一种仿生青蛙弹跳装置
- 国知局
- 2024-08-01 08:10:56
本发明涉及仿生机器人,具体涉及一种仿生青蛙弹跳装置。
背景技术:
1、仿生学的主要目标是通过模拟生物的结构和功能,为人类创造新的技术,以满足人们对高效、环保和节能的需求。在自然界中,青蛙以其出色的运动能力、敏锐的感知能力和高效的捕食技巧而闻名。这些特性使得青蛙在许多方面超越了其他动物,尤其在环境适应性和生存策略方面。随着科技的发展,仿生青蛙机器应运而生,旨在模仿青蛙的特性,为人类提供一种全新的运动和感知方式。
2、青蛙是一种优秀的捕食者和游泳者,它们的身体结构和生理机能赋予了它们独特的优势。青蛙的后腿能够迅速而有力地蹬地,帮助它们在水下快速游动,因此仿生青蛙机器的后腿采用仿生设计,保证了弹跳高度和跳跃距离。
3、国外对于这方面的研究起步较早且研究比较深入。日本东京大学利用气动的方式对肌肉进行驱动,发明了仿青蛙的跳跃型机器人mowgli,该机器人具有两足,后肢具有多个关节。首尔国立大学gwang-pil jung和kyu-jin cho通过研究采用青蛙的动力后肢和同步腿操作实现的力矩抵消原理,为微型跳跃型机器人赋予转向能力每条腿都有自己的推力,这可以通过让机器用两条产生动力的腿来模拟青蛙各种跳跃姿态。相较之下国内研究起步较晚但仍然有不菲的成就:其中北方工业大学的仿生青蛙系统采用弹簧杠杆机构的结构,主要是利用电机拉伸弹簧产生并储存弹性势能,最后对机构的运动学性能进行了详细分析并对其游泳运动过程进行仿真。哈尔滨工业大学提出的青蛙跳跃机器人的后肢采用五杆机构作为主体,利用气动装置作为驱动机构。但此类仿生青蛙机器人成本较高且结构复杂,技术不成熟导致性能不稳定。一些传统行业,如制造业、建筑业等,虽然看到了机器人的潜力,但由于技术难度和成本问题,往往无法承担引入机器人的成本,导致此类投入生产使用的机器人较少。
4、如专利号为202210605933.8的中国发明专利,提供了一种仿青蛙跳跃机器人,该机器人通过对整体形状的合理设置,优化了装置的运动过程且能在多种复杂地形使用,又如专利号为202210487422.0的中国发明专利,提供了一种基于凸轮突变的仿生青蛙弹跳机器人,该机器人通过对蓄能装置和传递结构的优化,具有高效的跳跃性能。但青蛙在首次跳跃无收腿动作,目前的仿生青蛙弹跳机器人在跳跃启动时,后腿装置仍有收腿动作,未能模拟真实青蛙起跳时的起跳动作,不符合仿生学原理。于是,有鉴于此,提出一种仿生青蛙弹跳装置,以解决上述问题。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种仿生青蛙弹跳装置,以解决上述背景技术中提出的现有的仿生青蛙弹跳机器人在跳跃启动时,后腿装置仍有收腿动作,未能模拟真实青蛙起跳时的起跳动作,不符合仿生学原理技术问题。
2、为实现上述目的,本发明提供如下技术方案,一种仿生青蛙弹跳装置,包括有:
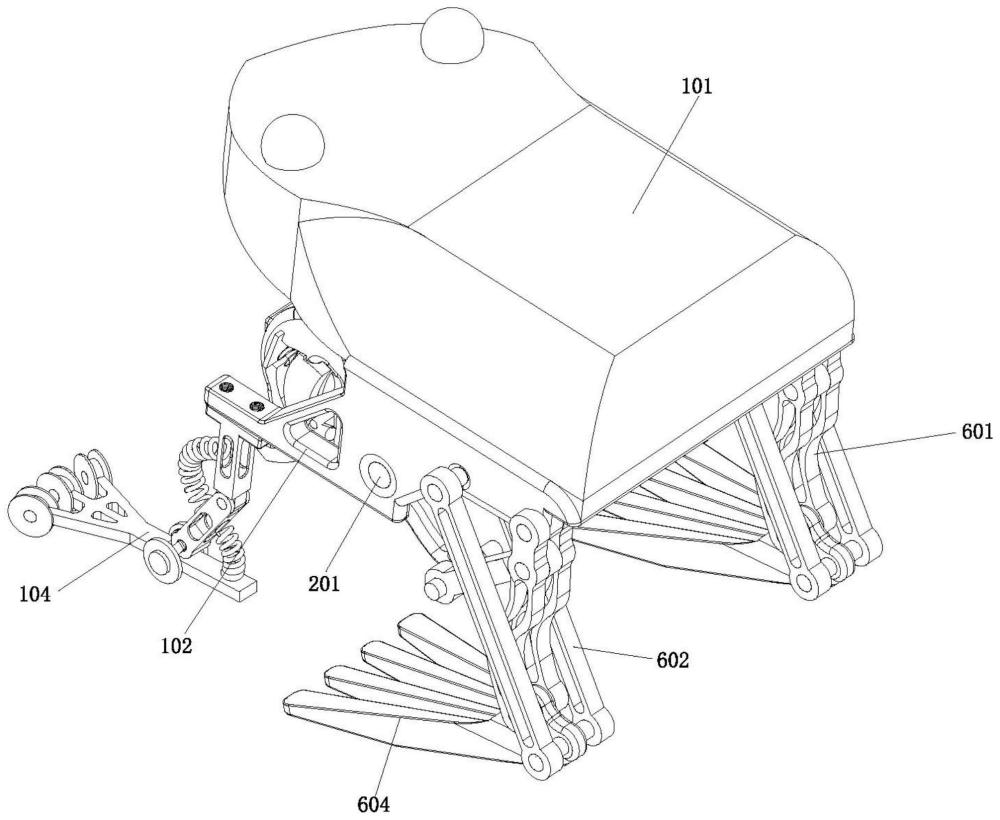
3、仿生外壳,底部设置有安装轴和前支撑部;
4、后腿盘,铰接在所述安装轴上;
5、后脚掌,设置在所述仿生外壳上,并与所述后腿盘通过连杆机构进行连接,所述后腿盘在转动的过程中可通过所述连杆机构驱动所述后脚掌做蹬腿动作;
6、扭簧,绕设在所述安装轴上,两端分别与所述仿生外壳和所述后腿盘连接;蓄能机构,设置在所述仿生外壳底部,以间歇驱动所述扭簧收缩;及
7、限位机构,设置在所述后腿盘上,以对收缩后的所述扭簧端部限位。
8、在一个优选的实施方式中,所述仿生外壳底部设置有安装板和安装架,所述安装轴设置在所述安装架上,所述扭簧的一端与所述安装板固定连接,所述前支撑部设置在所述安装架的端部。
9、在一个优选的实施方式中,所述连杆机构包括有:
10、第一支撑杆,一端铰接在所述安装架上,另一端与所述后脚掌铰接;
