一种柔性可变自由度履带机器人及其控制方法
- 国知局
- 2024-08-01 08:10:54
本发明涉及履带机器人控制,具体涉及一种柔性可变自由度履带机器人及其控制方法。
背景技术:
1、随着科技的发展,移动机器人在各个领域得到广泛的应用,履带机器人因其具有结构紧凑、地形适应能力强等优点而被广泛关注。履带机器人的越障性能会受自身体积影响,当履带机器人机体较小时,其越障性能就会大大减弱,导致需要在越障性能要求较高的环境中使用时,机器人机体必须足够大,这不仅增加了制造成本,且因为机体较大使得机器人更加笨重,降低了使用的便捷性。甚至在某些需要机器人拥有较高的越障性能的同时要求小机体的使用场景,例如在井下灾后钻孔救援现场,大型机器人无法通过钻孔空间,小型机器人又因越障性能无法完成探测救援任务,导致难以开展救援工作。
2、同时,现有技术的履带机器人多使用自由度不可改变的履带,在遇到接触面较为陡峭的障碍物时容易出现履带打滑等情况,导致无法有效的翻越障碍物。在翻越陡峭的障碍物时,现有技术的履带机器人由于缺乏柔性,当履带机器人体型较小时,难以翻越较为陡峭的障碍物,而其缺乏柔性导致的重心变化不够稳定导致越障过程中会出现重心过高等情况,也是其翻越能力较差的重要原因。
技术实现思路
1、本发明要解决的技术问题是:针对现有技术的不足,提供一种柔性可变自由度履带机器人及其控制方法,能够在保证履带机器人体积小巧的同时亦具有较高的越障性能,且能够实现自动越障控制,适应狭小空间的越障需求。
2、为解决上述技术问题,本发明采用的技术方案是:
3、一、一种柔性可变自由度履带机器人
4、本发明提供了一种柔性可变自由度履带机器人,包括:可变自由度履带1、头部驱动与锁定模块2、尾部驱动与解锁模块3和支撑组件4,所述可变自由度履带1由多个顺次连接的履带模块组成,每个履带模块均包括履带主体12、锁定销11和连接轴13;所述头部驱动与锁定模块2安装于支撑组件4头部,且包括驱动齿轮一21和辅助锁定组件22;所述尾部驱动与解锁模块3安装于支撑组件4尾部,且包括驱动齿轮二31和被动解锁组件32;所述支撑组件4包括支撑板41和支撑块42;
5、所述可变自由度履带1绕设于支撑块42外部,且可变自由度履带1头部和尾部分别与所述驱动齿轮一21和驱动齿轮二31相啮合;所述支撑板41头部设有视觉识别摄像头43和越障控制器44,所述驱动齿轮一21、驱动齿轮二31和辅助锁定组件22均与所述越障控制器44电连接。
6、优选的,所述锁定销11设有两组且对称设置于所述履带主体12两端,相邻两个履带主体12通过所述连接轴13相连接。
7、优选的,所述锁定销11外圆柱面上设有弧形凸面111和两个长度不同且交错设置的圆柱凸台113,所述锁定销11内圈设有与所述连接轴13相适配的十字圆柱112。
8、优选的,所述履带主体12上开设有与所述弧形凸面111相适配的弧形凹面121以及与所述圆柱凸台113相适配的螺旋槽122,所述履带主体12两侧均设有用于与所述驱动齿轮一21和驱动齿轮二31相啮合的导柱123。
9、优选的,所述驱动齿轮一21安装于辅助锁定组件支座两侧,所述辅助锁定组件22包括相啮合梯形齿条导向块221和调节齿轮224,所述梯形齿条导向块221穿设于所述辅助锁定组件支座中部的滑动杆222上,所述调节齿轮224安装于所述辅助锁定组件支座顶部调节电机223的输出端,所述越障控制器44通过控制调节电机223带动调节齿轮224旋转,进而驱动梯形齿条导向块221沿滑动杆222横向移动。
