一种基于模块可重构的野外多功能轮式无人车辆平台
- 国知局
- 2024-08-01 08:06:41
本发明涉及一种轮式车辆平台,尤其涉及一种基于模块可重构的野外多功能轮式无人车辆平台,属于车辆装置。
背景技术:
1、随着轮式无人平台在军事、工业、农业、道路交通、救援等领域是广泛应用,野外轮式无人车辆平台技术愈发受到关注。结合现代战场特点,具有卓越通过性、模块重构性的野外轮式无人车有着广阔的应用前景,是目前的发展方之一。
2、由于军事领域对平台性能有着极高的要求,传统轮式车辆平台已经很难满足复杂野外环境下的作战,具有变车轮高度、变轴距、变轮距功能的轮式车辆平台被越来越多的考虑。然而,当平台面对宽沟壕或高台阶时,单一的变车轮高度或变轴距或变轮距功能就显得作用十分有限,需要平台能同时对车轮高度、轴距以及轮距进行调整,以大幅提高平台在野外战场环境中的通过能力。
3、同时,根据不同的作战任务,无人轮式平台由于需要搭载不同的任务装备,必须有较好的拓展性和充足的拓展空间,而传统构型的拓展性和空间显然是不足的,需要对平台的构造进行重新优化。
4、除此之外,由于战场环境下平台部件的报废率高,对平台部件进行高度集成并使其具有一定的重构性就显得至关重要。在保证变车轮高度、变轴距、变轮距功能实现的前提下,不仅要尽可能地将零部件进行模块化设计,还要使其具有一定的重构性,当某个或某几个模块无法使用时,平台仍可维持绝大部分功能继续运行。
5、因此,设计一种同时具备调整底盘高度、轴距、轮距功能且具有重构性的野外多功能无人轮式平台是本领域技术人员亟待解决的技术问题。
技术实现思路
1、1、发明目的:
2、本发明为了解决上述背景技术中的问题,基于模块化设计、重构技术、轮式车辆技术和机械自动化技术,提供一种基于模块可重构的野外多功能轮式无人车辆平台,既可以实现车轮高度、轴距、轮距的调整,又具有一定的模块重构性,还可以搭载不同的任务装备。
3、2、技术方案:
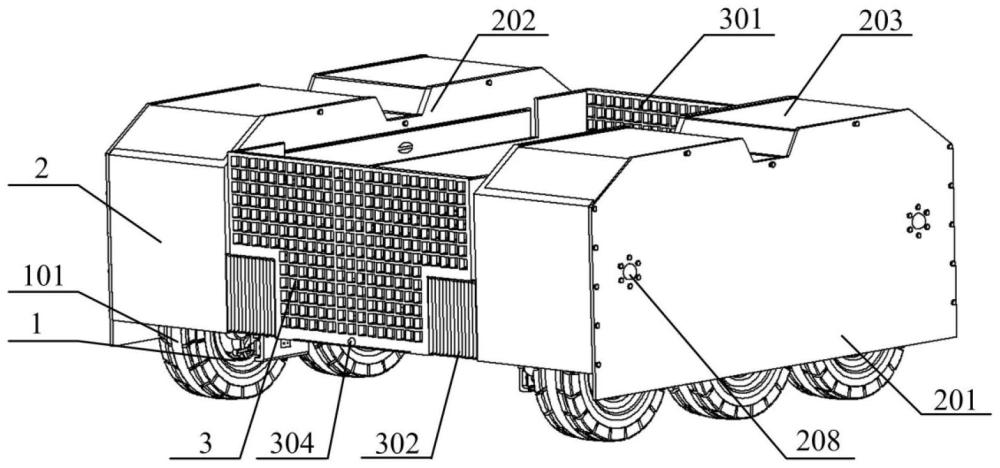
4、本发明一种基于模块可重构的野外多功能轮式无人车辆平台,以构架模块和网架模块的刀片电池组作为车辆平台运动以及调整车轮高度、轴距、轮距的动力来源,使用北斗导航系统定位平台位置并通过四个侧视摄像头和两个环视摄像头观察周围环境,依据遥控系统向各个模块的信息处理系统和控制系统发出aes加密的控制指令,实现对平台的控制;车辆平台的各模块高度集成且装配简洁、简单,可以实现快速拆装;在一般野外环境下,平台可以以6×6或5×5或4×4或3×3或2×2的构架形式行驶;在宽沟壕或高台阶时,操控者可以通过遥控系统同时调整车辆平台的车轮高度、轴距以及轮距实现越壕或越阶。
5、本发明一种基于模块可重构的野外多功能轮式无人车辆平台,包括动力模块、构架模块、网架模块、空心伸缩轴、遥控系统,其特征在于:动力模块通过轮毂电机系统来控制车辆平台的运动;每个构架模块下部至少安装两个动力模块,且优先满足两端的安装需求,以保障平台的运动稳定性;构架模块两端的动力模块通过螺栓将高度弹簧安装座固定在螺栓插板下部;构架模块两端的动力模块通过连接板上的走马销和螺栓固定在构架内侧板内侧;构架模块中部的动力模块将高度弹簧安装座安装在滑轨插板下部的滑轨中,当轴距变化时,该动力模块的高度弹簧安装座在滑轨插板下部的滑轨中滑动,跟随轴距变化;构架模块中部的动力模块安装在构架内侧板内侧的滑轨中,当轴距变化时,该动力模块的连接板在滑轨中滑动,跟随轴距变化;相邻的两个动力模块之间通过轴距调节弹簧连接;动力模块上部的轮距调节弹簧穿过伸缩罩两侧的圆孔与多功能网架凸配;构架模块的构架内侧板和多功能网架的外侧安装有弹簧座,并通过弹簧座内的扭转弹簧弹性连接构架模块和网架模块;网架模块两侧的伸缩罩安装在构架模块的构架内侧板外侧;空心伸缩轴的两端分别安装在网架模块两侧的构架外侧板内侧且空心伸缩轴贯穿网架模块,用于承载;构架模块和网架模块的电池组通过导线与各模块的用电设备相连;各模块的信号处理系统、控制系统通过导线和数据线连接;
