的第一位移传感器、第二位移传感器和至少一组第三位移传感器,所述第一位移传感器和第二位移传感器的端部分别活动连接于第一脚趾和第二脚趾,所述第三位移传感器设置于所述安装腔体、且抵接于所述浮动腔体。
5、在本发明的一个实施例中,所述浮动腔体包括:开设于足弓本体第二侧的第一槽体、依次连通的第二槽体和第三槽体,所述第二槽体从第一槽体的端部向足弓本体第二侧延伸,所述第三槽体从第二槽体端部向足弓本体第一侧延伸,所述第三位移传感器设置于足弓本体的上方,其端部通过安装腔体穿过足弓本体并抵接于第一槽体的下侧壁。
6、在本发明的一个实施例中,所述弹性组件为碟簧组,所述碟簧组螺纹连接于每一第一脚趾或第二脚趾与足弓本体之间,且所述碟簧组设置在弓形部和第二转轴之间。
7、在本发明的一个实施例中,所述第一脚趾和第二脚趾分别设置有支架,所述第一位移传感器和第二位移传感器分别设置于两组支架且抵接于足弓本体。
8、在本发明的一个实施例中,至少两组所述第一位移传感器、第二位移传感器和至少一组第三位移传感器均为lvdt位移传感器。
9、所述足弓本体还设置有惯性测量单元,所述惯性测量单元包括加速度计和陀螺仪。
10、所述第一脚趾和第二脚趾均包括:平行部、连接于所述平行部端部的弓形部,所述平行部的近端通过第二转轴与足弓本体转动连接,所述平行部还通过螺杆和足弓本体相连接,使所述平行部和足弓本体之间形成浮动空间。
11、所述第一位移传感器和第二位移传感器的端部通过连杆机构分别活动抵接于第一脚趾和第二脚趾,所述连杆机构包括第一连杆组件和第二连杆组件,所述第一脚趾和第二脚趾分别通过第一连杆组件和第二连杆组件转动连接于第一脚趾和第二脚趾,所述第一连杆组件包括:穿设于所述第一脚趾的第一花键、连接于第一花键的连接杆、连接于第一位移传感器的拉杆,所述连接杆端部和拉杆端部通过第一转轴转动连接,所述第二连杆组件和第一连杆组件结构相同。
12、本发明还公开了一种机器人,包括上述的一种三点支撑智能足结构。
13、本发明还公开了一种三点支撑智能足结构的检测方法,用于检测上述的一种三点支撑智能足结构,包括如下步骤:
14、步骤s1:获取足结构中至少两组第一脚趾和第二脚趾、以及足弓本体支撑点的初始坐标;
15、步骤s2:在运动过程中,基于获取的初始坐标,通过至少两组第一位移传感器和第二位移传感器分别检测至少两组第一脚趾和第二脚趾支撑点的位移,通过第三位移传感器检测足弓本体支撑点的位移,得到变化后的坐标;
16、步骤s3:结合变化后的坐标和通过各支撑点位移数据分别计算得到的受力情况计算重心投影坐标,并提供平衡数据。
17、在本发明的一个实施例中,所述第一脚趾和第二脚趾位移与力关系计算方法为:脚趾落地时,脚趾支点受力f的作用,使脚趾支点在竖直方向的位置产生变化量δh,从而使连杆机构的长度发生变化,第一位移传感器或第二位移传感器检测到连杆长度变化量δl,对力f与第一位移传感器或第二位移传感器检测到的δl之间的关系进行标定,通过检测δl的大小而获得大脚趾与地面之间的接触力;
18、脚跟的位移与力关系计算方法为:足结构落地时,脚跟支点受力f'的作用,使脚跟支点在竖直方向的位置产生变化量δh',从而使悬臂梁的高度发生变化,第三位移传感器检测到悬臂槽长度变化量δl',对力f'与第三位移传感器检测到的δl'之间的关系进行标定,通过检测δl'的大小而获得脚跟与地面之间的接触力。
19、脚跟的位移与力关系计算方法还可以为:足跟触地受均布载荷,第三位移传感器采集悬臂梁结构的位移量,提供位移变化数据,可得脚跟位移量为
20、
21、式中,q为均布载荷,e为材料弹性模量,i为截面惯矩,l为第三传感器的位移变化量。
22、在本发明的一个实施例中,设三组支撑点分别为:第一脚趾、第二脚趾以及足弓本体的脚跟,则所述步骤s3还包括如下步骤:设第一脚趾受力点坐标为(x1,y1,0),受力大小为f1;第二脚趾受力点坐标为(x2,y2,0,),受力大小为f2;脚跟受力点坐标为(x3,y3,0),受力大小为f3,f1、f2、f3均为地面对机器人的反作用力,分别通过第一位移传感器、第二位移传感器和第三位移传感器的检测数据计算f1、f2和f3。
23、在本发明的一个实施例中,步骤s3还包括如下步骤:
24、设受力中心位置坐标为(x0,y0,0),由空间任意力系平衡方程得:
25、∑fi(-x0)=0(i=1,2,3)
26、∑fi(y-o)=0(i=1,2,3)
27、联立上述公式可求得重心投影位置坐标为(x0,y0,0)。
28、本发明可为足式机器人及智能假肢等提供一种支撑足结构,同时可通过集成在足内部的位移传感器和惯性传感器为机器人提供受力信息和足部位姿,进而提供机器人重心投影位置,为机器人的平衡控制提供参考:还能通过弹性组件和悬臂梁结构对足地之间的碰撞提供缓冲,改善机器人本体的受力情况。
29、本发明的上述技术方案相比现有技术具有以下优点:
30、本发明所述的一种三点支撑智能足结构,通过第一脚趾和第二脚趾和脚跟形成三点定位支撑的结构,使足结构保持足够的稳定性,通过在架体上设置第一位移传感器和第二位移传感器,使足结构在受力时导致第一脚趾和第二脚趾产生微小位移,通过所得到的位移信号计算得到第一脚趾和第二脚趾与地面接触力的大小,通过设置的悬臂槽,使足弓本体的弓体和后跟部分形成柔性铰链结构,在脚跟受力时产生形变,从而计算得到脚跟与地面接触力的大小,通过得到的第一脚趾和第二脚趾处以及脚跟处的接触力大小可以计算得到机器人重心在地面上的投影位置,通过弹性组件和悬臂梁结构可以对足地之间的碰撞提供缓冲,避免各传感器直接承受足地支撑力,还能为足结构提供用于位移和受力情况分析的平衡数据,实现人形机器人平衡控制和稳定行走。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229348.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种固定装置的制作方法
下一篇
返回列表