10、优选的,所述驱动齿轮二31安装于被动解锁组件框架两侧,所述被动解锁组件框架后端内侧设有与所述锁定销11相对应的解锁凸台。
11、优选的,所述支撑板41由多个顺次连接的板单元组成,相邻两个板单元均通过铰链铰接。
12、优选的,所述支撑块42通过螺栓固定连接于对应的板单元上。
13、二、一种柔性可变自由度履带机器人的控制方法
14、基于同一发明构思,本发明还提供了一种如上所述柔性可变自由度履带机器人的控制方法,主要包括如下步骤:
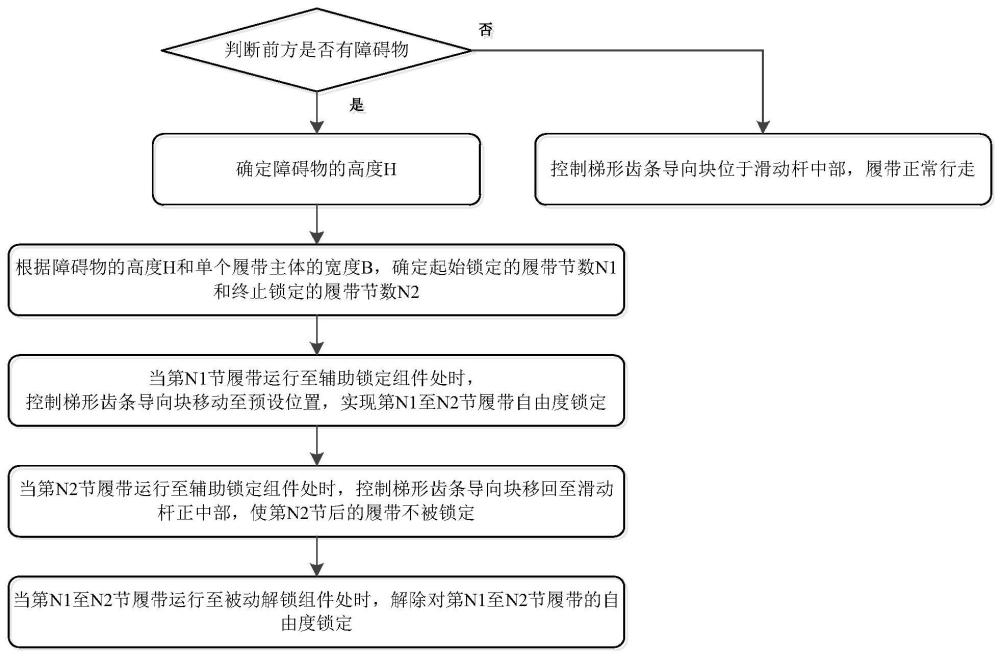
15、s1,通过视觉识别摄像头判断前方是否有障碍物,若否,则执行步骤s2,若是,则执行步骤s3;
16、s2,越障控制器控制梯形齿条导向块位于滑动杆中部,并通过驱动齿轮一和驱动齿轮二同步驱动履带正常行走;
17、s3,通过视觉识别摄像头确定障碍物的高度h;
18、s4,越障控制器根据所述障碍物的高度h和单个履带主体的宽度b,确定起始锁定的履带节数n1和终止锁定的履带节数n2;
19、s5,当第n1节履带运行至辅助锁定组件处时,控制梯形齿条导向块移动至滑动杆上的预设位置,在所述梯形齿条导向块的导向作用下,使第n1至n2节履带锁定销上的弧形凸面与对应履带主体上的弧形凹面卡接,实现第n1至n2节履带自由度锁定;
20、s6,当第n2节履带运行至辅助锁定组件处时,控制梯形齿条导向块移回至滑动杆正中部,使第n2节后的履带不被锁定;
21、s7,当第n1至n2节履带运行至被动解锁组件处时,所述锁定销在所述解锁凸台的导向作用下,解除对第n1至n2节履带的自由度锁定。
22、优选的,所述起始锁定的履带节数n1和终止锁定的履带节数n2的确定公式如下:
23、
24、
25、式中,θ为履带机器人翘起的角度。
26、本发明与现有技术相比具有以下主要的优点:
27、1、本发明提供的一种柔性可变自由度履带机器人,通过在机器人履带的履带主体上安装的锁定销,能够使履带主体彼此之间的自由度发生变化,从而使履带机器人能够以一定角度翘起弯曲,继而翻越壁面较为陡峭的障碍物,且由于履带和支撑结构都保持有较大柔性,在翻越障碍时整体重心可以保持稳定变化;
28、2、本发明提供的柔性可变自由度履带机器人控制方法,通过视觉识别摄像头与越障控制器相配合,能够自动识别障碍物高度并切换对应的控制模式,实现狭小空间内小尺寸履带机器人高效、快速的翻越障碍物。
技术特征:1.一种柔性可变自由度履带机器人,其特征在于,包括可变自由度履带(1)、头部驱动与锁定模块(2)、尾部驱动与解锁模块(3)和支撑组件(4),所述可变自由度履带(1)由多个顺次连接的履带模块组成,每个履带模块均包括履带主体(12)、锁定销(11)和连接轴(13);所述头部驱动与锁定模块(2)安装于支撑组件(4)头部,且包括驱动齿轮一(21)和辅助锁定组件(22);所述尾部驱动与解锁模块(3)安装于支撑组件(4)尾部,且包括驱动齿轮二(31)和被动解锁组件(32);所述支撑组件(4)包括支撑板(41)和支撑块(42);