6、所述动力模块用于控制车辆平台的行驶,并实现车轮高度±0.2m、平台轮距±0.2m的调整;包括车轮、车轮支架、插销组、上摆臂、下摆臂、轮毂电机系统、液压转向系统、转向弹簧、弹簧架、轴距调节弹簧安装座、连接板、轮距调节弹簧、高度弹簧安装座、车轮高度调节弹簧以及信号处理系统、控制系统;轮毂电机系统安装在车轮的轮毂内侧上;车轮支架安装在轮毂电机系统的外侧,有两个圆孔伸出臂和一个球铰伸出臂,从而可以同时提供3个连接接口方便上摆臂、下摆臂以及液压转向系统的连接;上摆臂和下摆臂的窄端和宽端分别安装在车轮支架的圆孔伸出臂和弹簧架上,并通过插销组限制移动,使其只能绕轴转动不能移动;下摆臂设置柱形轴以供轴距调节弹簧连接,上摆臂设置大缺口,以增大轴距调节弹簧的活动范围,提高轴距调节的冗余性;弹簧架通过转向弹簧与连接板弹性连接的方式连接,不仅可以吸收车轮受到的冲击还能提供转向力矩;液压转向系统的两端分别与车轮支架的球铰伸出臂和连接板配合;轴距调节弹簧安装座安装在连接板的两个窄侧面;车轮高度调节弹簧的上下两端分别安装在高度弹簧安装座和下摆臂的柱形轴上;轮距调节弹簧安装在连接板上端,并通过插销组限制;动力模块的信号处理系统、控制系统设置在连接板的中部,它们通过数据线和导线连接;信号处理系统、控制系统通过数据线、导线与轮毂电机系统、车轮高度调节弹簧、轮距调节弹簧、液压转向系统的液压缸连接;
7、所述构架模块用于提供电能、保护动力模块并实现轴距±0.2m的调整;包括:构架外侧板、构架内侧板、构架顶板、螺栓插板、滑轨插板、轴距调节弹簧、侧视摄像头、构架电池组、构架电池组盖板以及信号处理系统、控制系统;构架顶板、螺栓插板、滑轨插板的长侧面与构架外侧板和构架内侧板内侧直配,滑轨插板的两个宽侧面与两侧螺栓插板的宽侧面直配;轴距调节弹簧布置在构架内侧板内侧下部,每个轴距调节弹簧两侧各连接一个动力模块;侧视摄像头安装在构架外侧版的上部两端;两个构架电池组安装在构架顶板的下部的两个凹槽内并分别通过构架电池组盖板固定,构架电池盖板上留有圆孔以供导线穿过;导线穿过构架电池组盖板的圆孔与用电设备连接;构架模块的信号处理系统、控制系统设置在构架内侧板内侧的中部,通过数据线和导线连接并与轴距调节弹簧连接;
8、所述网架模块用于提供电能,搭载任务装备;包括:多功能网架、伸缩罩、锥形锁止弹簧、环视摄像头、锥形插销、弹簧座、底盘电池组、底盘电池组盖板、扭转弹簧以及信号处理系统、控制系统;多功能网架是网架模块其他部件的安装单元,两侧的伸缩罩、六个锥形锁止弹簧以及四个弹簧座都安装在多功能网架两侧的下部;环视摄像头安装在多功能网架两端的下部;锥形插销安装在多功能网架球铰凹槽上部的锥形孔;一个底盘电池组安装在多功能网架下部的凹槽内并通过底盘电池组盖板固定;底盘电池组的导线穿过底盘电池组盖板的圆孔与锥形锁止弹簧以及其他模块的用电设备连接;网架模块的信号处理系统、控制系统设置在多功能网架的下部,它们通过数据线和导线连接;信号处理系统、控制系统通过数据线、导线与锥形锁止弹簧连接;
9、所述遥控系统包括遥控键盘、通信系统以及至少一个显示屏,用于观察平台周围环境并通过遥控键盘对平台的动力模块、构架模块和网架模块发出控制指令;
10、所述车轮、车轮支架、插销组、上摆臂、下摆臂、弹簧架、轴距调节弹簧安装座、连接板、轮距调节弹簧、高度弹簧安装座、车轮高度调节弹簧、构架外侧板、多功能构架板、网架模块、多功能网架、伸缩罩、锥形锁止弹簧为自制件,其余零部件为市购件;
11、所述构架模块为平台的防护结构,在构架外侧板和构架内侧板的上部加工梯形缺口,便于骑坐;
12、所述多功能网架的网架节点采用焊接球节点,以保证网架具有较好的力学性能;
13、所述构架模型、多功能网架的材料和制造工艺采用uhmwpe纤维机械加工而成,兼具防弹性能和轻量化;
14、所述空心伸缩轴的材料由34crnimo6合金机械加工而成;