11、第二支撑杆,与所述第一支撑杆交错布置,且其一端铰接在所述安装架上,另一端与所述后脚掌铰接;及
12、联动杆,一端与所述第一支撑杆中段铰接,另一端与所述后腿盘铰接。
13、在一个优选的实施方式中,所述后腿盘上开设有第一通槽和第二通槽,所述扭簧的一端设置有延伸段和弯折段,所述蓄能机构与所述延伸段连接,所述弯折段活动穿设在所述第一通槽内,所述限位机构设置在所述第二通槽内,且可活动至所述第一通槽内以对所述弯折段限位。
14、在一个优选的实施方式中,所述蓄能机构包括有:
15、舵机,固定设置在所述安装板上;及
16、扇叶,设置有两组,且均设置在所述舵机的输出轴上,所述扇叶可与所述延伸段抵接,所述扇叶一侧设置有弧面,端部设置有平面。
17、在一个优选的实施方式中,所述限位机构包括有:
18、限位块,一端铰接在所述第二通槽内,另一端可活动至所述第一通槽内并抵接所述弯折段;
19、挡块,设置在所述限位块上,所述第二通槽上开设有滑槽,所述挡块滑动卡设在所述滑槽内;及
20、第一弹性件,一端与所述限位块抵接,另一端与所述第二通槽内侧壁抵接。
21、在一个优选的实施方式中,所述后腿盘沿所述安装轴的轴线滑动设置在所述安装轴上。
22、在一个优选的实施方式中,其中一组所述扇叶与所述限位块通过复位组件进行连接,通过所述复位组件驱动所述限位块收起并脱离所述弯折段。
23、在一个优选的实施方式中,所述复位组件包括有:
24、第一凸块,设置在其中一组所述扇叶上;
25、第二凸块,设置在所述限位块上与所述扇叶的相对侧,且可与所述第一凸块抵接,所述第一凸块和所述第二凸块的接触面均为斜面;及
26、第二弹性件,固定设置在所述后腿盘上,且其端部与所述安装架滑动抵接。
27、在一个优选的实施方式中,所述安装轴上设置有可与所述后腿盘抵接的止退环,所述后腿盘的滑动距离小于所述弯折段的长度。
28、与现有技术相比,本发明具备以下有益效果:
29、1.该装置在使用时,将其位置摆正后,使后脚掌和前支撑部与平面接触,初始状态下扭簧呈松弛状,可通过蓄能机构驱动扭簧收缩,扭簧收缩后可通过限位机构对扭簧的端部限位,而当蓄能机构解除对扭簧的收缩后,扭簧复位并通过限位机构与后腿盘的配合驱动后腿盘沿安装轴的轴线转动,后腿盘在转动的过程中通过连杆机构后脚掌做蹬腿动作,以模仿青蛙弹跳动作,且弹跳过程中可继续通过蓄能机构对扭簧进行收缩,通过扭簧的端部带动后腿盘复位以使得后脚掌收起,从而可模拟青蛙的连续弹跳,且在弹跳启动时后腿盘和后脚掌无收腿动作,能模拟真实青蛙起跳时的起跳动作,更加符合真实青蛙的预备起跳时肌肉蓄力而肢体不移动的真实情况。
30、2.该装置在使用的过程中,通过启动舵机带动两组扇叶转动,其中一组扇叶在转动的过程中通过对延伸段的抵接使得弯折段在第一通槽内活动,以启动扭簧收缩,并在第一弹性件的作用下使得限位块活动至第二通槽内对弯折段进行限位,并在扇叶脱离延伸段后扭簧复位完成弹跳动作。弹跳完成后,可通过另一组扇叶与延伸段的抵接驱动扭簧收缩以使得后腿盘复位带动后脚掌收起,且该组扇叶在转动的过程中通过其一侧的第一凸块与限位块上第二凸块的抵接使得限位块收起对第一弹性件进行压缩,以使得限位块脱离弯折段控制扭簧在第一通槽内活动复位,且在限位块运动至极限位置后推动后腿盘在安装轴上滑动对第二弹性件进行压缩,直至第一凸块脱离第二凸块,即可在第二弹性件的作用下使得后腿盘滑动复位,在第一弹性件的作用下使得限位块复位,以备下一次弹跳,在合适的时间控制舵机停止即可使得该装置无需人为操作便可复位,有效的提高了使用时的便捷性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/230648.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表