2.根据权利要求1所述的一种柔性可变自由度履带机器人,其特征在于,所述锁定销(11)设有两组且对称设置于所述履带主体(12)两端,相邻两个履带主体(12)通过所述连接轴(13)相连接。
3.根据权利要求2所述的一种柔性可变自由度履带机器人,其特征在于,所述锁定销(11)外圆柱面上设有弧形凸面(111)和两个长度不同且交错设置的圆柱凸台(113),所述锁定销(11)内圈设有与所述连接轴(13)相适配的十字圆柱(112)。
4.根据权利要求3所述的一种柔性可变自由度履带机器人,其特征在于,所述履带主体(12)上开设有与所述弧形凸面(111)相适配的弧形凹面(121)以及与所述圆柱凸台(113)相适配的螺旋槽(122),所述履带主体(12)两侧均设有用于与所述驱动齿轮一(21)和驱动齿轮二(31)相啮合的导柱(123)。
5.根据权利要求1所述的一种柔性可变自由度履带机器人,其特征在于,所述驱动齿轮一(21)安装于辅助锁定组件支座两侧,所述辅助锁定组件(22)包括相啮合梯形齿条导向块(221)和调节齿轮(224),所述梯形齿条导向块(221)穿设于所述辅助锁定组件支座中部的滑动杆(222)上,所述调节齿轮(224)安装于所述辅助锁定组件支座顶部调节电机(223)的输出端,所述越障控制器(44)通过控制调节电机(223)带动调节齿轮(224)旋转,进而驱动梯形齿条导向块(221)沿滑动杆(222)横向移动。
6.根据权利要求1所述的一种柔性可变自由度履带机器人,其特征在于,所述驱动齿轮二(31)安装于被动解锁组件框架两侧,所述被动解锁组件框架后端内侧设有与所述锁定销(11)相对应的解锁凸台。
7.根据权利要求1所述的一种柔性可变自由度履带机器人,其特征在于,所述支撑板(41)由多个顺次连接的板单元组成,相邻两个板单元均通过铰链铰接。
8.根据权利要求7所述的一种柔性可变自由度履带机器人,其特征在于,所述支撑块(42)通过螺栓固定连接于对应的板单元上。
9.一种如权利要求1至8中任意一项所述柔性可变自由度履带机器人的控制方法,其特征在于,包括如下步骤:
10.根据权利要求9所述的控制方法,其特征在于,所述起始锁定的履带节数n1和终止锁定的履带节数n2的确定公式如下:
技术总结本发明涉及履带机器人控制技术领域,具体涉及一种柔性可变自由度履带机器人及其控制方法。本发明提供的一种柔性可变自由度履带机器人,通过在机器人履带的履带主体上安装的锁定销,能够使履带主体彼此之间的自由度发生变化,从而使履带机器人能够以一定角度翘起弯曲,继而翻越壁面较为陡峭的障碍物,且由于履带和支撑结构都保持有较大柔性,在翻越障碍时整体重心可以保持稳定变化;本发明提供的柔性可变自由度履带机器人控制方法,通过视觉识别摄像头与越障控制器相配合,能够自动识别障碍物高度并切换对应的控制模式,实现狭小空间内小尺寸履带机器人高效、快速的翻越障碍物。技术研发人员:肖莉,汝梦奇,于传浩,张尚盈,宋聪,吴冕之受保护的技术使用者:武汉工程大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/230645.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种防锈蚀商用车货厢
下一篇
返回列表