15、所述动力模块、构架模块、网架模块的控制系统由通信模块、硬件安全模块、stm32单片机、电路板、数据线、导线等组成,通信模块、硬件安全模块和stm32单片机都焊接在电路板上,并通过数据线和导线连接。
16、所述滑轨模块下部加工有一个贯穿的t型滑槽,装配时,车轮高度调节弹簧安装座从一侧t型滑槽入口插入后,滑轨插板再与两侧的螺栓插板直配,由于螺栓插板上不设置任何滑槽,因此车轮高度调节弹簧安装座只能在t型滑槽上滑动,从而限定了轴距的变化范围,必要时,增大滑轨模块的长度,可以进一步增加轴距变化范围。
17、所述轴距调节弹簧安装座下侧的中部设置有凸台并开螺栓孔,两侧装有滑轮,且滑轮超出安装座上侧平面2-4mm,使得轴距调节弹簧安装座既可以通过螺栓固定在螺栓插板的凹槽内,也可以插入滑轨插板的滑槽中通过滑轮实现左右滑动,从而在车轮高度调节的同时实现轴距的调整。
18、所述动力模块的连接板上设置有走马销,构架内侧板内侧设置有与连接板上走马销配合的凹槽,走马销与凹槽之间预先涂覆润滑剂,中部动力模块的连接板插入走马销凹槽后,向中部滑动即可完成装配,而两端动力模块的连接板插入走马销凹槽后需要向两侧滑动并配合2-4个螺栓固定,极大地加快了动力模块的拆卸装配速度并提高了装配结构的可靠性。
19、所述车辆平台具有极强的重构性,可以快速装配成2×2、3×3、4×4、5×5以及6×6的车辆平台,当车辆平台为6×6或5×5时,可以同时实现车轮高度、轴距、轮距调整;当车辆平台为4×4时,可以同时实现车轮高度、轮距调整;当车辆平台为3×3时,可以实现车轮高度、轴距调整;当车辆平台为2×2时,可以实现车轮高度调整。
20、所述车辆平台通过遥控系统发送的控制信号调整车轮高度、轴距、轮距、加速度、转角,主要用于平台越宽壕沟和爬台阶,在面对宽壕时,预先遥控前、中动力模块的轴距减小,前轮先越过宽壕,再不断减少中、后动力模块的轴距并让中、后动力模块越过宽壕,完成平台的越壕;在面对台阶时,预先升高前部动力模块车轮,使前轮开始爬阶,中部动力模块逐渐离开地面,再适当降低中部动力模块车轮的高度,使用中、后部动力模块支撑,再降低后部动力模块车轮的高度,前部动力模块逐渐接地,中部动力模块承受大部分载荷,最后后部动力模块约上台阶,完成平台的越阶;
21、所述中部动力模块居中或纵向移动+0.2m或时,多功能网架下部的锥形锁止弹簧会伸展并将椎体插入连接板中部的锥形孔中,以实现轴距变化的机械锁止。
22、所述遥控系统可以对某个或某几个车轮的高度进行调整,其余车轮高度不变;可以对一侧或两侧的动力模块轴距、轮距进行调整。
23、所述遥控键盘包括键盘模块、硬件安全模块和通信模块,键盘模块输入的控制指令先通过键盘内部的硬件安全模块进行aes加密,再由通信模块发出,车辆平台上的硬件安全模块接收信号、解密aes信号,并将解密的控制信号传给电伺服油气弹簧,提高通信的安全性。
24、3、本发明一种基于模块可重构的野外多功能轮式无人车辆平台,相比现有技术具有以下进步和优点:
25、(1).车辆平台的主要重量部件以uhmwpe纤维复合材料为主,平台装甲性能提高的同时,整车质量显著下降;
26、(2).车辆平台具有极强的拓展性和较大的拓展空间,可以根据不同的作战任务,快速部署小、中、大型装备,实现不同的功能;
27、(3).车辆平台基于模块化设计理念实现了零部件的高度集成,且集成模块之间的配合简洁、简单,可以实现平台的快速拆装,战场适应能力好;
28、(4).车辆平台具有极好的重构性,可以以6×6或5×5或4×4或3×3或2×2的构架形式行驶;
29、总之,该系统是一种轻量化、模块化且具有重构性的野外多功能无人轮式车辆平台,可以代替人来执行侦查、救援、后勤支援、火力支援等任务,避免人员伤亡的同时提高任务完成效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/230425.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表